本文主要是介绍Ubuntu16.04+ROS下,安装镭神智能科技LS01B激光雷达,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
rt,新来了个雷达,肯定要先玩一玩~
官方给的教程
CSDN查的教程
CSDN教程:ROS下用LS01B镭神智能雷达代替思岚雷达的教程
**
我自己的教程
**
跟官方大同小异,不过我是新手,所以想写的更详细点,给我和我一样的新手有一个指引~
以已安装好ros系统的ubuntu为例:
tips:本机之前安装了思岚的。以及改了思岚rplidar.launch文件被我替换镭神ls01b_v2.launch的内容了,不过没用上,我也说不准这个修改到底是有没有用的- -、
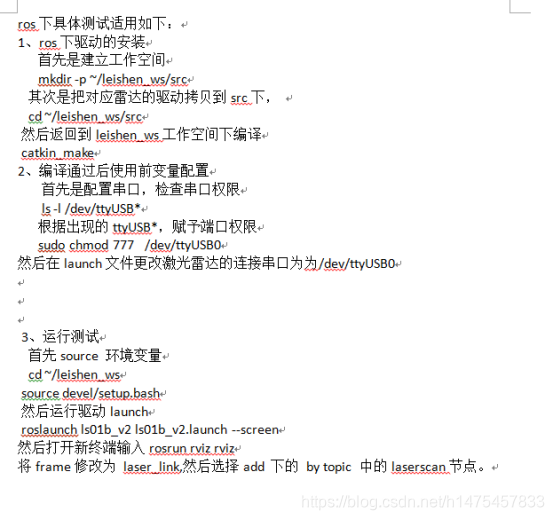
1.新建工作空间
不知道为啥mkdir的文件夹总是编译错误,所以我是直接在文件夹建的
 home下建文件夹
home下建文件夹

叫 ls01b(雷达型号)
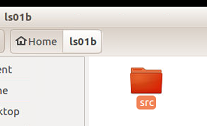
在 ls01b 下建 src 文件夹
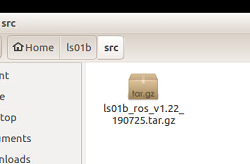
把官方给的压缩包解压到 src 中
在 ls01b 打开终端,编译工作空间
catkin_make
检查串口
插上你的雷达
检查串口哪个被占用,这个要一个个拔插看看你的小雷达插的是哪个usb口。
ls -l /dev/ttyUSB*
//检查单个串口占用,*代表的是端口号

我这里是用的ttyUSB1
赋予 ttyUSB1 端口权限
sudo chmod 777 /dev/ttyUSB*
//赋予端口*权限,记得改*!!!

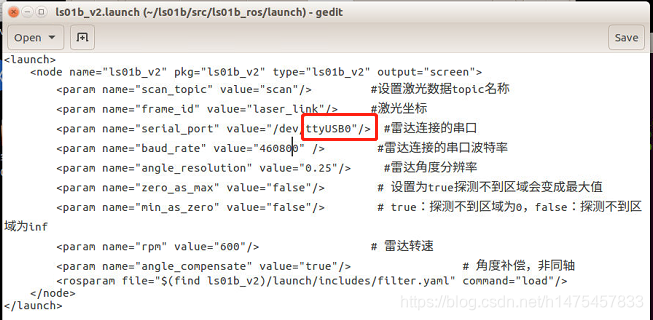
在刚刚的 ls01b 文件中找到对应的镭神雷达launch文件,我的目录地址为:
修改雷达连接串口为/dev/ttyUSB*
我这里是改之前截屏的emm
运行测试
先source环境变量
cd ~/ls01b/
source devel/setup.bash
然后运行launch文件的驱动,可以在ls01b_v2后按两次“tab”键,就会弹出launch文件,如果没有,那就是没有该文件,大概率你编译空间没完成或者包缺失,重新更换包或者编译就好。
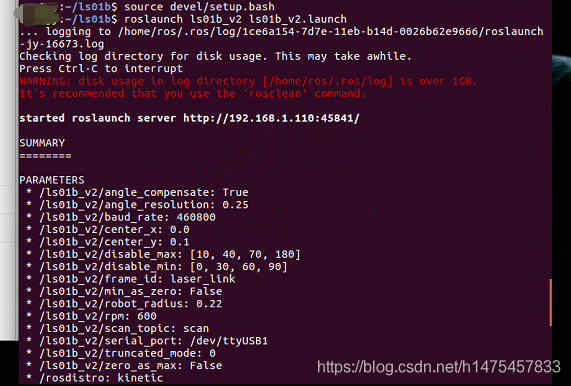
roslaunch ls01b_v2 ls01b_v2.launch
运行完这一步可以看见镭神雷达已经开始转起来了,内心肥肠激动~~
打开新终端输入
rosrun rviz rviz
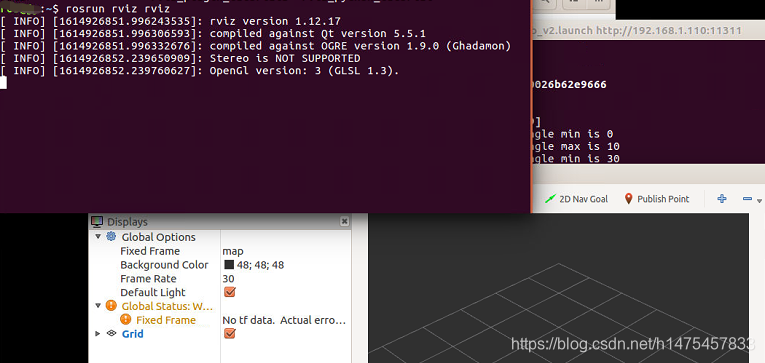
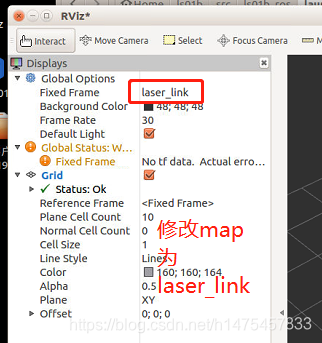
打开rviz,修改Fixed Frame(激光坐标)为laser_link。
可以看刚刚的镭神雷达launch文件。
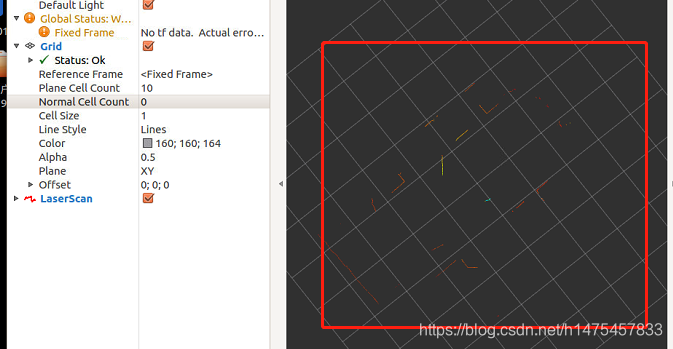
在rviz中添加lasercan节点
 添加完laserscan节点后,就有图像了~~
添加完laserscan节点后,就有图像了~~
到此完成~
这篇关于Ubuntu16.04+ROS下,安装镭神智能科技LS01B激光雷达的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








