本文主要是介绍AD9371 官方例程 NO-OS 主函数 headless 梳理(一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
AD9371 系列快速入口
AD9371+ZCU102 移植到 ZCU106 : AD9371 官方例程构建及单音信号收发
ad9371_tx_jesd -->util_ad9371_xcvr接口映射: AD9371 官方例程之 tx_jesd 与 xcvr接口映射
AD9371 官方例程 时钟间的关系与生成 : AD9371 官方例程HDL详解之JESD204B TX侧时钟生成(一)
JESD204B相关IP端口信号 : AD9371 官方例程HDL JESD204B相关IP端口信号
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(一)
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(二)
裸机程序配置 AD9528、AD9371、FPGA IP: AD9371 官方例程裸机SW 和 HDL配置概述(三)
文章目录
- 前言
- 一、xilinx platform
- 二、AD9528
- 三、CLKGEN IP
- 四、JESD 链路层初始化
- 五、ADXCVR 物理层初始化
- 六、AD9371 初始化步骤
- 6.1 复位
- 6.2 MYKONOS 初始化
- 6.3 检查CLKPLL的锁定状态
- 6.4 执行MCS
- 6.5 初始化ARM处理器、加载ARM二进制文件、读取AD9371 ARM版本
- 6.6 设置RF PLL频率、检查RF PLL锁定状态
- 6.7 设置AD9371 GPIO
- 6.8 设置 RX、Obs 和 SNIFFER 手动增益 和 TX 衰减
- 6.9 运行初始化校准,等待初始化校准完成
- 6.10 (可选,例程未使用)使用PA进行初始化外部LOL校准
- 未完,见下一节
前言
官方例程主函数需要配置和初始化 AD9528、AD9371、FPGA IP,打开DDS 或者通过DMA 搬运发送和接收数据
一、xilinx platform
打开 指令和数据 Cache ,初始化 platform(包含 SPI 和 GPIO)
Xil_ICacheEnable();/* Enable the instruction cache. */Xil_DCacheEnable();ret = platform_init();if (ret != 0) {printf("error: platform_init() failed\n");goto error_0;}
二、AD9528
通过AD9528复位引脚,复位 AD9528
通过 VCXO REFA outFrequency_Hz[1] ,得到 PLL1 PLL2 output 0-13 和 sysref 各个配置参数,存入 clockAD9528_device
通过 SPI 初始化 AD9528 的 PLL1 PLL2 output 和 sysref
