本文主要是介绍飞行机器人(二)DJI平台软硬件连接,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
第一章 飞行机器人(一)DJI平台OSDK简介飞行机器人(一)DJI平台OSDK简介_Techblog of HaoWANG-CSDN博客DJI OSDK/OSDK-ROS for M600Pro技术文档 Version 2.1.1https://haowang.blog.csdn.net/article/details/122336345
目录
系列文章目录
1. 机载设备USB2TTL串口接线方法
2. OSDK 源码编译
3. catkin_make编译osdk_ros3.8.1
4. OSDK版本
1. 机载设备USB2TTL串口接线方法
(#更新 2021-12-17 端口配置与硬件连接)
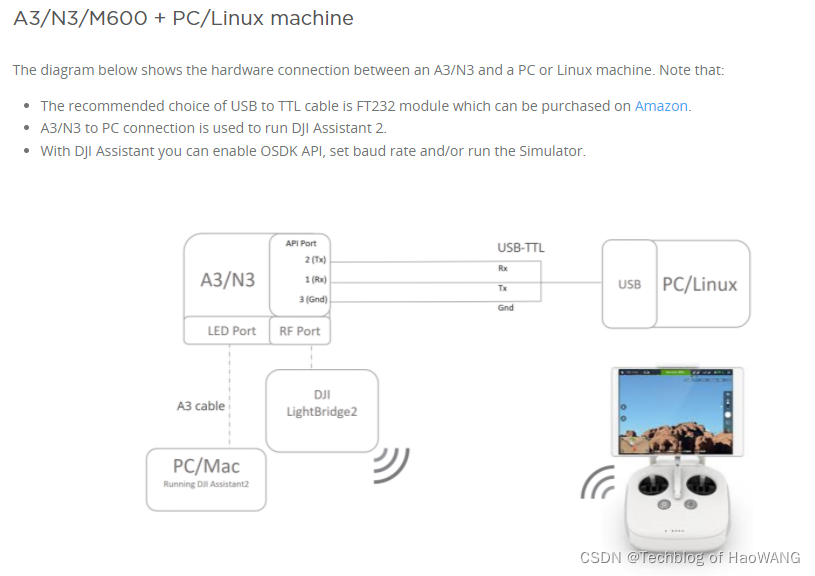
- 连接windows电脑usb,进而利用Assistant2 - M来进行执行仿真模拟;
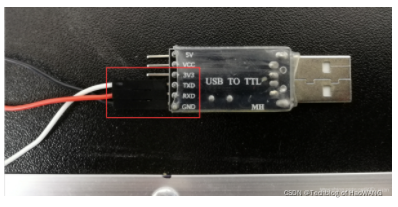
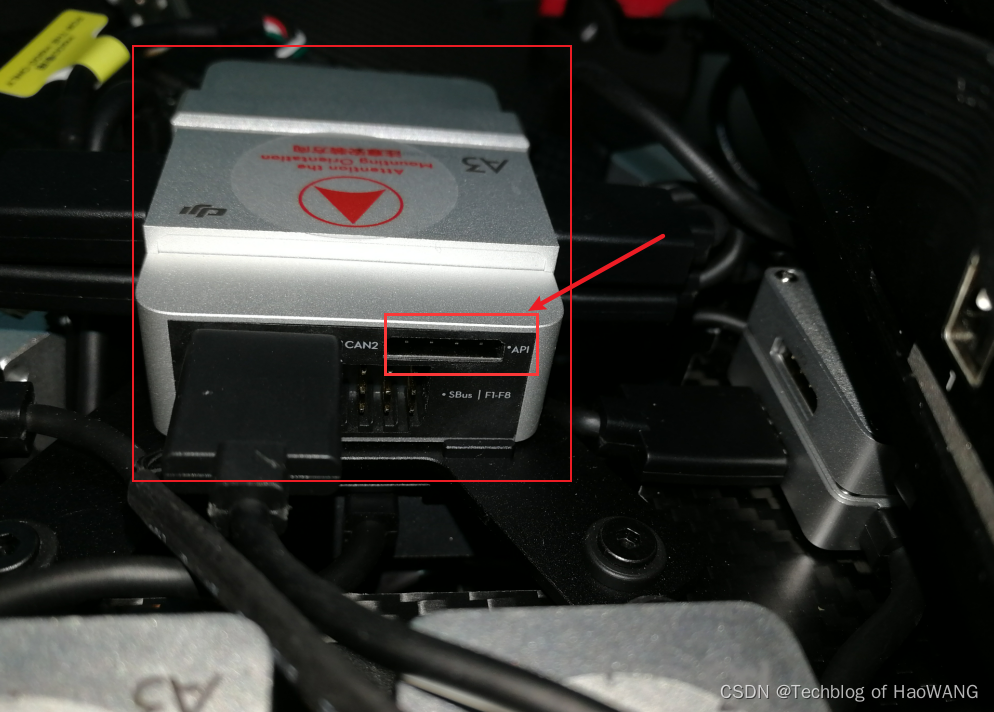
- 使用USB-TTL的转接线才能连接到Ubuntu 机载计算设备(Jetson Xavier NX)的USB插口上;
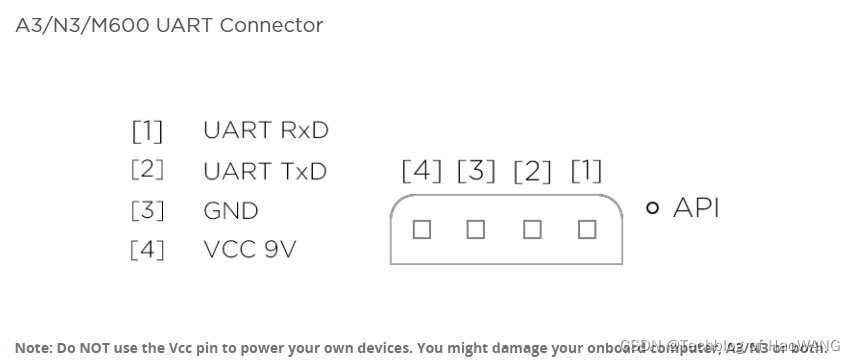
USB2TTL


C. Ubuntu机载设备USB2TTL连接M600Pro A3 Pro飞控串口
查看USB2TTL端口地址:
ls /dev/ttyUSB*
