本文主要是介绍QM UML状态机建模实例之Blinky for cortex-m0,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关注、星标公众号,直达精彩内容

来源:全然电子
整理:李肖遥
QP事件状态机框架论坛已经有很多教程了,加上已经有中文版本的书籍学习QP相对来说多花一些时间就能入门,有经验的攻城狮们可能忙于工作无法学习更多的技术,使用QP框架的好处可能仍不会让您动心,但是如果现在有一款能自动生成代码的图形编辑软件呢?是不是会有那么点心动,虽然不能完全脱离代码,但是至少应用层可以完全使用使用该软件来完成,我要推荐就是QM软件,一个基于QP框架UML语言的状态机图形编程软件,下面是我使用QM开发官方Blingy闪灯的基本教程。
简介
QP由Quantum Leaps公司开发异于传统顺序式系统(前后台架构即main+ISR)和传统多任务系统(操作系统)的事件驱动型状态机框架,实现了在C语言下的面向对象编程,该框架支持有限状态机FSM和层次式状态机HSM。
QP大体的框架如下图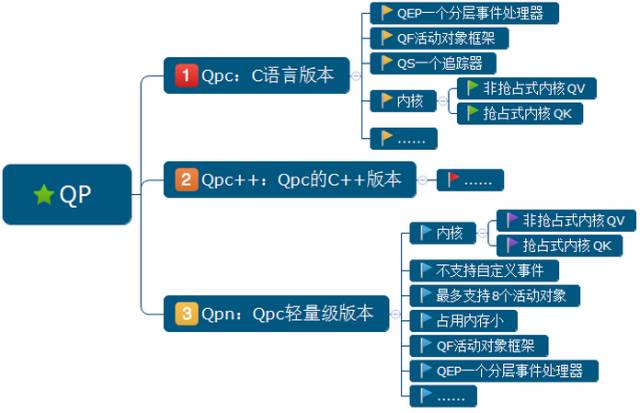
对于开发者使用该框架的开发步骤如下:
理解整个项目需求
顺序图,划分出具有行为的活动对象并且将系统的资源分配到各个活动对象中,降低对象间的耦合,整理出各个活动对象间的事件交换
信号和事件的枚举,各个活动对象间的事件交换和自身对象下的触发信号事件。信号是只有触发信号而事件是带有参数的信号触发例如串口接收不仅有串口接收这一触发事件并且还有与之一起的数据
各个活动对象下的具体状态机实现