error = AD9528_resetDevice(clockAD9528_device);if (error != ADIERR_OK) {printf("AD9528_resetDevice() failed\n");error = ADIERR_FAILED;goto error_1;}error = AD9528_initDeviceDataStruct(clockAD9528_device,clockAD9528_device->pll1Settings->vcxo_Frequency_Hz,clockAD9528_device->pll1Settings->refA_Frequency_Hz,clockAD9528_device->outputSettings->outFrequency_Hz[1]);if (error != ADIERR_OK) {printf("AD9528_initDeviceDataStruct() failed\n");error = ADIERR_FAILED;goto error_1;}/* Initialize the AD9528 by writing all SPI registers */error = AD9528_initialize(clockAD9528_device);if (error != ADIERR_OK)printf("WARNING: AD9528_initialize() issues. Possible cause: REF_CLK not connected.\n");
三、CLKGEN IP
通过axi_clkgen_init 赋值给 rx_clkgen 等
通过参考时钟和需要生成目标时钟,得到配置参数,配置到 IP的MMCM中,利用 MMCM 得到所需时钟,详见第二部分
status = axi_clkgen_init(&rx_clkgen, &rx_clkgen_init);status = axi_clkgen_init(&tx_clkgen, &tx_clkgen_init);status = axi_clkgen_init(&rx_os_clkgen, &rx_os_clkgen_init);status = axi_clkgen_set_rate(rx_clkgen, rx_div40_rate_hz);status = axi_clkgen_set_rate(tx_clkgen, tx_div40_rate_hz);status = axi_clkgen_set_rate(rx_os_clkgen, rx_os_div40_rate_hz);
利用axi_clkgen_calc_params(clkgen, clkgen->parent_rate, rate, &d, &m, &dout); 计算MMCM中的 M、 D、 O
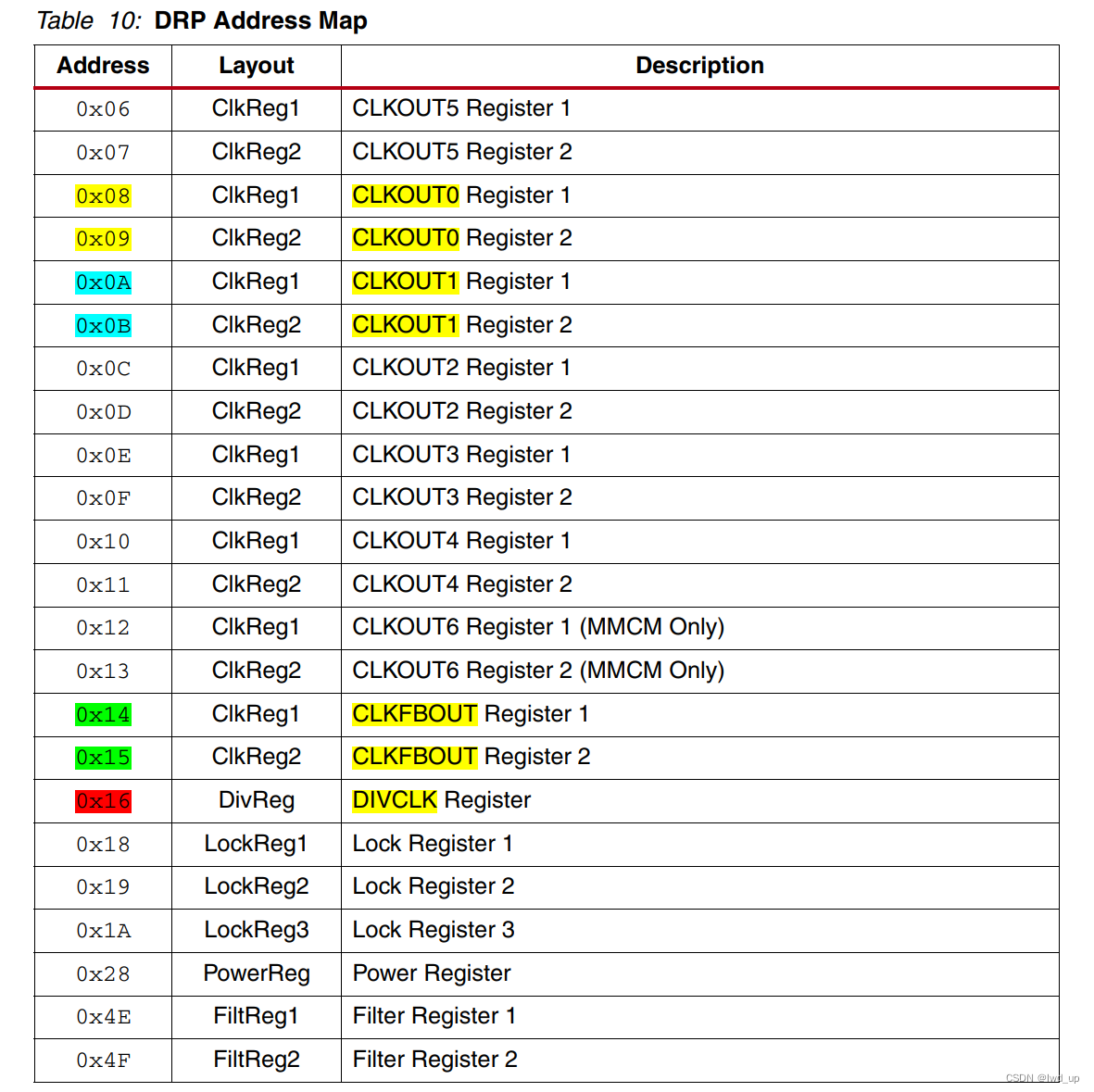
将 dout ,也就是 O0 写入 MMCM_REG_CLKOUT0_1 和 MMCM_REG_CLKOUT0_2 (0x08 和 0x09,OUT0的DRP地址)
axi_clkgen_calc_clk_params(dout, &low, &high, &edge, &nocount);
axi_clkgen_mmcm_write(clkgen, MMCM_REG_CLKOUT0_1, (high << 6) | low, 0xefff);