/dev/ttyUSB0,注意:由于jetson xavier xn上位机的USB串口设备不止一个,具体的端口地址 /dev/ttyUSBX必须以具体的物理器件地址编号为准。
修改usb端口方法:
Linux系统固定USB串口设备名称_WCH_TechGroup的博客-CSDN博客_linux串口设备名称

ttyUSB端口永久权限设置:
参考Linux设置串口永久权限_氢键H-H-CSDN博客_linux串口权限永久
- 单次获取端口权限
$ sudo chmod 777 /dev/ttyUSB0
- 永久获取端口权限
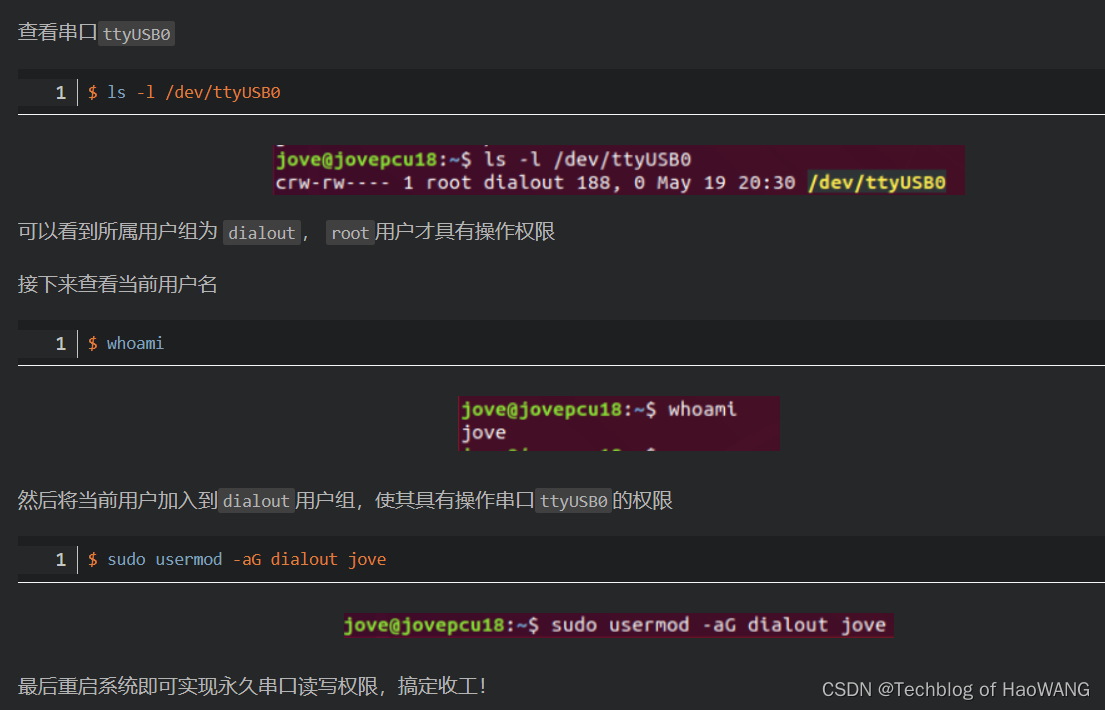
$ ls -l /dev/ttyUSB0
$ whoami
$ sudo usermod -aG dialout {userName}
重启系统,端口永久权限即可生效。
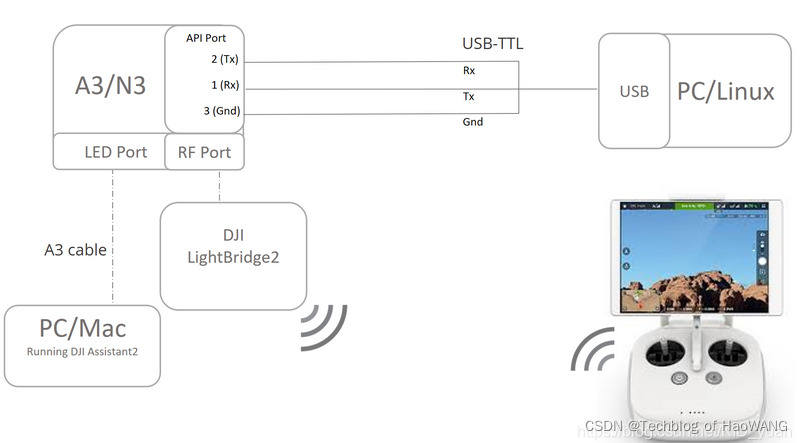
D. WIN连接飞行器平台调参端口,Linux上位机直连飞控通信端口

注意事项:
①最好跑程序的时候就提前将遥控器打开,并拨到F挡位。注意把无人机旋翼收起来(尽管它也飞不起来)
②使用Onboard SDK前,注意将Ubuntu(执行时不需联网,但是下载onboardSDK时需要联网)通过USB-TTL连接A3飞控,遥控器连接手机,手机连网,windows电脑(联网)连接Micro-USB,首次执行Samples时会在软件DJI Assistant2上面要登陆进行激活。
③注意在Windows电脑下打开Assistant2时选择SDK,并勾选启动API控制,波特率调整和上面UserConfig.txt中填写的一致。调完波特率之后需重新启动一下无人机A3飞控。
