本文主要是介绍Gazebo新环境AWS RoboMaker Hospital医院场景适用于ROS1和ROS2,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Gazebo对机器人开发环境支持逐步完善,并迭代出新版本Ignition,具体参考如下链接:
-
Ignition Robotics和ROS2 Foxy简明使用说明(ros_ign)
Gazebo成为Igniton的组件之一,并增加丰富插件提高机器人仿真的调试效率。
这里举个例子:
柔性的窗帘,可以启用风(wind)属性:
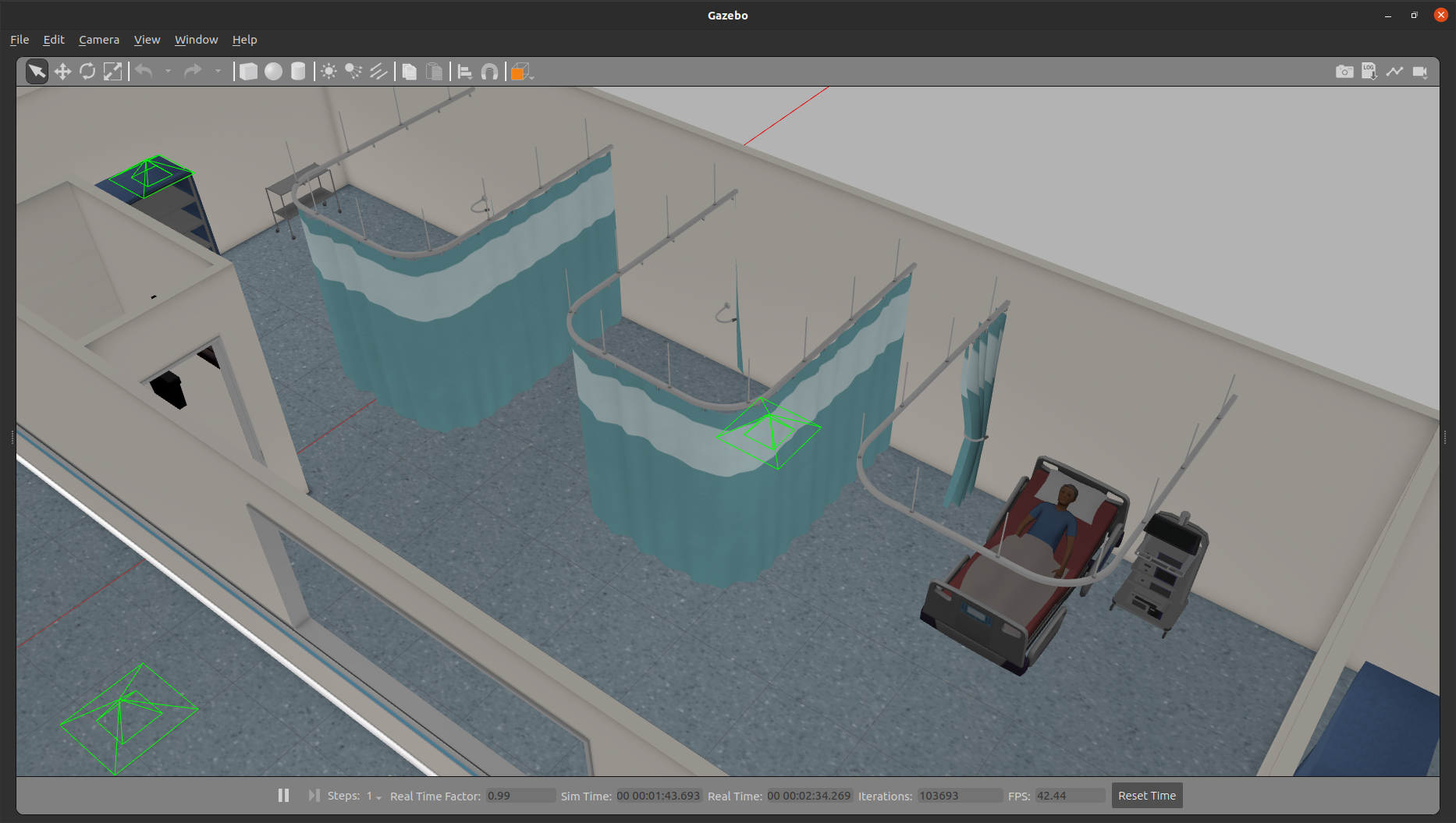
窗帘也可以设置各类属性。
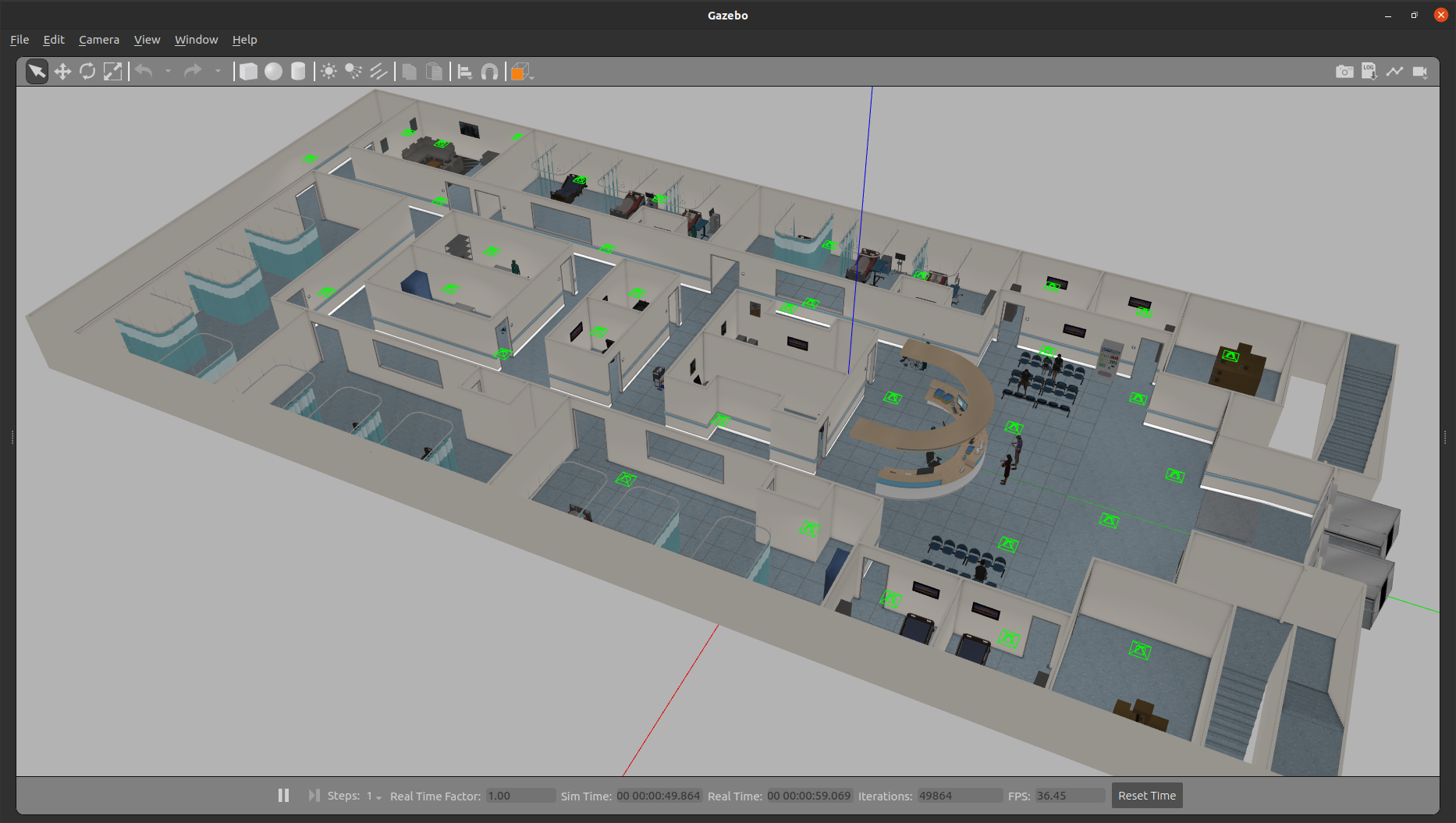