axi_clkgen_mmcm_write(clkgen, MMCM_REG_CLKOUT0_2, (edge << 7) | (nocount << 6),0x03ff)
得到的 D 和 M 类似 O0,写入相应的寄存器中
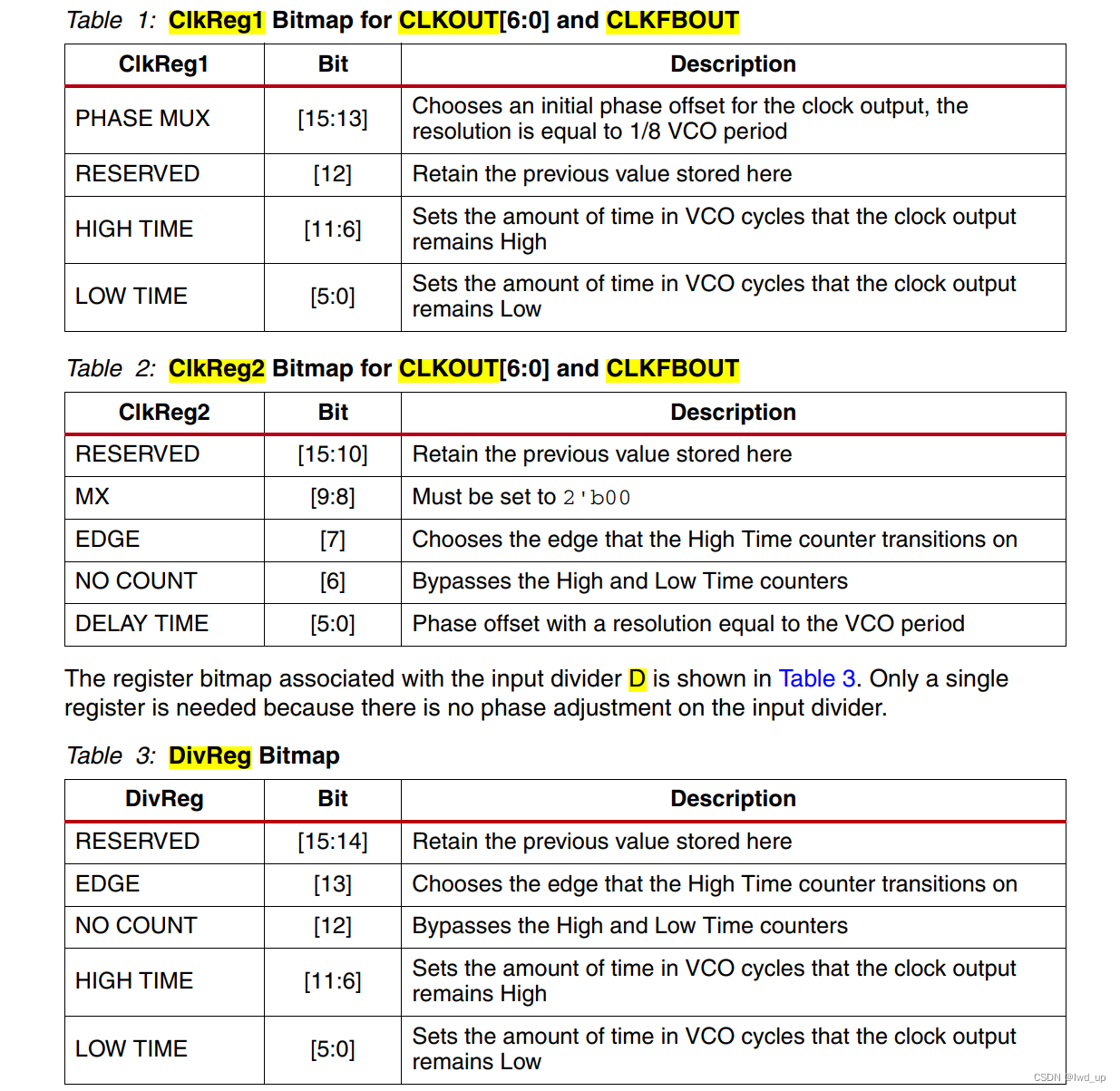
参考 XAPP888
四、JESD 链路层初始化
初始化 tx_jesd 、rx_jesd 等,并把 octets_per_multiframe 和 octets_per_frame 配置给IP核,octets_per_multiframe 除以 4,得到 up_cfg_beats_per_multiframe ,在链路层的LMFC中使用
status = axi_jesd204_rx_init(&rx_jesd, &rx_jesd_init);status = axi_jesd204_tx_init(&tx_jesd, &tx_jesd_init);status = axi_jesd204_rx_init(&rx_os_jesd, &rx_os_jesd_init);
五、ADXCVR 物理层初始化
初始化 tx_adxcvr、rx_adxcvr 等,配置物理层 sys_clk_sel、 out_clk_sel 、LPM_DFE_N 等参数,通过 adxcvr_clk_set_rate(xcvr, xcvr->lane_rate_khz, xcvr->ref_rate_khz) 计算并配置(通过DRP) QPLL 、CPLL、 t/rx_out_div 和 clk25M ,得到正确的 lane rate
status = adxcvr_init(&rx_adxcvr, &rx_adxcvr_init);status = adxcvr_init(&tx_adxcvr, &tx_adxcvr_init);status = adxcvr_init(&rx_os_adxcvr, &rx_os_adxcvr_init);
六、AD9371 初始化步骤
6.1 复位
通过 GPIO 复位 AD9371,为初始化做准备
MYKONOS_resetDevice(&mykDevice))
6.2 MYKONOS 初始化
根据有效的 Rx/Tx/ORx/sniffer profiles,配置AD9371的 deserializer 、 Tx1/Tx2 deframer, serializer, Rx1/Rx2 framer, 和 ORx framer,设置 clock PLL 和 digital clocks(MYKONOS_initDigitalClocks),
MYKONOS_initialize(&mykDevice))
6.3 检查CLKPLL的锁定状态
调用MYKONOS_checkPllLockStatus并使用用户定义的代码执行CLKPLL的锁定检查
MYKONOS_checkPllsLockStatus(&mykDevice,&pllLockStatus)
6.4 执行MCS
当使用多个收发器或甚至只有一个收发器时,需要 Tx 和 Rx(obs)JESD204B数据路径之间确定性延迟,所有JESD204B通道同步在一起以满足确定性延迟要求,此功能应在所有收发器初始化后运行。