2. OSDK 源码编译
编译&安装OSDK 4.1.0版本不兼容 M600
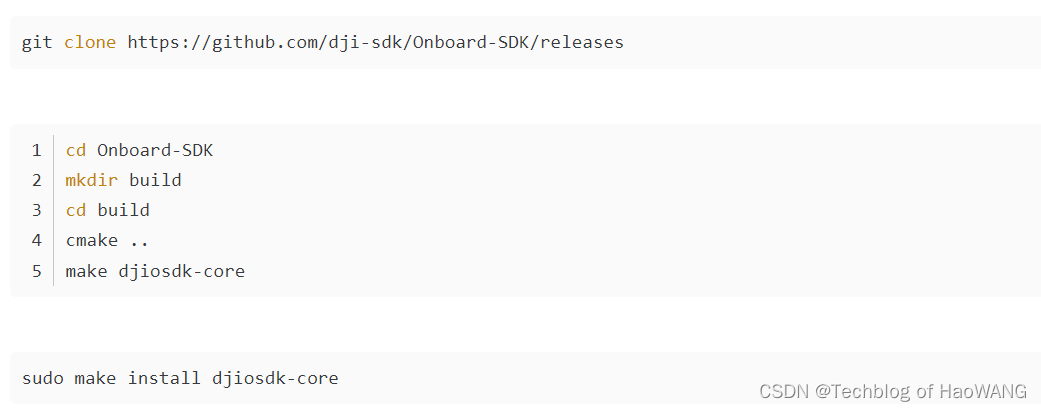
- 删除旧版本文件
Sudo xargs rm < install_manifest.txt
获取OSDK App
开始使用OSDK - DJI Onboard SDK Documentation  https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/integrateOSDK.html
https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/integrateOSDK.html
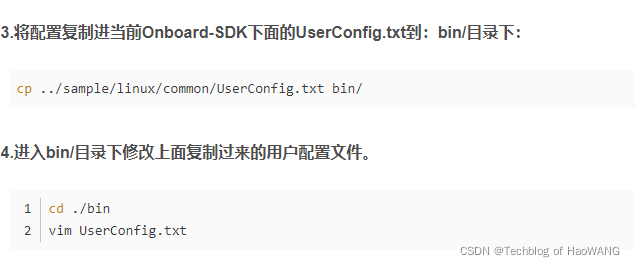
- 编辑UserConfig.txt
3. catkin_make编译osdk_ros3.8.1
dji_sdk_node.launch文件
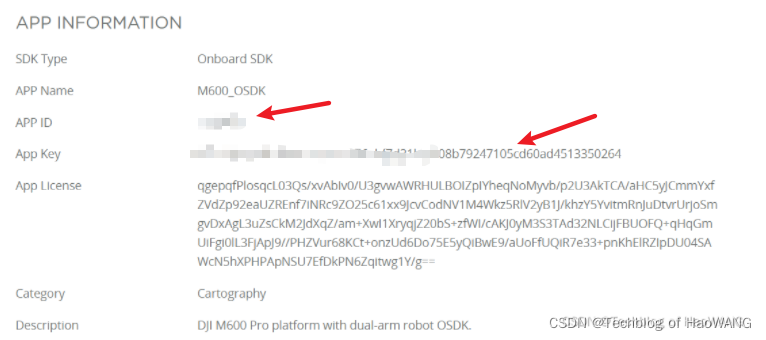
<launch><node pkg="dji_osdk_ros" type="dji_sdk_node" name="dji_sdk" output="screen"><!-- node parameters --><param name="acm_name" type="string" value="/dev/ttyACM0"/><param name="serial_name" type="string" value="/dev/ttyUSB0"/><param