初始化并启动应用程序 给事件列队分配内存,初始化活动对象分配优先级最后启动QP将系统控制权交给QP管理,QP则根据你的事件触发来执行各个活动对象下的状态机
调试
如下图所示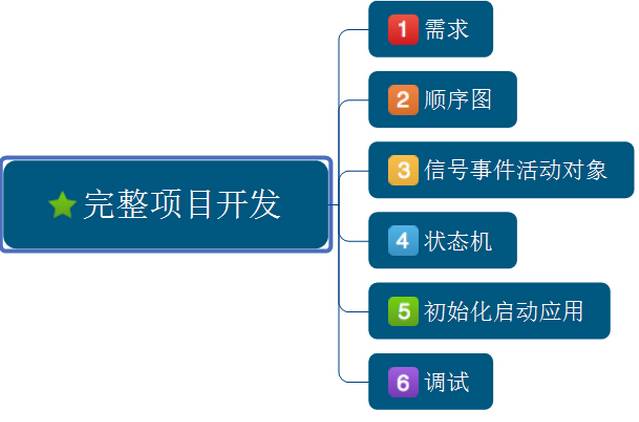
更多关于QP的资料请看点击http://www.state-machine.com/psicc2/index.html,里面有电子版本的PSiCC2-CN文档详细介绍了整个QP框架
QpNano
接下来简单介绍下QpNano,因为我的建模是使用QpNano,它是由事件驱动型框架下的裁剪版本,顾名思义,是针对资源有限的单片机。如低端的8位和16位单片机8051,PIC,AVR,MSP,STM8等当然也适应于32位处理器。
下面介绍如何在StateMachines板上运用QP官网上Blinky(闪灯)的例程之前简单介绍下StateMachines板的资源:
使用STM32F030C8T6 Cortex-m0处理器
板载按键、12864液晶屏、字库、数码管、串口转USB,LED灯
简单介绍完QP和QpNano后,下面才是我要重点推荐使用QP框架的原因。QP框架允许完全手工编程和使用自动生成代码工具QM。QM(QP™ Modeler)建模是基于QP框架和层次式状态机UML语言图形自动代码生成工具,可以在该软件下实现各个对象的状态机和事件交换,而状态机实现方式是使用UML图形,真正做到应用层使用图形编程,更适合我们的编程思维。
Blinky例程是一个LED闪灯程序,是学习QP、QM最基本的例程,以下是使用qm_3.3.0-win64下建立Blinky模型:
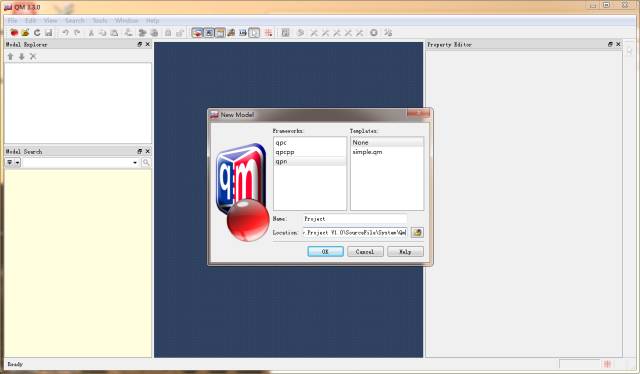
