本文主要是介绍自动驾驶行业了解Part2-L4级自动驾驶技术以及成本分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
自动驾驶整体技术实现层级
自动驾驶系统可分为感知层、决策层、执行层
L4级自动驾驶系统实现在特定区域内对车辆操作的完全接管,系统需要实现:对周围障碍物的感知、车辆定位以及路径规划(2W1H),实现这些功能需要构建感知层、决策层、执行层这三个层面的技术架构,这三个技术层级分别代表着L4自动驾驶系统的眼和耳、大脑以及手脚。基于当前技术发展情况,我们在本部分主要讨论车辆内部所采用的一些传感器和计算单元。除了本地的传感器和处理器外,系统通过与外部车辆、设施进行信息交互,以及在高精度地图等辅助下可以获得更好的环境感知能力。o

自动驾驶环境感知传感器(一)
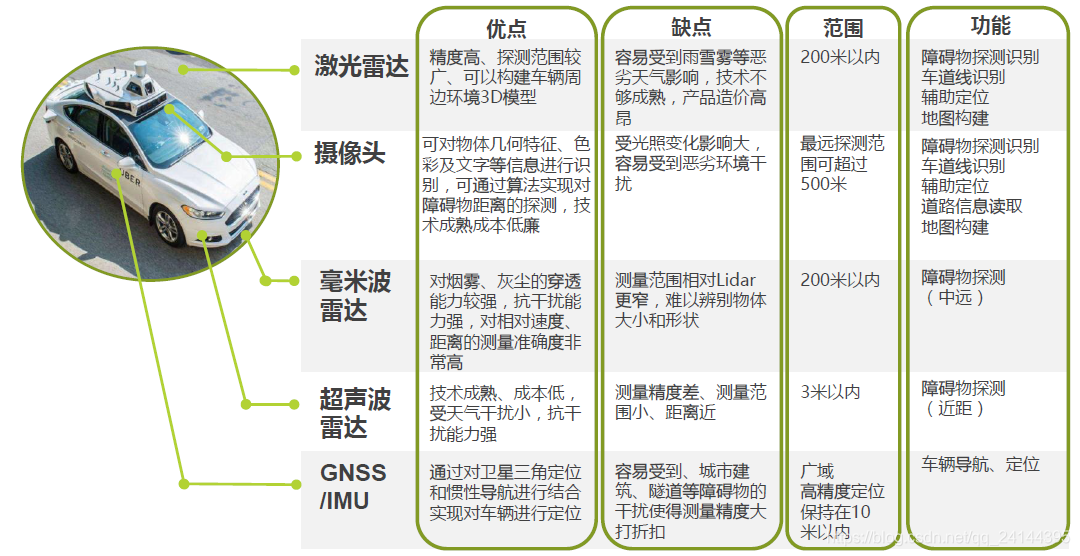
感知层需要对多种传感器进行融合以实现冗余
感知层主要是为自动驾驶系统获取外部行驶道路环境数据并帮助系统进行车辆定位,当前无人驾驶系统中代表性的传感器有激光雷达、摄像头、毫米波雷达、超声波雷达、GNSS/IMU等,由于其工作原理、技术特性各不相同决定其适用的应用场景各异,所以当前大部分车辆都是采用多种传感器相融合的方式以应对各种可能发生的情况,保证系统冗余。
自动驾驶环境感知传感器(二)
车用摄像头产品对比车用激光雷达产品更加成熟
激光雷达发展始于上世纪70年代,主要应用于军事、航空航天、测绘等领域,主要可以实现测距、定位、环境监测、以及动态、静态3D环境模型的构建。车用激光雷达起步较晚,目前产品不够成熟面临多重问题需要克服,如:能够搭载在车上的产品有效测距较短;产品固态化、小型化技术不够成熟,难以满足车辆要求;配套产业链尚未成熟,难以实现量产;由于产量少,产品售价高昂(Velodyne HDL-64售价高达于7.5万美元)。