本文主要是介绍NNDL 实验六 卷积神经网络(2)基础算子,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
5.2 卷积神经网络的基础算子
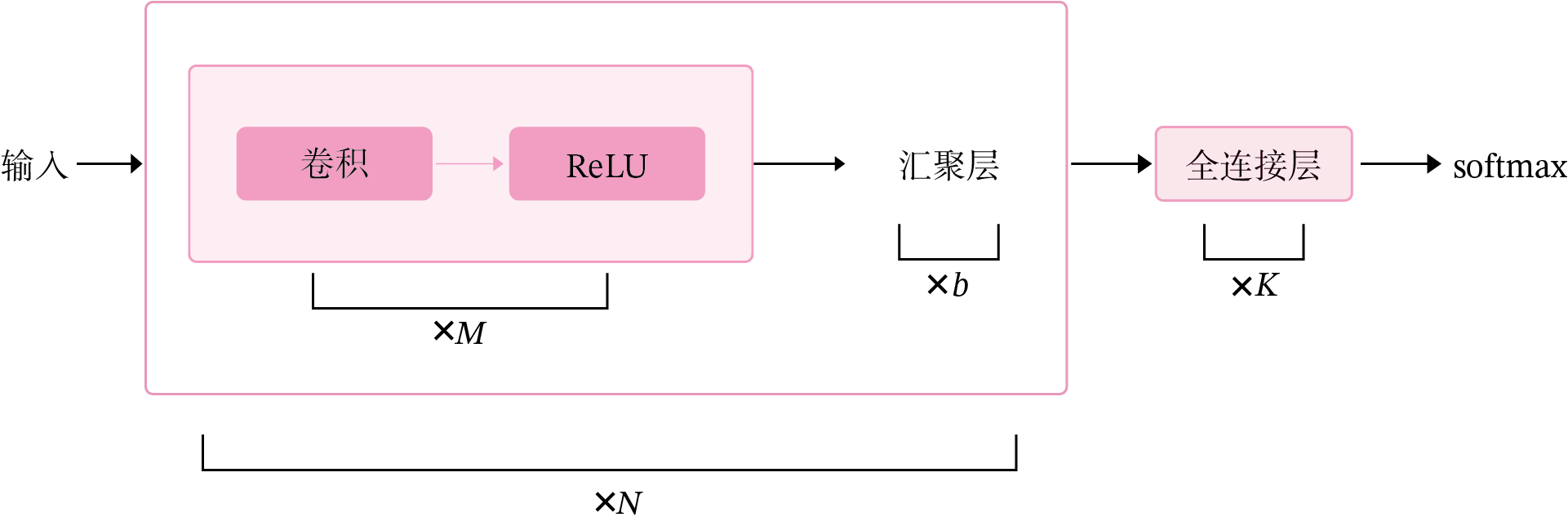
我们先实现卷积网络的两个基础算子:卷积层算子和汇聚层算子。
5.2.1 卷积算子
卷积层是指用卷积操作来实现神经网络中一层。
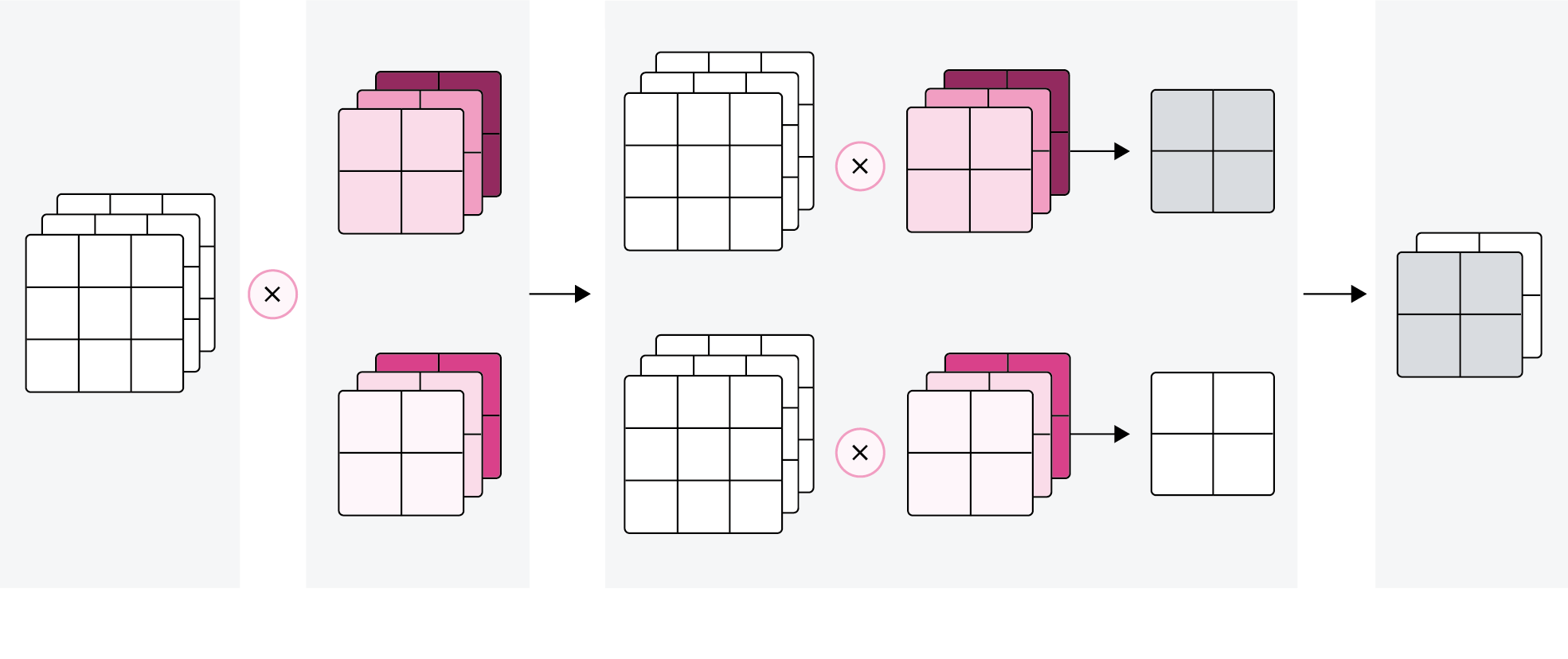
为了提取不同种类的特征,通常会使用多个卷积核一起进行特征提取。
5.2.1.1 多通道卷积

5.2.1.2 多通道卷积层算子
1. 多通道卷积卷积层的代码实现
2. Pytorch:torch.nn.Conv2d()代码实现
3. 比较自定义算子和框架中的算子
import torch
import torch.nn as nnclass Conv2D(nn.Module):def __init__(self, in_channels, out_channels,kernel_size,stride=1, padding=0,):super(Conv2D, self).__init__()# 使用'paddle.create_parameter'创建卷积核# 使用'paddle.ParamAttr'进行参数初始化weight_attr=torch.ones(out_channels,in_channels,kernel_size,kernel_size);bias_attr=torch.ones(out_channels,1);nn.init.constant_(weight_attr,1.0)nn.init.constant_(bias_attr, 0.0)self.weight = nn.Parameter(weight_attr)self.bias = nn.Parameter(bias_attr)# 步长self.stride = stride# 零填充self.padding = padding# 输入通道数self.in_channels = in_channels# 输出通道数self.out_channels = out_channelsdef single_forward(self, X, weight):# 零填充new_X = torch.zeros([X.shape[0], X.shape[1] + 2 * self.padding, X.shape[2] + 2 * self.padding])new_X[:, self.padding:X.shape[1] + self.padding, self.padding:X.shape[2] + self.padding] = Xu, v = weight.shapeoutput_w = (new_X.shape[1] - u) // self.stride+1output_h = (new_X.shape[2] - v) // self.stride+1output = torch.zeros([X.shape[0], output_w, output_h])for i in range(0, output.shape[1]):for j in range(0, output.shape[2]):output[:, i, j] = torch.sum(new_X[:, self.stride * i:self.stride * i + u, self.stride * j:self.stride * j + v] * weight,axis=[1, 2])return outputdef forward(self, inputs):"""输入:- inputs:输入矩阵,shape=[B, D, M, N]- weights:P组二维卷积核,shape=[P, D, U, V]- bias:P个偏置,shape=[P, 1]"""feature_maps = []# 进行多次多输入通道卷积运算p = 0for w, b in zip(self.weight, self.bias): # P个(w,b),每次计算一个特征图Zpmulti_outs = []# 循环计算每个输入特征图对应的卷积结果for i in range(self.in_channels):single = self.single_forward(inputs[:, i, :, :], w[i])multi_outs.append(single)# print("Conv2D in_channels:",self.in_channels,"i:",i,"single:",single.shape)# 将所有卷积结果相加feature_map = torch.sum(torch.stack(multi_outs),0) + b # Zpfeature_maps.append(feature_map)# print("Conv2D out_channels:",self.out_channels, "p:",p,"feature_map:",feature_map.shape)p += 1# 将所有Zp进行堆叠out = torch.stack(feature_maps, 1)return outinputs = torch.tensor([[[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]],[[1.0, 2.0, 3.0], [4.0, 5.0, 6.0], [7.0, 8.0, 9.0]]]])
conv2d = Conv2D(in_channels=2, out_channels=3, kernel_size=2)