当然医院也有一层和双层两种示例提供学习和使用。
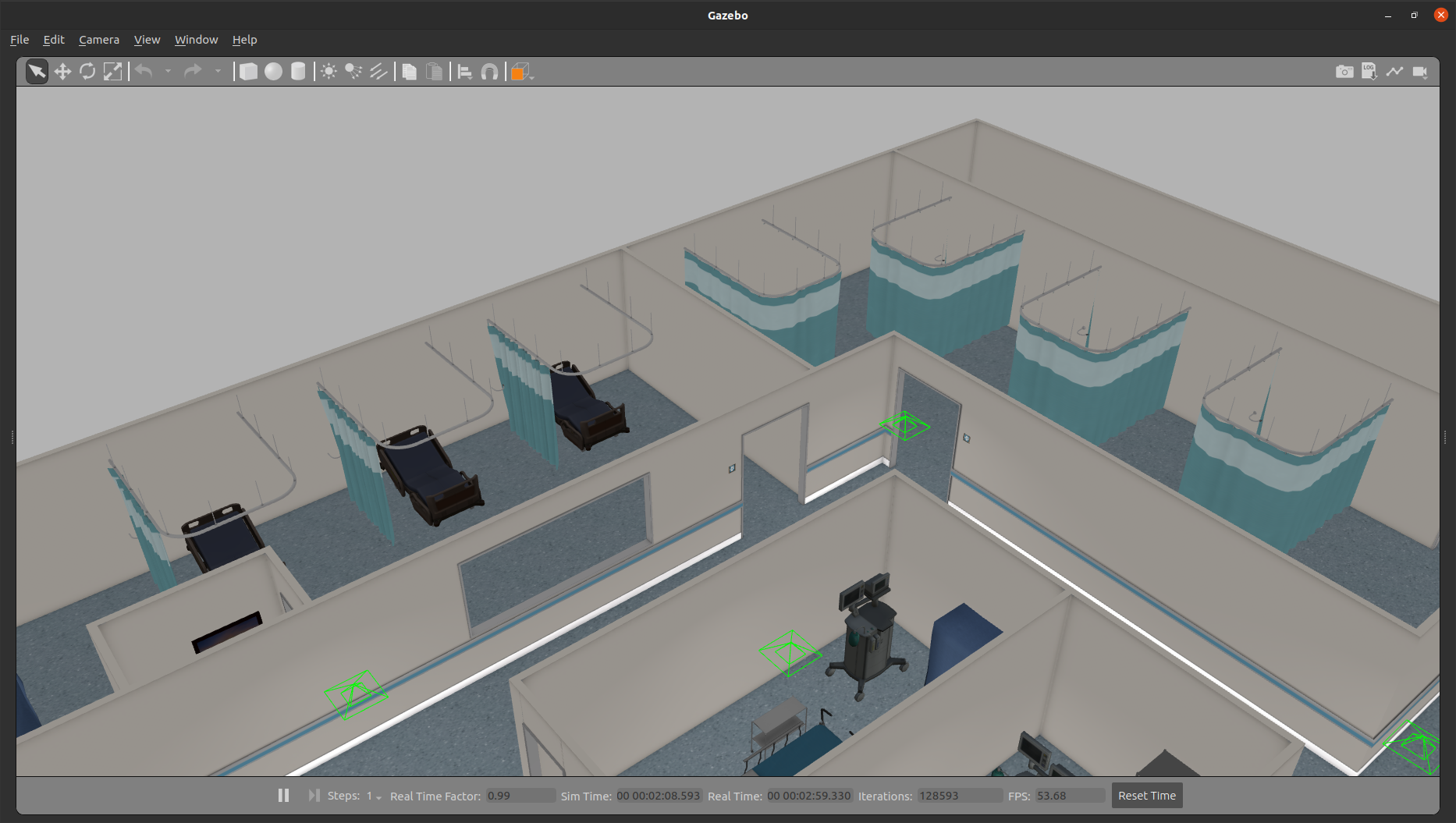
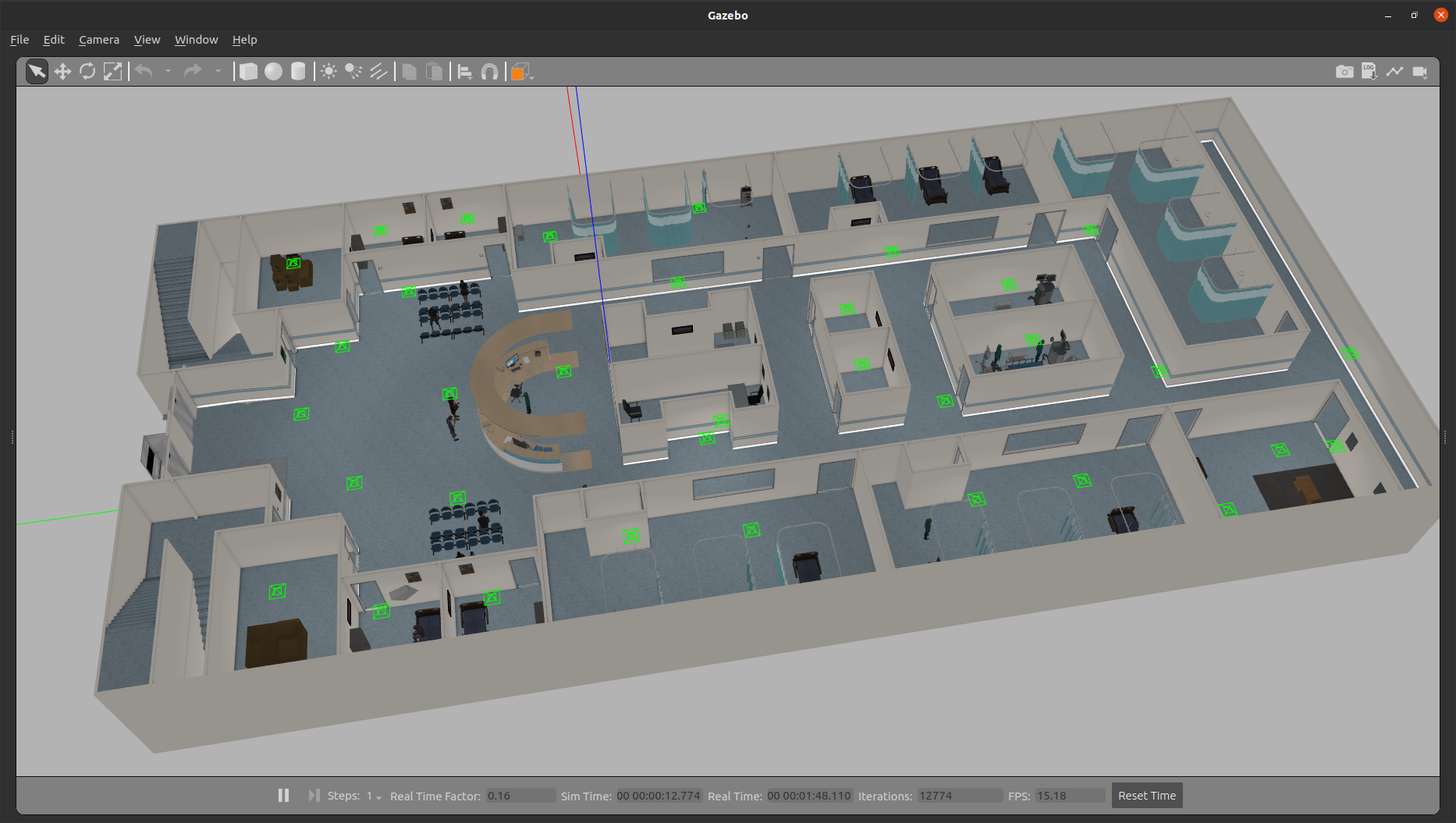
1全景:
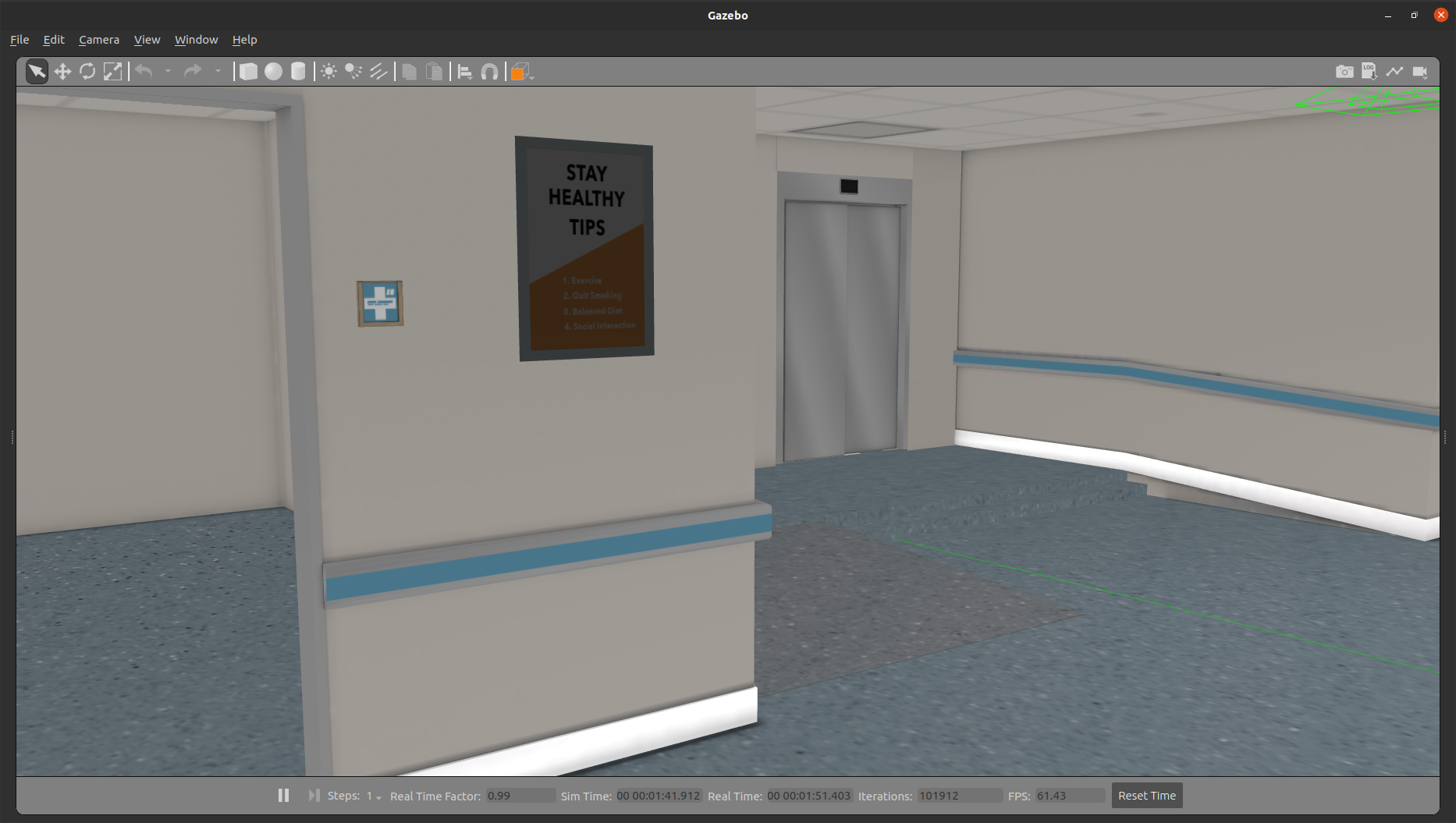