第一步在QM中新建工程
如下图所示在File菜单下点击New Modle新建一个QM工程,然后在弹出的页面Frameworks下选择使用qpn即qp-nano框架,Templates模板选择None,Name我暂且命名为Project,Location选择工程保存位置
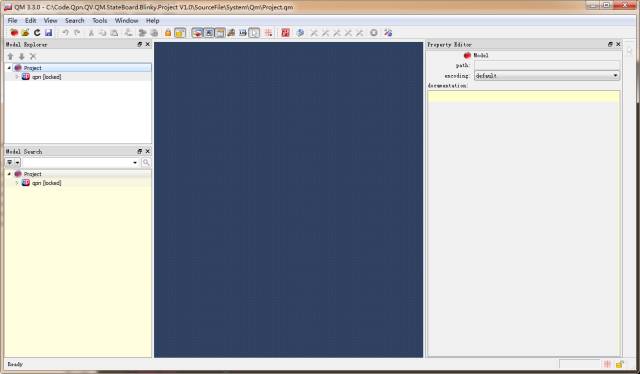
点击OK后可以看到已经生成了Project的项目如下图所示
第二步:建立对象
在上一步骤中生成的工程左上角Mode Explorer下Project处鼠标右键选择Add Package建立一个包,在Property Editor处nane命名为AOs, stereotype选择components如下图所示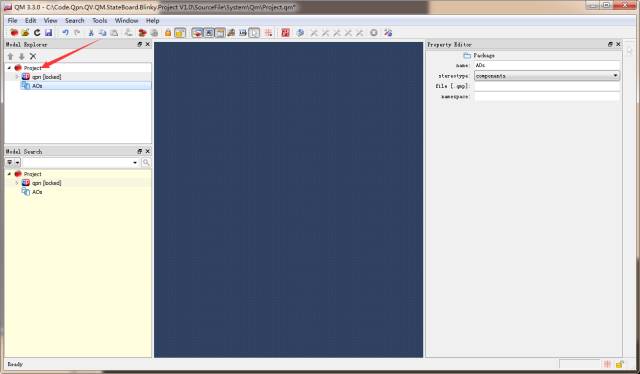
然后在AOs处鼠标右键选择Add Class建立一个类,在Property Editor处nane命名为Blinky, superclass 处选择qpn::QActive,如下图所示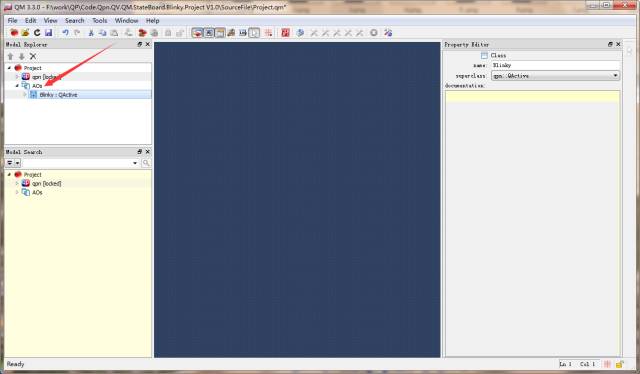
接着在AOs处鼠标右键选择Add Attribute增加属性,在Property Editor处nane处命名为AO_ Blinky,type为struct Blinky,即使Blinky类的具体实例对象
如下图所示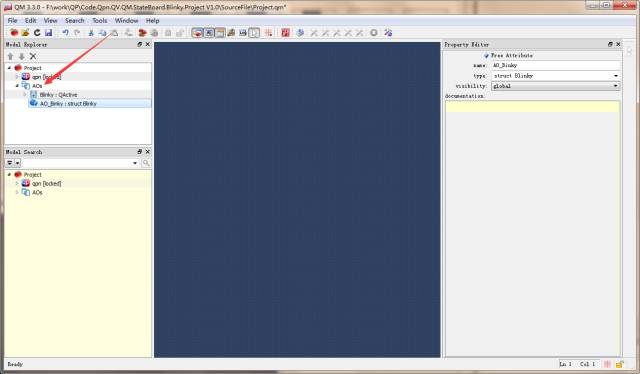
接着在AOs处鼠标右键选择Add Operation增加类构造,在Property Editor处
nane处命名为Blinky_Ctor
teturn type 选择void