name="baud_rate" type="int" value="921600"/><param name="app_id" type="int" value= "12345"/><param name="app_version" type="int" value="1"/><param name="align_time" type="bool" value="false"/><param name="enc_key" type="string" value="abc123"/><param name="use_broadcast" type="bool" value="false"/><param name="dxc" type="bool" value="false"/></node></launch>- 配置APP id & Key
app_id : app_key : device : /dev/ttyUSB0baudrate : 921600acm_port : /dev/ttyACM04. OSDK版本
3.9.0版本
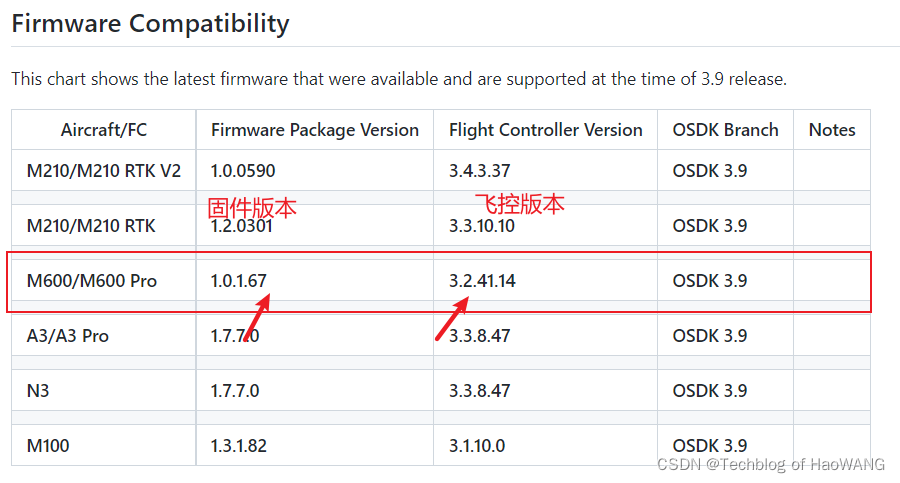
OSDK版本-3.8.1
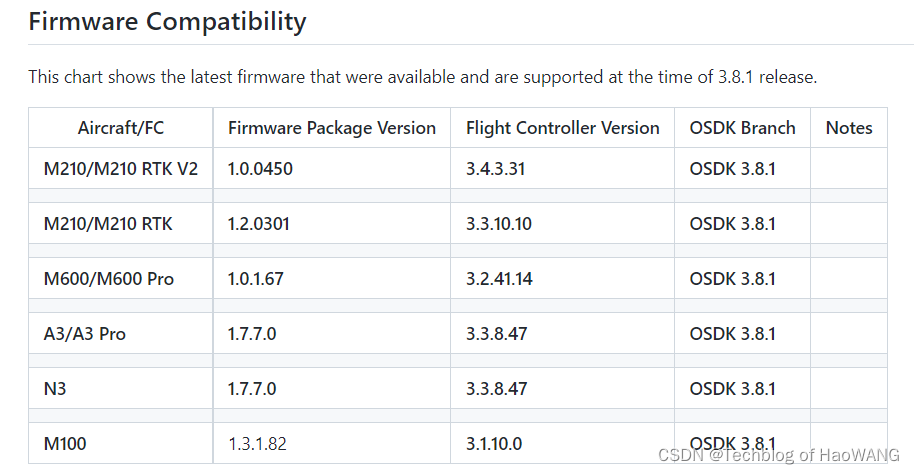
RELEASE NOTEs for OSDK 3.9.0 and OSDK 3.8.1

DOC dji_sdk - ROS Wiki
ENU Doc : Coordinate Systems
这篇关于飞行机器人(二)DJI平台软硬件连接的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








