本文主要是介绍【分享NVIDIA GTC 23大会干货】从乌龟到兔子转变:人工智能如何将任何车手变成赛车手 [S51328],希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
From Tortoise to Hare: How AI Can Turn Any Driver into a Race Car Driver [S51328]
在赛道上进行高性能驾驶令人兴奋,但它并不广泛,因为它需要经过多年磨练的高级驾驶技能。Rimac的驾驶教练(DRIVER COACH)平台可以使任何驾驶员都能从车载AI系统中学习,并在赛道上享受高性能驾驶。此外,还可以使用全自动驾驶以非常高的速度(超过350km / h)进行驾驶。我们将讨论如何使用人工智能来促进驾驶员教育,并以令人难以置信的高速安全地提供赛车体验。我们将深入到整个开发流程,从数据收集到模型训练,再到使用NVIDIA DRIVE Sim 进行模拟测试,最后在NVIDIA DRIVE 平台上部署软件。了解 AI 技术如何击败人类专业赛车手。
此次报告是由克罗地亚超跑品牌RIMAC Technology公司的自动驾驶研发总监Sacha Vazic在关于无人驾驶塞车方面进行工作介绍。
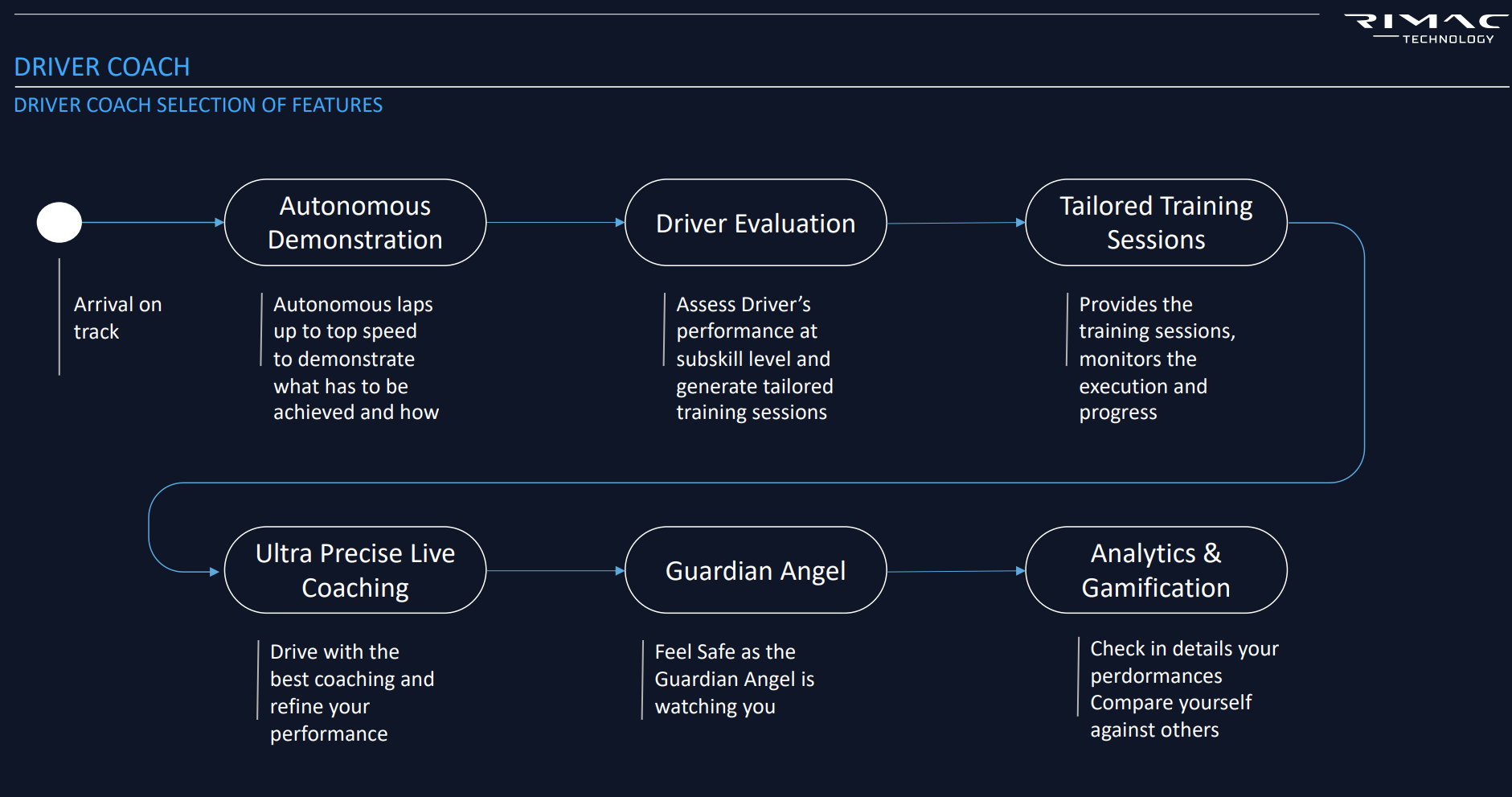