在下方Code处具体添加代码构造
Blinky * const me = &AO_Blinky;
QActive_ctor(&me->super, Q_STATE_CAST(&Blinky_initial));
//是qpn框架自带的API函数用于类构造
Q_STATE_CAST(&Blinky_initial)是指定初始化状态为Blinky_initial
如图所示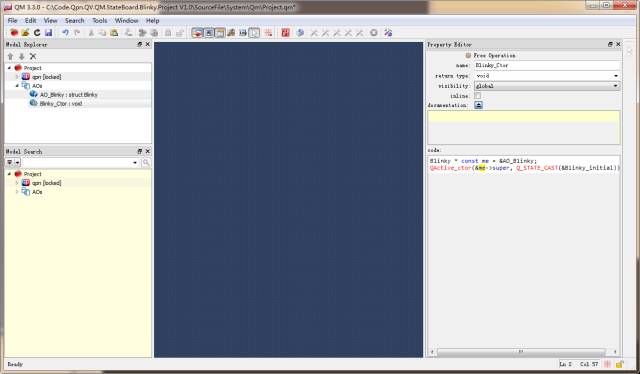
第三步:为对象建立状态机
在上一步骤的类Blinky处右键选择Add State Machine建立状态机,双击SM如下图所示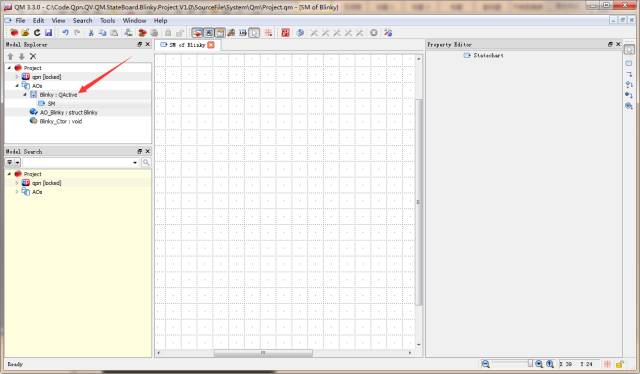
可以看到有会弹出SM of Blinky带有珊格的状态机工作区域,工作区域小大可由珊格最右下角拉伸。
第四步:画具体状态实现图
在上一步骤中已经在类里新建了一个状态机,下面需要实现具体的状态图。
闪灯程序非常简单,LED有两种状态即亮与灭,互相触发的事件为延时。亮与灭的两种状态只要等待延时事件,延时事件一旦触发就执行亮灯灭灯的动作。
如下图所示在右方有一个小宽框即为状态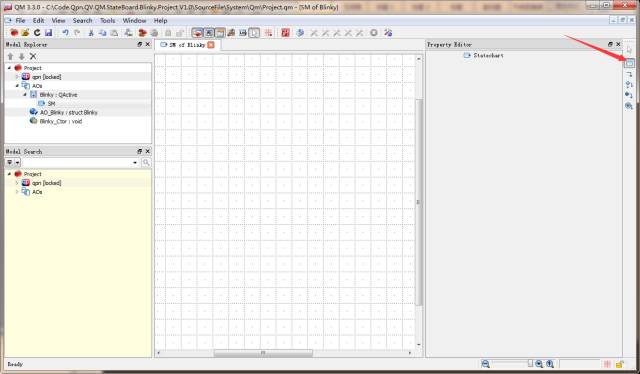
点击该状态图标到珊格工作区域建立一个状态,在Property Editor属性编辑name处命名为LedOn如下图所示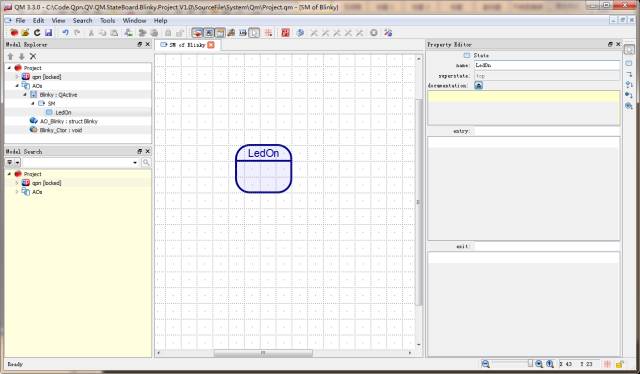
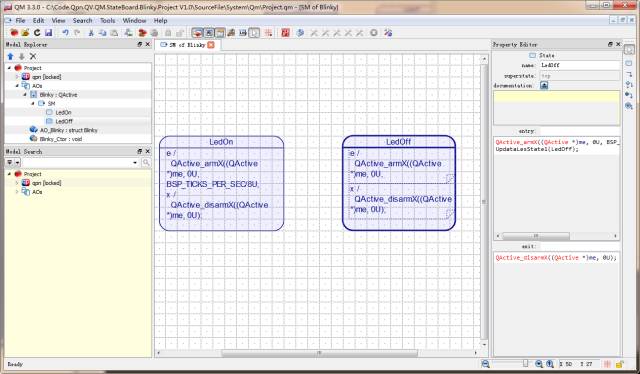