通过SPI 控制AD9528 发送 SYSREF 脉冲,发送SYSREF脉冲后,再次调用MYKONOS_enableMultichipSync 函数,将enableMcs参数设置为0,读取MCS状态
1 使用Mykonos_Initialize 初始化系统中的所有Mykonos
2 使用enableMcs=1 ,运行 MYKONOS_enableMultichipSync
3 发送至少3个SYSREF脉冲
4 使用enableMcs=0,运行 MYKONOS_enableMultichipSync
5 加载ARM
MYKONOS_enableMultichipSync(&mykDevice, 1,&mcsStatus)AD9528_requestSysref(clockAD9528_device, 1);AD9528_requestSysref(clockAD9528_device, 1);AD9528_requestSysref(clockAD9528_device, 1);MYKONOS_enableMultichipSync(&mykDevice, 0,&mcsStatus)
6.5 初始化ARM处理器、加载ARM二进制文件、读取AD9371 ARM版本
MYKONOS_initArm(&mykDevice)MYKONOS_loadArmFromBinary(&mykDevice,&firmware_Mykonos_M3_bin[0], firmware_Mykonos_M3_bin_len)MYKONOS_getArmVersion(&mykDevice, &arm_major, &arm_minor, &arm_release, NULL)
6.6 设置RF PLL频率、检查RF PLL锁定状态
对使用的每个通道设置RF频率
MYKONOS_setRfPllFrequency(&mykDevice, RX_PLL,mykDevice.rx->rxPllLoFrequency_Hz)) MYKONOS_setRfPllFrequency(&mykDevice, TX_PLL,mykDevice.tx->txPllLoFrequency_Hz))MYKONOS_setRfPllFrequency(&mykDevice, SNIFFER_PLL,mykDevice.obsRx->snifferPllLoFrequency_Hz))MYKONOS_checkPllsLockStatus(&mykDevice,&pllLockStatus)
6.7 设置AD9371 GPIO
根据所需的配置设置GPIO
mykGpioErr = MYKONOS_setRx1GainCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setRx2GainCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setTx1AttenCtrlPin(&mykDevice, 0, 0, 0, 0, 0)mykGpioErr = MYKONOS_setTx2AttenCtrlPin(&mykDevice, 0, 0, 0, 0)mykGpioErr = MYKONOS_setupGpio(&mykDevice))