首先讲述一下DRIVER COACH流程。当到达一个比赛的赛道后,DRIVER COACH首先根据赛道进行自动进行最高时速的模拟预演,通过视觉和听觉反馈告诉你要做什么比如:赛车策略、什么时候出现刹车过热,要进行冷却等。观看完预演之后,接下来进行实际中的开车上路参赛。在驾驶过程中,人工智能进行实时监测驾驶员的状态对驾驶员的驾驶技能在行车轨迹、制动、转向和速度等方面进行评估并根据评估结果制定针对性的课程。也可以为您提供更加精准直播训练,会为您提供最好的教练为您提供技术指导。在训练过程中DRIVER COACH实时监控状态,如遇突发状况车辆会自动转向、刹车最终让汽车安全停下来。最后可以查询分析您在驾驶过程中的操作细节并且可以其他对手操作进行比较。
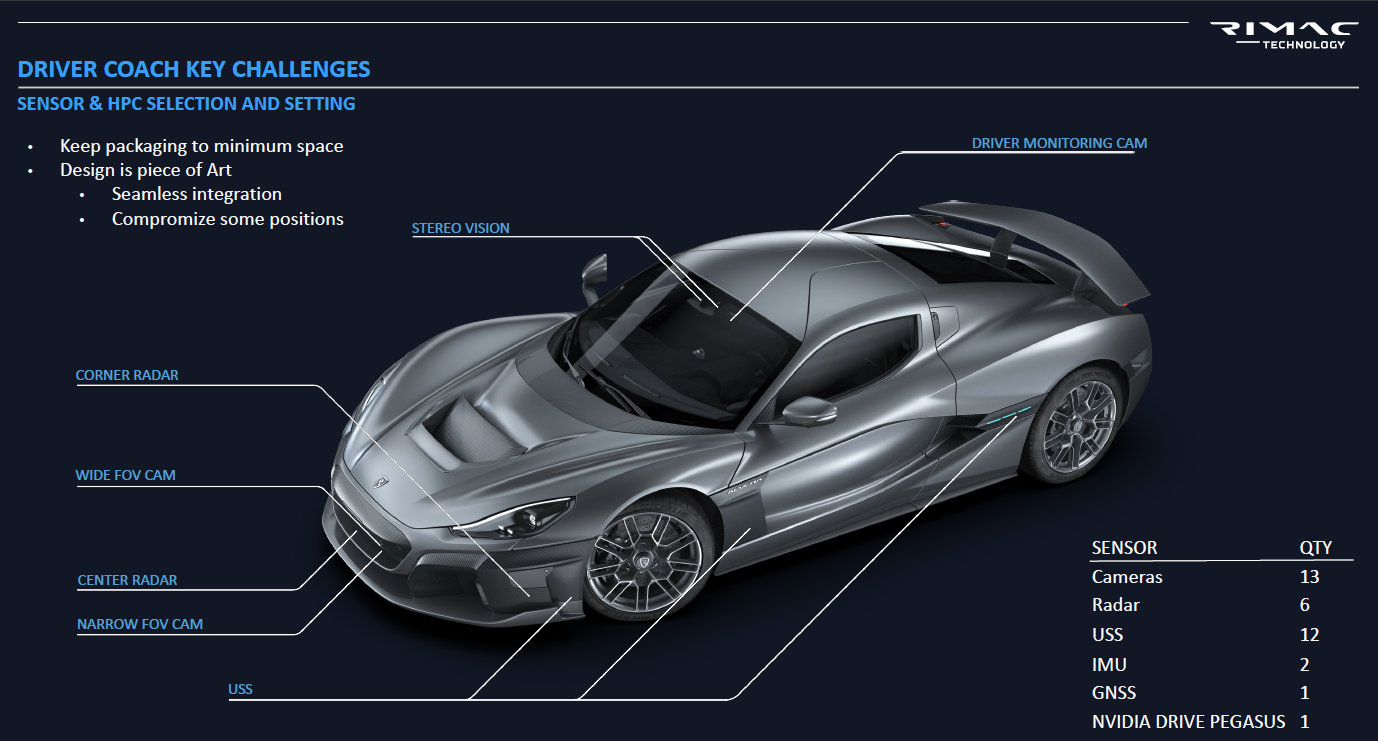
实现上述的复杂的过程首先的挑战就是传感器选择和设置,不仅要满足实时探测需求也要满足车辆线条设计的美观。毕竟赛车是一种艺术品,不能用大的激光雷达放在车顶影响美观,但又不得不谨慎设计避免影响传感器探测性能。车辆中包含了13个摄像头、6个雷达、12个超声波传感器、还有一个超级计算机——NVIDIA DRIVE PEGASUS。
实现DRIVER COACH 关键挑战主要有四个方面:
场景理解 : 对不同类别的道路,以及车辆周边的环境和路况标志等进行识别。