1细节:
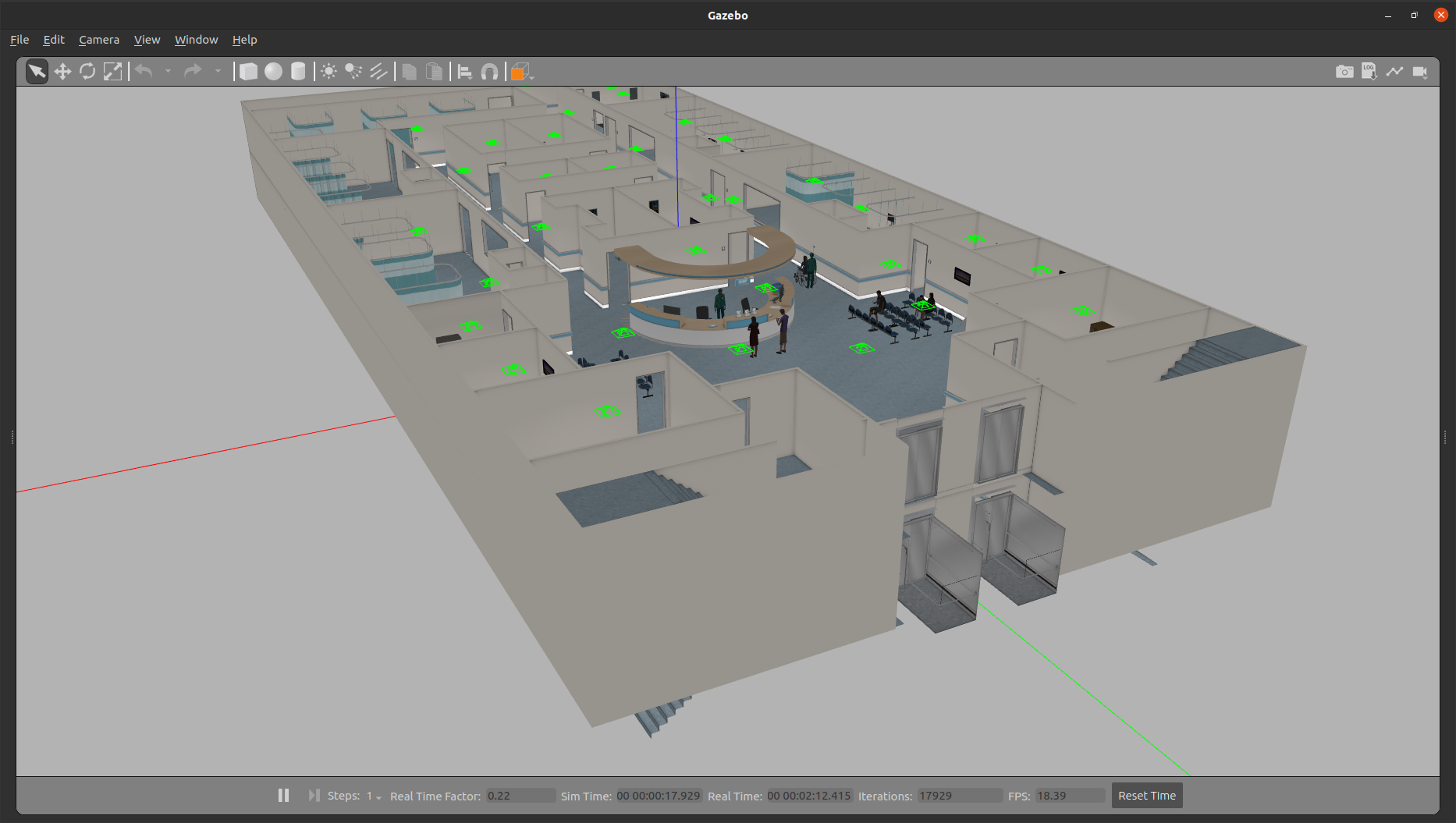
2全景:
2细节:
两层模型一致。

更多功能查看模型代码和开源文件即可:
ros1:roslaunch
ros2:ros2 launch
这篇关于Gazebo新环境AWS RoboMaker Hospital医院场景适用于ROS1和ROS2的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