print("inputs shape:", inputs.shape)
outputs = conv2d(inputs)
print("Conv2D outputs shape:", outputs.shape)# 比较与paddle API运算结果
conv2d_paddle = nn.Conv2d(in_channels=2, out_channels=3,kernel_size=2,)
outputs_paddle = conv2d_paddle(inputs)
# 自定义算子运算结果
print('Conv2D outputs:', outputs)
# paddle API运算结果
print('nn.Conv2D outputs:', outputs_paddle)
inputs shape: torch.Size([1, 2, 3, 3])
Conv2D outputs shape: torch.Size([1, 3, 2, 2])
Conv2D outputs: tensor([[[[20., 28.],[44., 52.]],[[20., 28.],[44., 52.]],[[20., 28.],[44., 52.]]]], grad_fn=<StackBackward>)nn.Conv2D outputs: tensor([[[[-2.0249, -2.6304],[-3.8416, -4.4472]],[[-0.2048, -0.6759],[-1.6180, -2.0890]],[[ 0.8913, 1.2849],[ 2.0720, 2.4656]]]], grad_fn=<ThnnConv2DBackward>)Process finished with exit code 0pytorch框架中的卷积核参数与自定义中的卷积核参数不同,导致输出结果与自定义算子不同
卷积核参数如下:
Parameter containing:
tensor([[[[ 0.0776, -0.2293],[-0.0970, 0.3162]],[[ 0.0123, 0.0400],[-0.2898, 0.1585]]],[[[ 0.3282, 0.0408],[-0.0139, -0.2561]],[[ 0.0024, -0.0025],[-0.2003, -0.1251]]],[[[ 0.2519, -0.2914],[ 0.1964, 0.2667]],[[-0.0483, 0.0835],[-0.0808, 0.3366]]]], requires_grad=True)Process finished with exit code 0
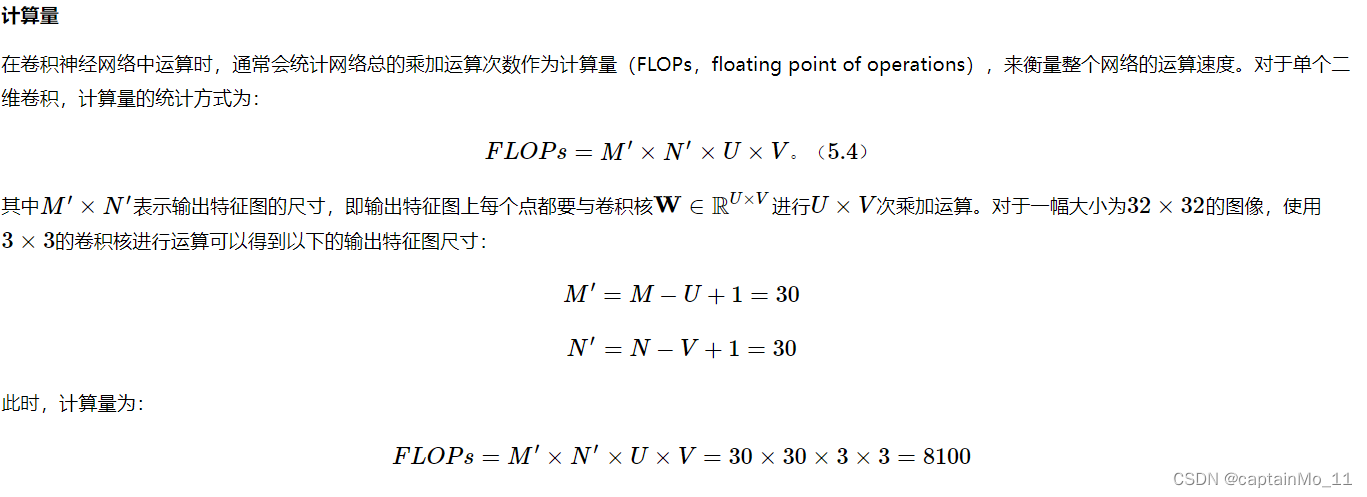
5.2.1.3 卷积算子的参数量和计算量
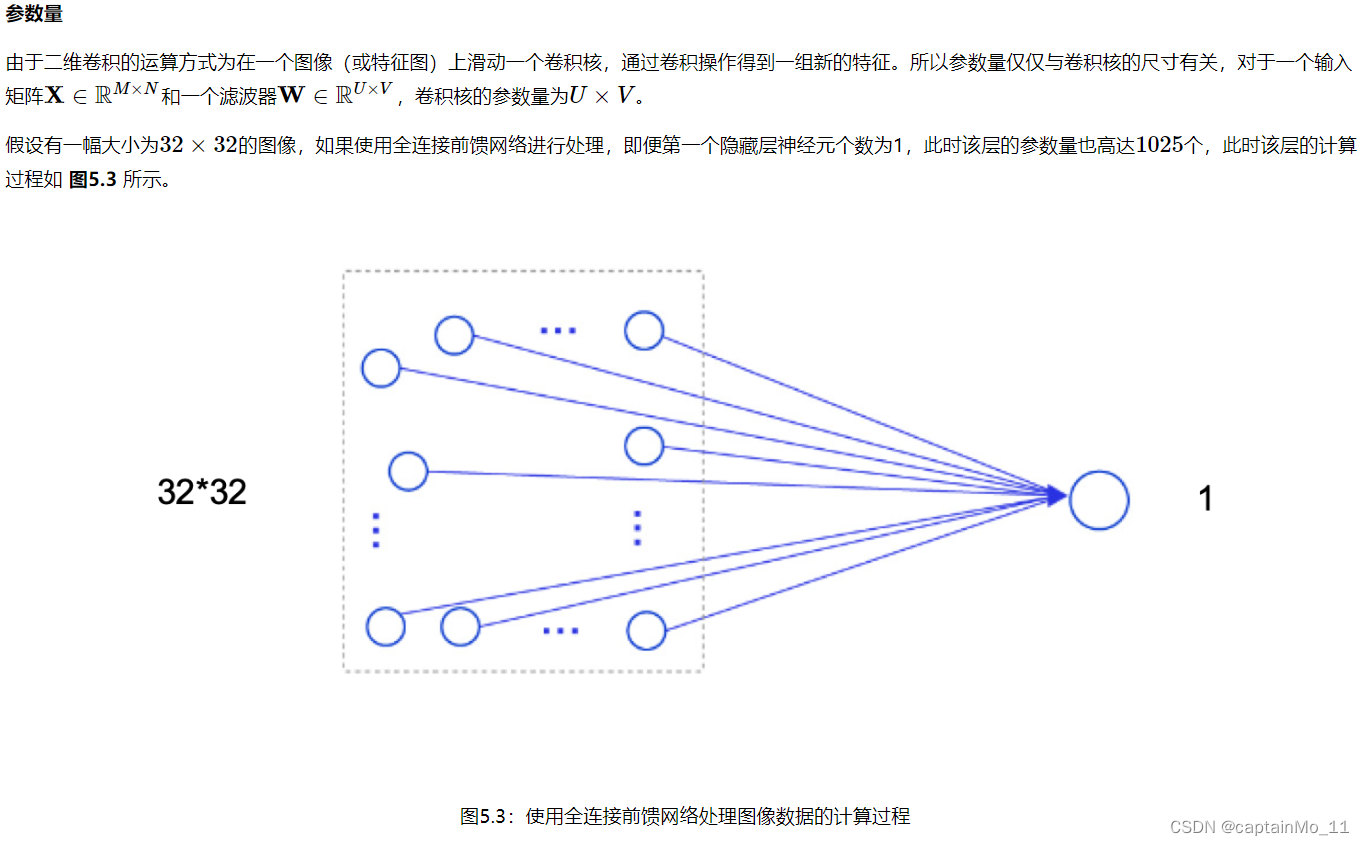