定位:对于定位需要进行高精度定位,可以为车辆提供更精确完美的线路。结合GNSS和视觉定位双重定位。
控制和运动规划:结合对手车辆的状态做实时动态调整赛车策略,可以使得赛车可以在安全范围内进行超车或者在车辆过热时需要刹车冷却。
安全矩阵:在比赛时可能会出现车辆之间间距或者车辆与障碍物之间间距非常小的情况,于此同时车速还特别快,此时会给驾驶员带来安全隐患。所以我们带来了Guardian Angel (DRIVER COACH 中的一种技术)通过实时的监控数据非常快且准确的提供制动助力或者转向助力来将风险降到最低。
NEVERA DRIVER COACH的技术核心主要分为四个部分:驾驶监控和实时守护、场景理解、定位和地图映射、运动规划。所有的DRIVER COACH的软件都部署在了NVIDIA DRIVE AGX PEGASUS 平台上。

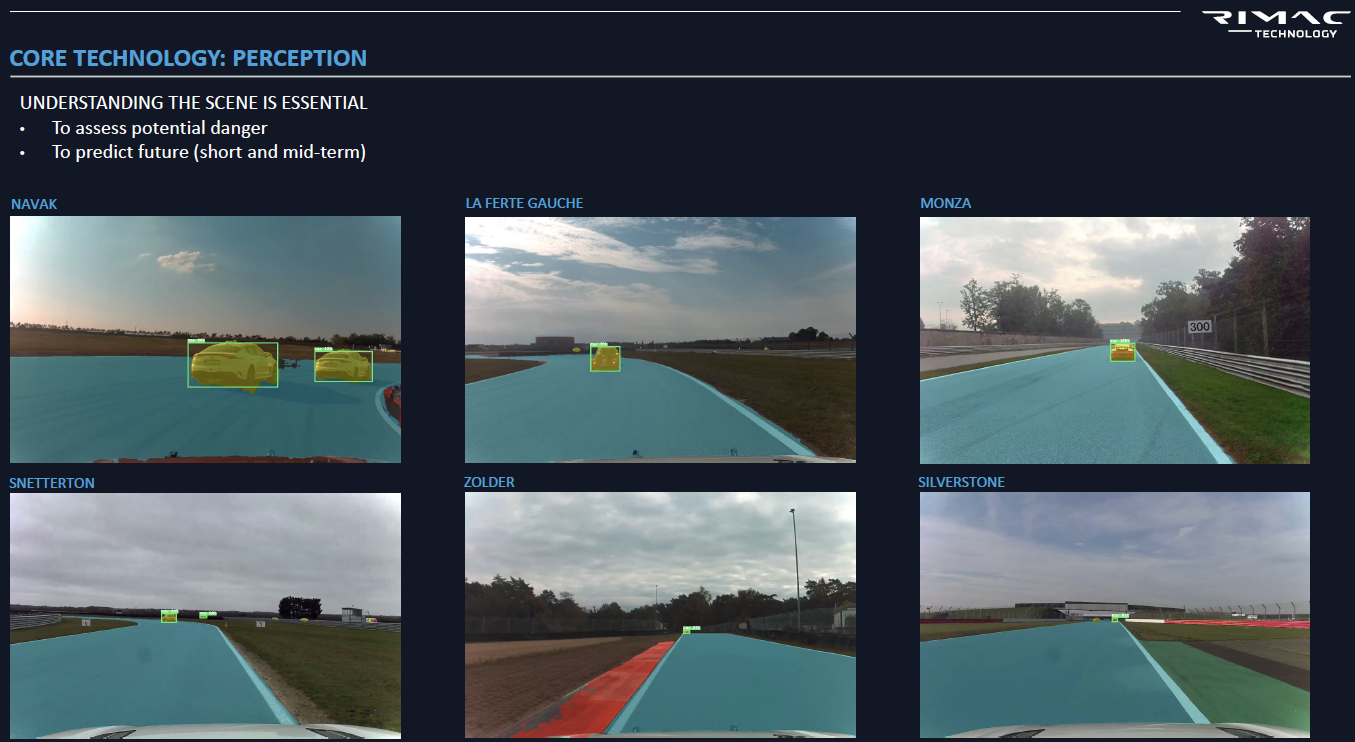
核心技术一:感知
结合语义分割和目标检测技术对不同的赛道上道路物体等进行实时识别感知。在赛道曲线、道路切换、不同的形状、颜色道路都会为识别带来了挑战。
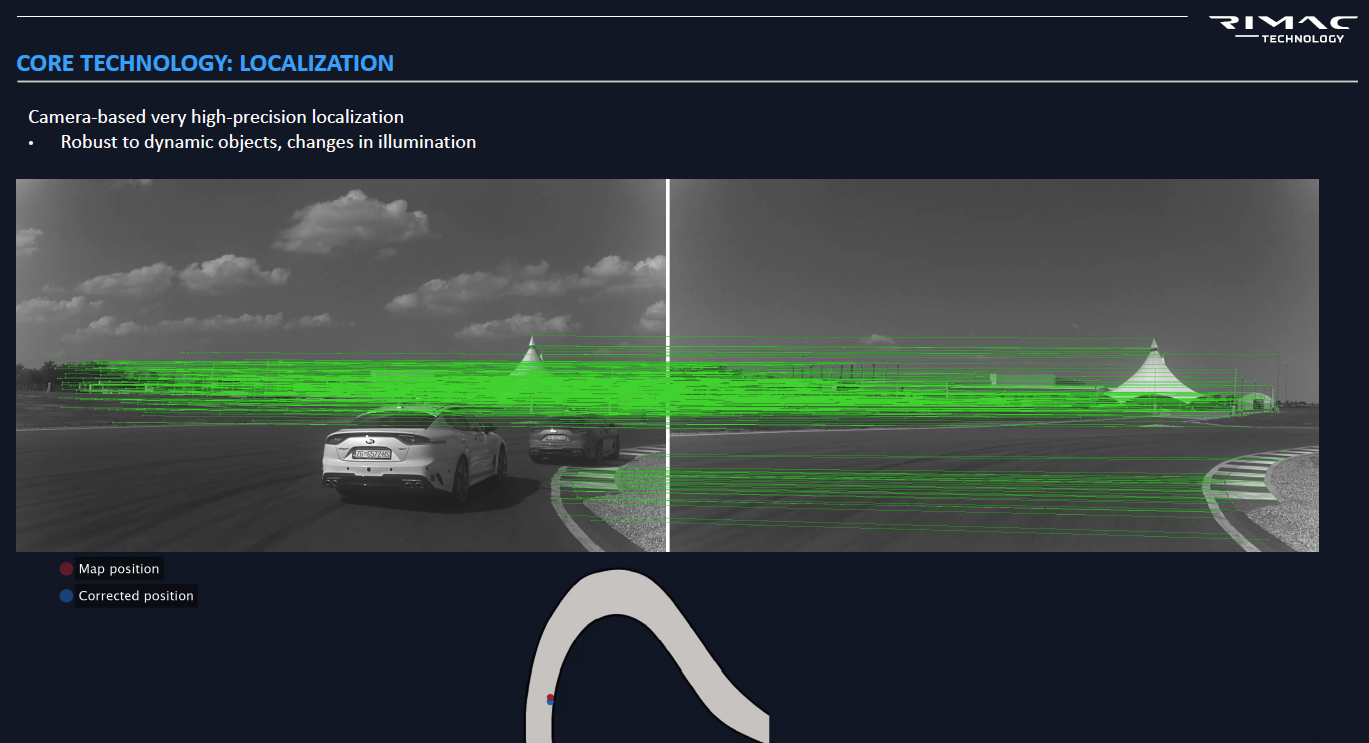
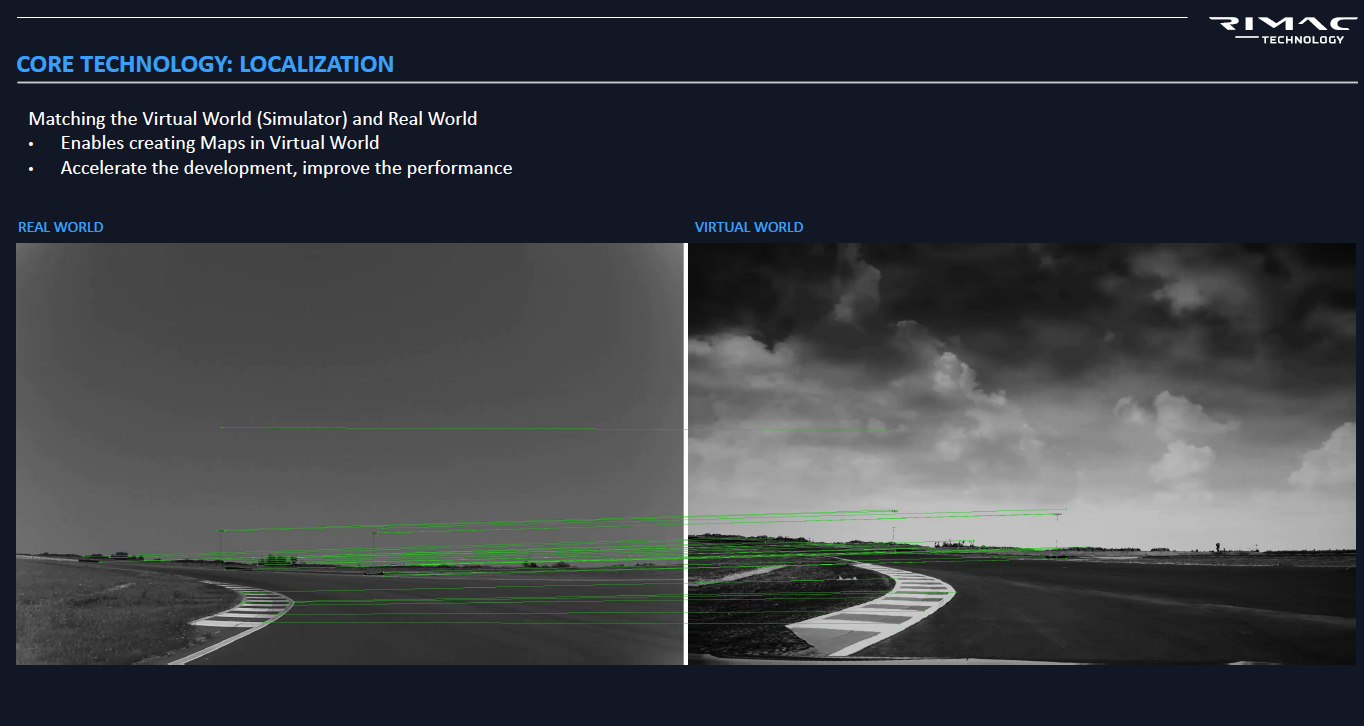
核心技术二:定位
基于摄像头的高精度定位。对动态对象,照明变化的鲁棒性。可以通过系统存储的场景与实时采集图像数据进行实时匹配,用于车辆定位。