相比之下,由于在消费电子领域多年发展积累,摄像头在技术(成像效果、产品小型化)、产业链方面(成本控制)均比较成熟,而且在探测距离、价格方面亦有明显优势。最新开发的产品即使是在外部光线条件不佳的情况下也能够给出较好的成像输出。

自动驾驶环境感知传感器(三)
激光雷达未来将朝向小型化、电子化、固态化发展
虽然车用摄像头产品已经很成熟,但激光雷达在L3级以上的自动驾驶系统中是不可或缺的,因为激光雷达可以生成车辆周边环境的3D模型,为系统提供深度的环境数据,而且其在车辆定位中也扮演着重要的角色。
激光雷达能够发射的激光线束越多,其所能提供的探测精度和探测距离越好,但价格也越昂贵,如高速公路场景一般需要激光雷达能能够发射100线束以上;但针对一些中低速场景,也可采取多台低线束激光雷达以规避高昂的成本。
目前机械式激光雷达体积庞大、结构复杂,成本高昂,难以满足车辆使用要求,多家厂商正在着手研制半固态、固态激光雷达,以实现产品小型化、轻量化方向发展,随着未来相关技术进一步成熟,产品实现量产后,成本有望降至千元级别。

自动驾驶计算决策层
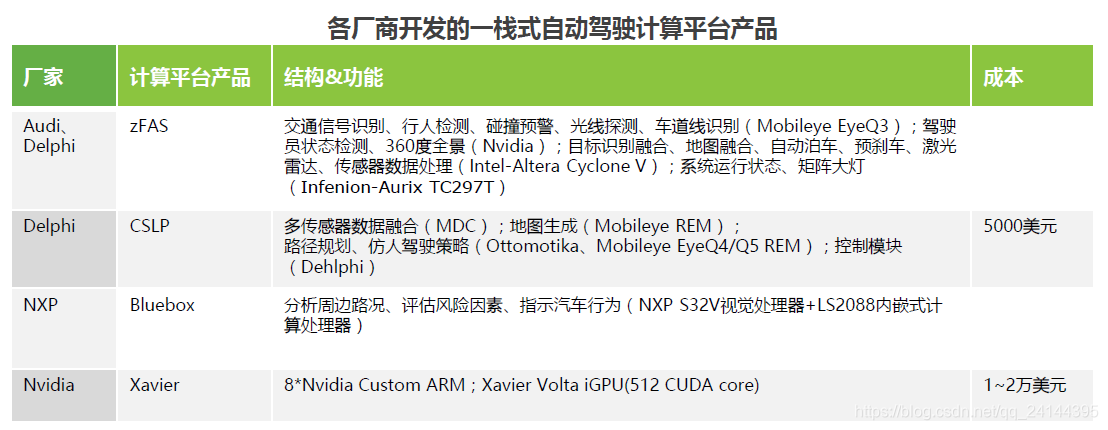
IC公司和Tier1大力投资研发布局该领域
目前自动驾驶厂商传感器搭配基本趋同,而决定L4级自动驾驶落地的时间快慢更多的是取决于系统的决策环节,包括相关算法和计算平台。我们知道传感器每秒钟都会产生大量数据,计算平台需要有能力在极短时间内对大量的数据进行处理、分析并给车辆执行层下达操作指令以保证自动驾驶车辆的安全行驶。