可以想像,随着隐藏层神经元数量的变多以及层数的加深,使用全连接前馈网络处理图像数据时,参数量会急剧增加。
如果使用卷积进行图像处理,当卷积核为3×33×3时,参数量仅为99,相较于全连接前馈网络,参数量少了非常多。
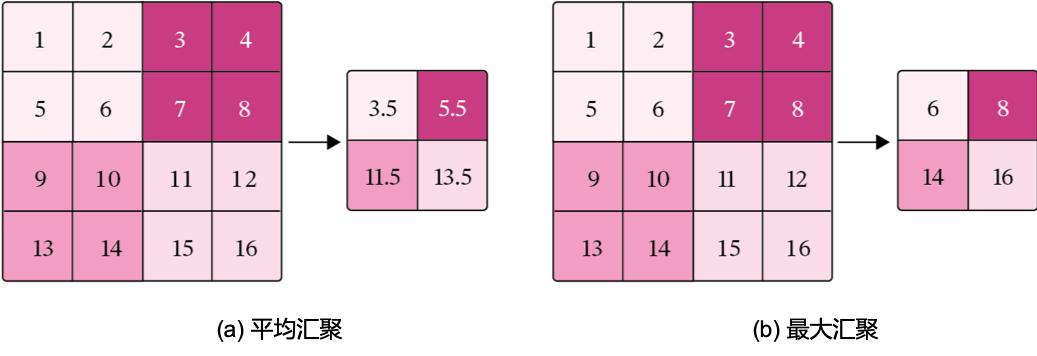
5.2.2 汇聚层算子
汇聚层的作用是进行特征选择,降低特征数量,从而减少参数数量。
由于汇聚之后特征图会变得更小,如果后面连接的是全连接层,可以有效地减小神经元的个数,节省存储空间并提高计算效率。
常用的汇聚方法有两种,分别是:平均汇聚、最大汇聚。
1. 代码实现一个简单的汇聚层。
2. torch.nn.MaxPool2d();torch.nn.avg_pool2d()代码实现
3. 比较自定义算子和框架中的算子
class Pool2D(nn.Module):def __init__(self, size=(2, 2), mode='max', stride=1):super(Pool2D, self).__init__()# 汇聚方式self.mode = modeself.h, self.w = sizeself.stride = stridedef forward(self, x):output_w = (x.shape[2] - self.w) // self.stride + 1output_h = (x.shape[3] - self.h) // self.stride + 1output = torch.zeros([x.shape[0], x.shape[1], output_w, output_h])# 汇聚for i in range(output.shape[2]):for j in range(output.shape[3]):# 最大汇聚if self.mode == 'max':output[:, :, i, j] =\x[:, :, self.stride * i:self.stride * i + self.w, self.stride * j:self.stride * j + self.h]\.max(dim=2).values.max(dim=2).values# 平均汇聚elif self.mode == 'avg':output[:, :, i, j] = \x[:, :, self.stride * i:self.stride * i + self.w, self.stride * j:self.stride * j + self.h]\.mean(dim=[2, 3])return outputinputs = torch.tensor([[[[1., 2., 3., 4.], [5., 6., 7., 8.], [9., 10., 11., 12.], [13., 14., 15., 16.]]]])