同时我们尝试将虚拟场景与实际场景相结合,将现实世界的场景同步构建到虚拟场景中,用于我们全面开发的模拟器上进行测试,可以节省大量的成本和时间。
核心技术三:先进的驾驶员监控技术
驾驶模拟实验,可提供重复性和可靠的数据。
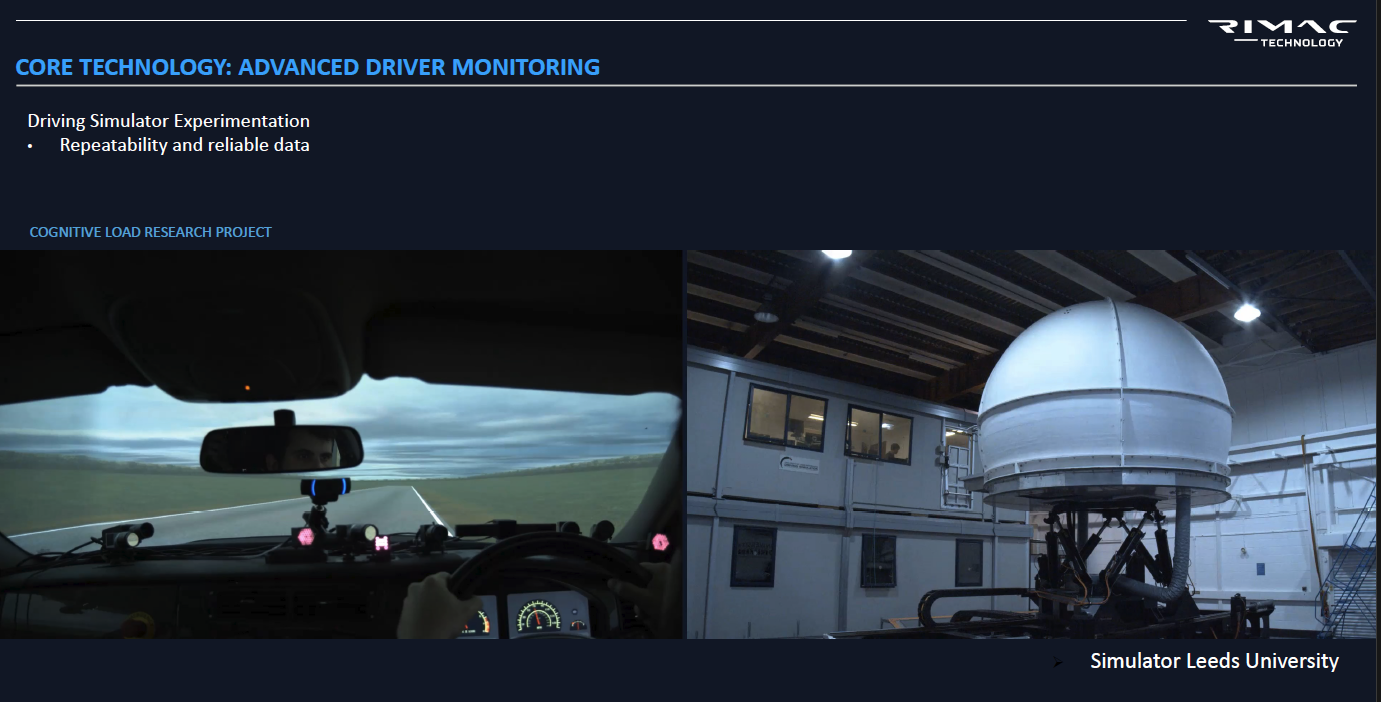
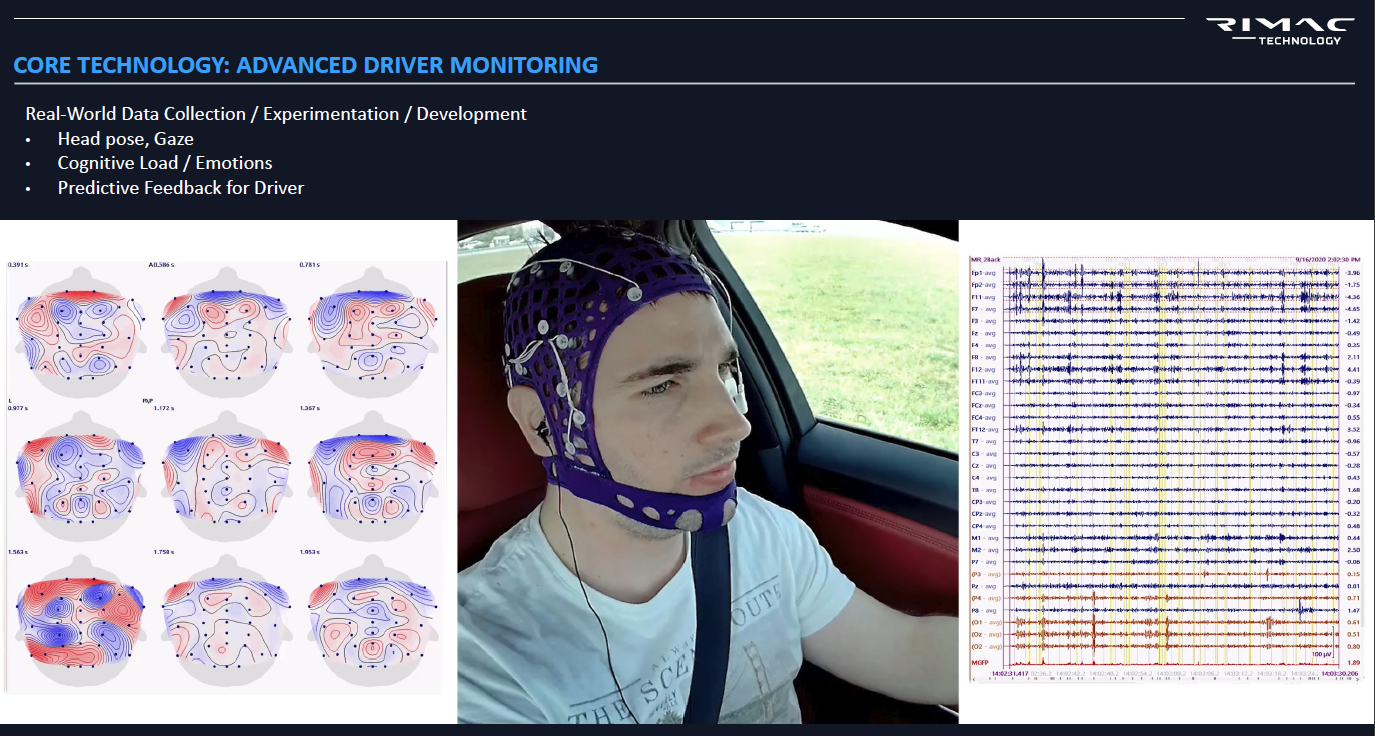
在模拟实验中在驾驶舱内加入了脑电图扫描仪,探究认知负荷对非职业车手和职业赛车手是否有不同的影响。
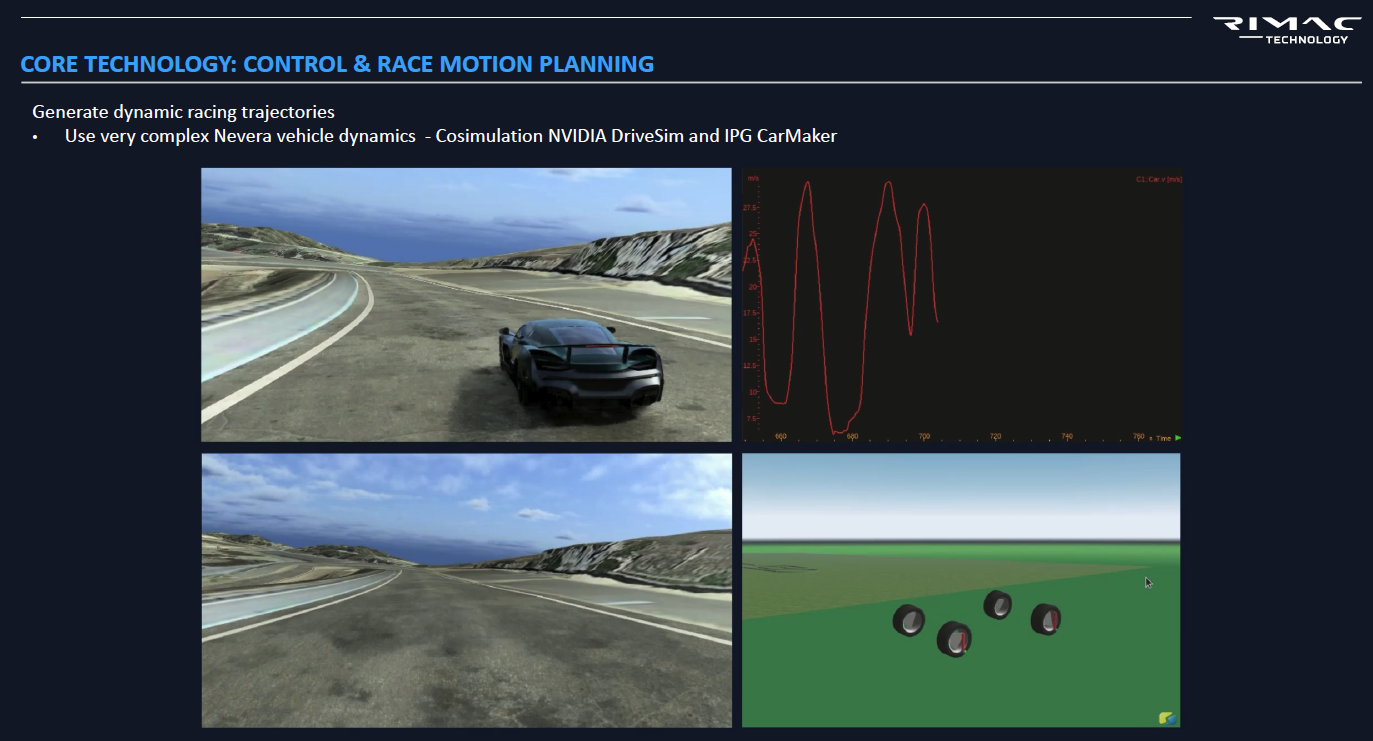
核心技术四:控制和比赛运动策略
我们使用了IPG CarMarker的 Nevera模型生成动态赛车轨迹,成功的整合了它作为协同模拟器在驾驶模拟器中。
最后还将自动驾驶的赛车与5名职业赛车手进行技术较量。黑色点代表的是自动驾驶的赛车,虽然一直处于第二名,但在弯道处自动驾驶的赛车更加精准过弯进行超车。

未来自动驾驶的技术在硬件平台的升级的加持下会更加成熟,更快全面进入我们的生活。
这篇关于【分享NVIDIA GTC 23大会干货】从乌龟到兔子转变:人工智能如何将任何车手变成赛车手 [S51328]的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