6.8 设置 RX、Obs 和 SNIFFER 手动增益 和 TX 衰减
MYKONOS_setRx1ManualGain(&mykDevice, 255)MYKONOS_setObsRxManualGain(&mykDevice, OBS_RX1_TXLO, 255)MYKONOS_setObsRxManualGain(&mykDevice, OBS_SNIFFER_A, 255)MYKONOS_setTx1Attenuation(&mykDevice, 10000);MYKONOS_setTx2Attenuation(&mykDevice, 10000);
6.9 运行初始化校准,等待初始化校准完成
uint32_t initCalMask = TX_BB_FILTER | ADC_TUNER | TIA_3DB_CORNER | DC_OFFSET |TX_ATTENUATION_DELAY | RX_GAIN_DELAY | FLASH_CAL |PATH_DELAY | TX_LO_LEAKAGE_INTERNAL | TX_QEC_INIT |LOOPBACK_RX_LO_DELAY | LOOPBACK_RX_RX_QEC_INIT |RX_LO_DELAY | RX_QEC_INIT ;* calMask Bit | Calibration* ------------|----------------------* 0 | Tx BB Filter* 1 | ADC Tuner* 2 | TIA 3dB Corner* 3 | DC Offset* 4 | Tx Attenuation Delay* 5 | Rx Gain Delay* 6 | Flash Cal* 7 | Path Delay* 8 | Tx LO Leakage Internal* 9 | Tx LO Leakage External* 10 | Tx QEC Init* 11 | LoopBack Rx LO Delay* 12 | LoopBack Rx Rx QEC Init* 13 | Rx LO Delay* 14 | Rx QEC Init* 15 | DPD Init* 16 | Tx CLGC (Closed Loop Gain Control)* 17 | Tx VSWR InitMYKONOS_runInitCals(&mykDevice,(initCalMask & ~TX_LO_LEAKAGE_EXTERNAL)MYKONOS_waitInitCals(&mykDevice, 60000, &errorFlag,&errorCode))
6.10 (可选,例程未使用)使用PA进行初始化外部LOL校准
确保此时PA已启用
MYKONOS_runInitCals(&mykDevice,TX_LO_LEAKAGE_EXTERNAL)MYKONOS_waitInitCals(&mykDevice, 60000, &errorFlag, &errorCode)
未完,见下一节
这篇关于AD9371 官方例程 NO-OS 主函数 headless 梳理(一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