同样的方法建立第二个状态LedOff,如下图所示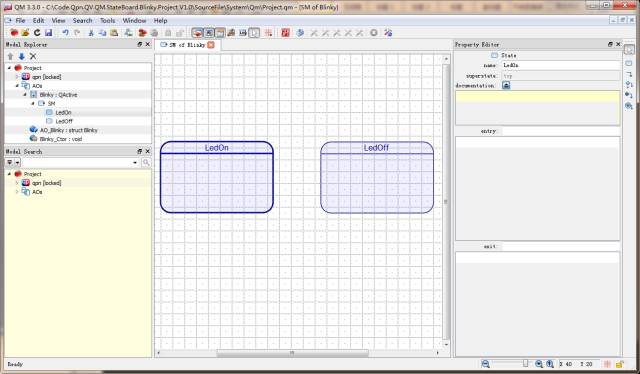
然后点击LedOn该状态图,在Property Editor属性编entry状态机进入事件处理中加入代码
QActive_armX((QActive *)me, 0U, BSP_TICKS_PER_SEC/8U, 0);
和Led改变状态函数UpdataLesState(LedOn);
在exit状态机退出事件中加入代码
QActive_disarmX((QActive *)me, 0U);
QActive_armX((QActive *)me, 0U, BSP_TICKS_PER_SEC/8U, 0)是qpn框架提供的API函数,用于产生(BSP_TICKS_PER_SEC/8U)个Tick延时,BSP_TICKS_PER_SEC是板子定义每秒多少个Tick,即心跳时钟。
QActive_disarmX((QActive *)me, 0U); 也是qpn框架系统提供的API函数,用于取消延时
相同的方法LedOff也是如此,将entry事件Led执行状态改为LedOff即可。
如下图所示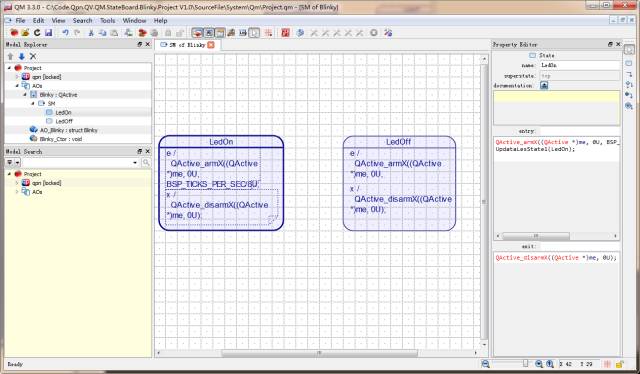
接下来就要使两个状态建立转换了同样在右方状态机图标下方有一个Transition图标表示状态转换迁移。
从LedOn状态转换到LedOff状态是延时事件,因为qpn框架提供了延时事件的枚举为Q_TIMEOUT,可以直接使用。
点击图标,从LedOn拉伸至LedOff状态,并在属性编辑里trigger触发为Q_TIMEOUT如下图所示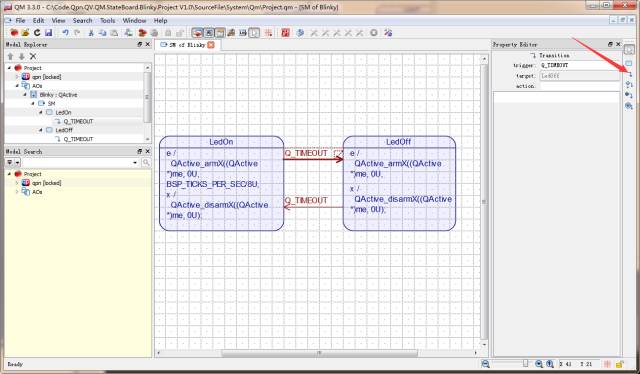