pool2d = Pool2D(stride=2)
outputs = pool2d(inputs)
print("input: {}, \noutput: {}".format(inputs.shape, outputs.shape))# 比较Maxpool2D与paddle API运算结果
maxpool2d_paddle = nn.MaxPool2d(kernel_size=(2, 2), stride=2)
outputs_paddle = maxpool2d_paddle(inputs)
# 自定义算子运算结果
print('Maxpool2D outputs:', outputs)
# paddle API运算结果
print('nn.Maxpool2D outputs:', outputs_paddle)# 比较Avgpool2D与paddle API运算结果
avgpool2d_paddle = nn.AvgPool2d(kernel_size=(2, 2), stride=2)
outputs_paddle = avgpool2d_paddle(inputs)
pool2d = Pool2D(mode='avg', stride=2)
outputs = pool2d(inputs)
# 自定义算子运算结果
print('Avgpool2D outputs:', outputs)
# paddle API运算结果
print('nn.Avgpool2D outputs:', outputs_paddle)input: torch.Size([1, 1, 4, 4]),
output: torch.Size([1, 1, 2, 2])
Maxpool2D outputs: tensor([[[[ 6., 8.],[14., 16.]]]])
nn.Maxpool2D outputs: tensor([[[[ 6., 8.],[14., 16.]]]])
Avgpool2D outputs: tensor([[[[ 3.5000, 5.5000],[11.5000, 13.5000]]]])
nn.Avgpool2D outputs: tensor([[[[ 3.5000, 5.5000],[11.5000, 13.5000]]]])自定义算子和框架算子参数相同。
汇聚层的参数量和计算量
由于汇聚层中没有参数,所以参数量为0;
最大汇聚中,没有乘加运算,所以计算量为0,
平均汇聚中,输出特征图上每个点都对应了一次求平均运算。
总结:这次试验体会了自定义算子的流程,了解了池化和卷积操作,了解了框架算子的使用方法,以及与自定义算子的区别。
这篇关于NNDL 实验六 卷积神经网络(2)基础算子的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