自动驾驶专用计算平台需要能够融合多种专用芯片和处理器,技术门槛极高,当前各大科技公司、Tier1都在布局该领域的技术研发,尤其是专业芯片环节具有极高的技术门槛,如Intel收购Altera(FPGA)、Movidius(视觉处理芯片)和Mobileye。目前由于产量少、造价高昂,当前一台计算平台的售价都在几万元甚至是十几万元,随着未来量产,成本有望降至万元以下。
L4级自动驾驶系统组建
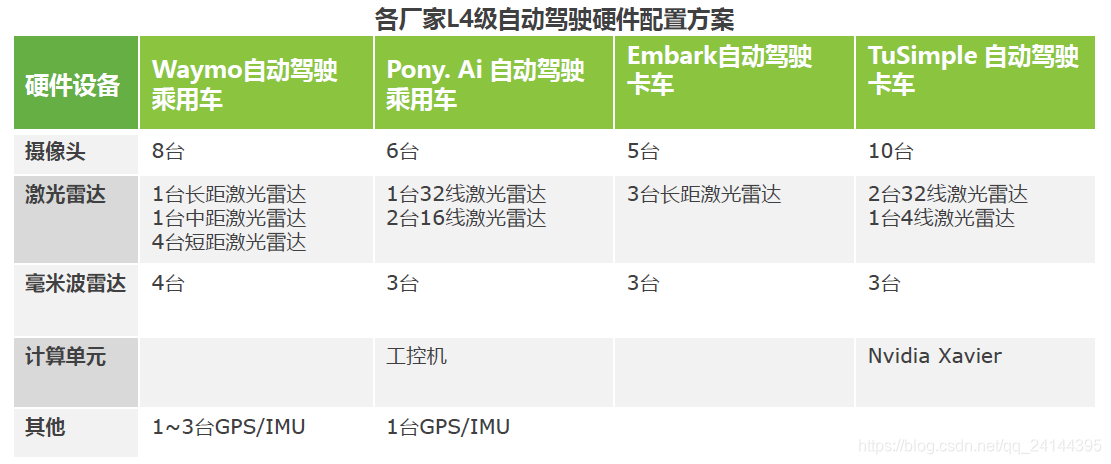
目前行业并无统一的最优系统组建方案
根据我们与行业内部分无人驾驶整体解决方案提供商的交流,目前各家厂商并无最优、唯一的L4级系统组建方案,每家在搭建自己的自动驾驶系统时都会根据不同的应用场景去选择不同的传感器配置方案,且由于当前上游厂商产品也处在快速迭代过程中,因此厂商也在尝试搭配选择不同的上游厂商所提供的产品。整体系统的造价和性能都在短时间内(季)快速迭代。
当前L4级自动驾驶系统硬件成本高昂
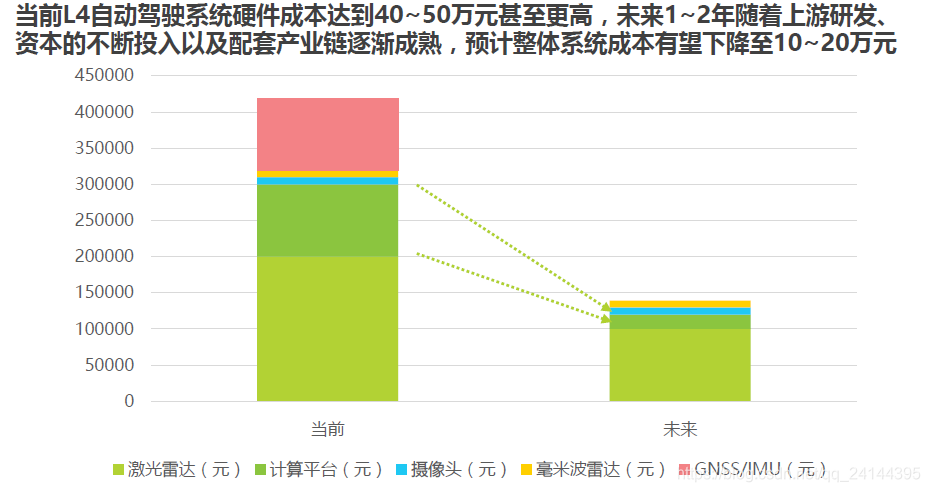
随着产业链成熟和产量提升硬件成本有望实现大幅下降
目前大体上实现L4自动驾驶的硬件设备一般包含:6~12台摄像头、3~12台毫米波雷达、5台以内的激光雷达以及1~2台GNSS/IMU和1~2台计算平台(不同方案会选择不同侧重的传感器)。当前一整套L4级自动驾驶系统硬件成本还比较昂贵,整体基本在50万元左右甚至更高,而未来随着资本、研发的不断投入,自动驾驶产品逐渐落地、配套产业链逐渐成熟,预计整套系统硬件成本会在1~2年左右降至10~20万元,并最终有望控制在10万元以内。
这篇关于自动驾驶行业了解Part2-L4级自动驾驶技术以及成本分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