最后需要为该对象下的状态机指定一个初始化转移,即初始化转换到哪一个状态
点击右方图标Initial Transition指定为转换到LedOn状态如下图所示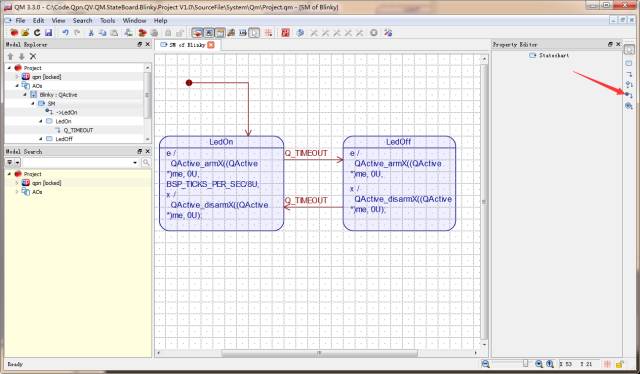
第五步:生成C代码
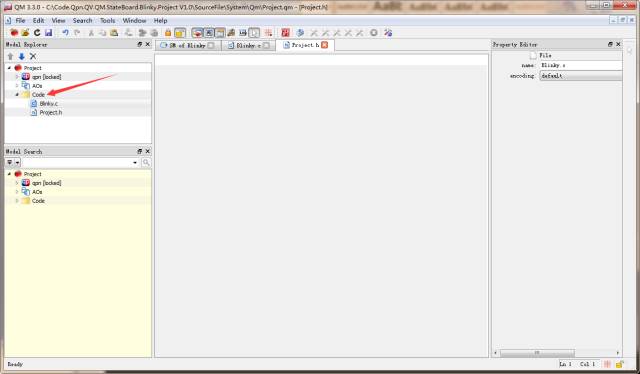
首先需要为对象建立一个文件声明和定义对象,在Model Explorer中鼠标右键选择Add Directory,在Property Editor属性中path指定目录我命名为Code(默认是在建立工程文件目录下)
然后在Model Explorer可以看到Code选项右键选择Add File,并在Property Editor属性name中命名为Blinky.c
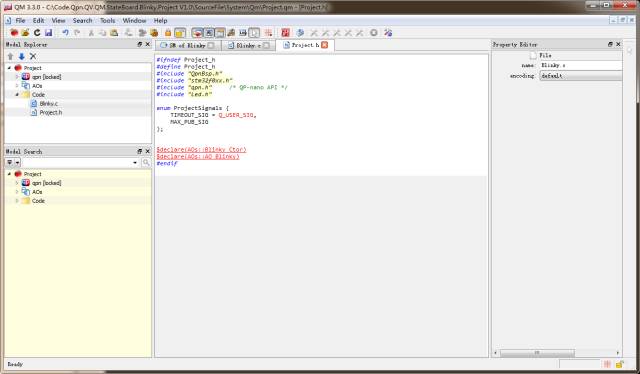
同样的方法建立文件Project.h主要用于事件枚举、包含外部使用到的.h文件、外部声明对象。
如下图所示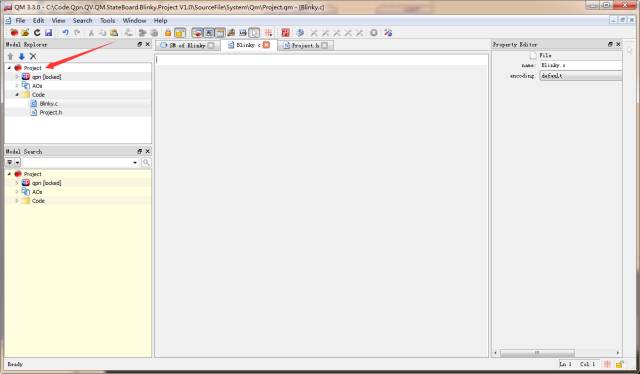
接着在Blinky.c中定义和声明Blinky对象和初始化,QM中有以下代码生成指令
$declare() 声明
$define() 定义
如图所示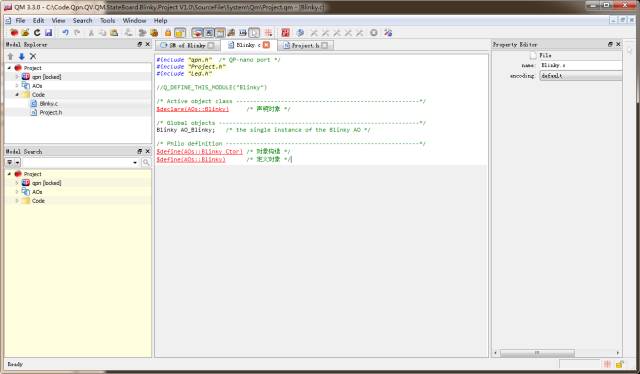
最后点击工具栏Tools选择Generate Code或直接按F7生成C代码
第六步:将QM生成代码加入到项目工程中
首先需要将qpn移植到STM32F030中,我使用qpn合作式内核,只需要在SysTick_Handler加入qpn 定时服务API QF_tickXISR(0)并在QF_onStartup()函数中加入SysTick配置中断时间和优先级。
如图所示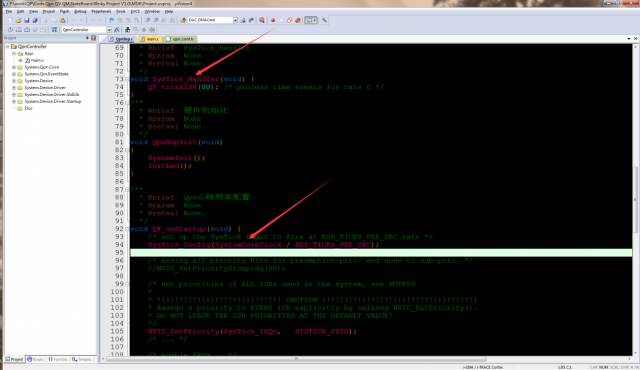
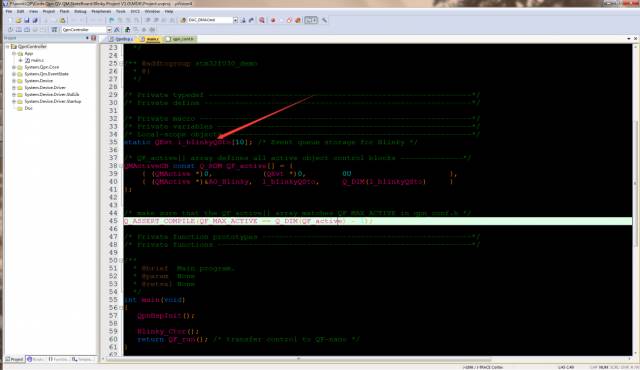
然后需要为Blinky对象分配事件队列内存,并制定整个项目中所使用到的活动对象个数本例程只有一个在#include "qpn_conf.h" 宏定义QF_MAX_ACTIVE配置。
如图所示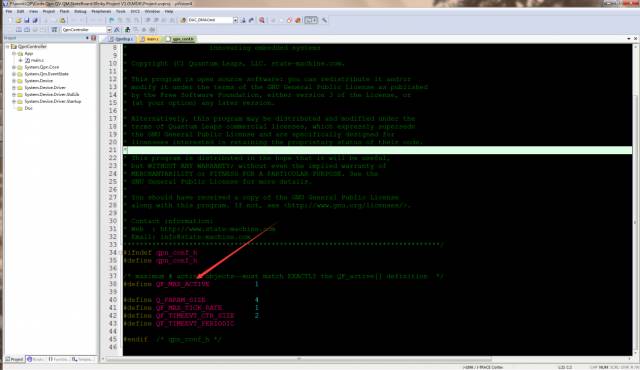
整个Blinky QM建模由
第一步在QM中新建工程
第二步:建立对象
第三步:为对象建立状态机
第四步:画具体状态实现图
第五步:生成C代码
第六步:将QM生成代码加入到项目工程中
介绍完成,看起来一个非常简单的闪灯程序由QM生成非常耗时,不如自己敲几行代码来的快,但这是飞跃,逻辑代码层完全由图形实现,意味着以后不同复杂的项目都可以使用图形来管理并且图形比起代码来说更加易懂和维护,图形编程是以后的方向。
版权归原作者所有,如有侵权,请联系删除。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读:
嵌入式编程专辑Linux 学习专辑C/C++编程专辑
Qt进阶学习专辑
关注我的微信公众号,回复“加群”按规则加入技术交流群。
点击“阅读原文”查看更多分享。
这篇关于QM UML状态机建模实例之Blinky for cortex-m0的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





