本文主要是介绍机器视觉运动控制一体机应用例程 | 齿轮缺齿检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
齿轮缺齿是其生产制造过程中的一个重大缺陷,需通过检测技术进行规避。如果使用人工进行检测,不仅会增加人工成本,且检测时容易漏检或者由于注意力不集中而导致误判,因此我们引入了机器视觉检测技术进行齿轮缺齿检测。
机器视觉齿轮检测为非接触式的无损检测方法,与传统人工检测相比,具有不可取代的优越性。
机器视觉齿轮检测系统在追求高速度、高效率、高重复性和精确度的工业生产制造过程中也更为可靠,把机器视觉检测方法用于制造系统是工业发展的方向和必然趋势,也是提高生产效率的有效途径。
上期课程,我们讲述了机器视觉方案中液位检测的应用例程,本期课程我们和大家一起分享机器视觉齿轮缺轮检测的应用例程。
视觉运动控制一体机应用例程(七)齿轮缺齿检测
一 、检测原理
(一)检测要求
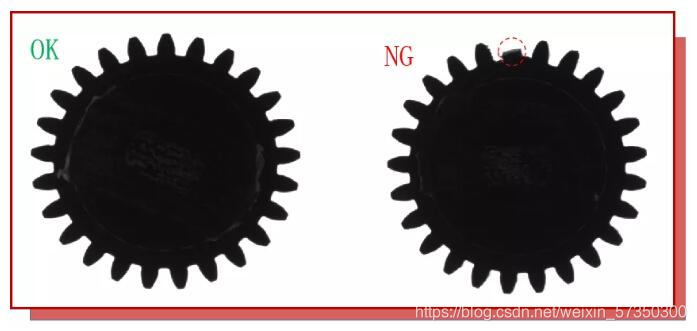
检测齿轮状产品外边缘上的轮齿是否完整,如有缺失返回“NG”状态,并显示位置信息。若齿轮完整,则返回“OK”状态。
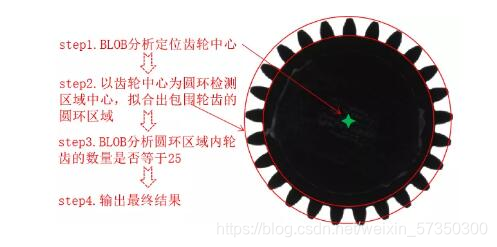
(二)软件算法
二 、软件实现
(一)软件实现
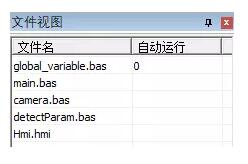
1.打开ZDevelop软件:新建项目→新建“HMI”文件→新建“main.bas”文件,用于编写界面响应函数→新建“global_variable.bas”文件用于存放全局变量并开启HMI自动运行任务→新建“detectParam.bas”文件用于初始化测量参数→新建“camera.bas”文件用于实现相机采集功能→文件添加到项目。
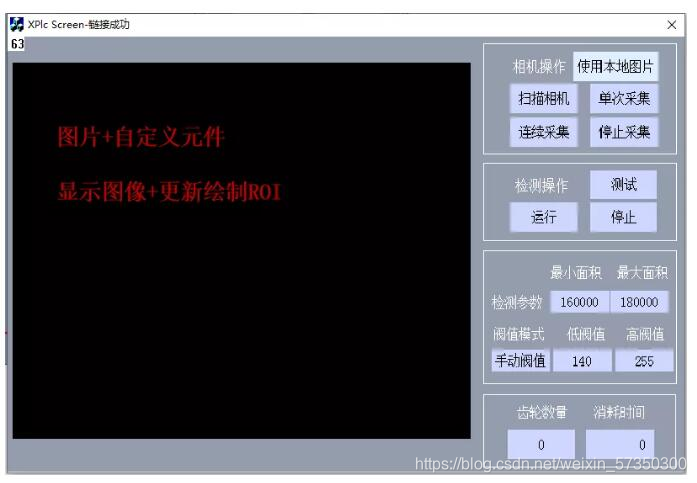
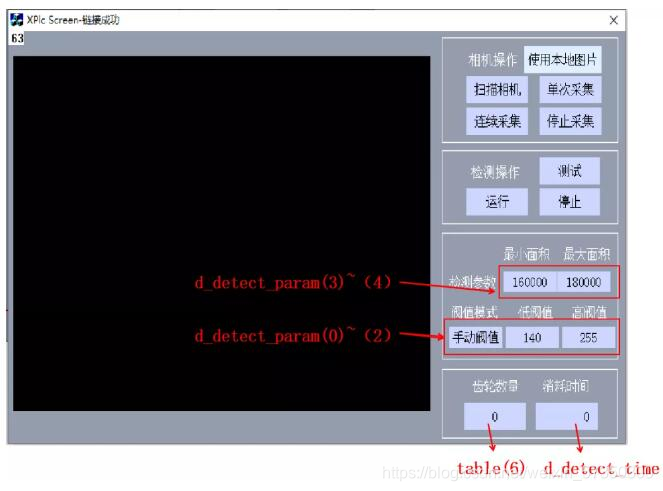
2.设计HMI界面。
3.在“global_variable.bas”文件中定义全局变量,定义完成后运行“Hmi.hmi”文件。
'''''全局变量大部分使用数组结构'''''''注:basic编程中很多函数会以TABLE(系统的数据结构)做为参数''table 说明 table 说明''0 ' 自动二值化阈值 11~12 鼠标操作时获取的坐标''2 亮区域的面积 20~24 图像信息''4 暗区域的面积 6 齿轮的数量 ''40~42 齿轮的面积和位置X,Y数据 '主任务状态'0 - 未初始化'1 - 停止'2 - 运行中'3 - 正在停止GLOBAL DIM main_task_statemain_task_state = 1'采集开关'0 - 停止采集'1 - 请求采集GLOBAL DIM grab_switchgrab_switch = 0'相机个数GLOBAL cam_numcam_num = 0'相机种类,"zmotion;mvision;basler;mindvision;huaray"GLOBAL DIM CAMERA_TYPE(16)CAMERA_TYPE = "mvision"' 定义主任务id - 10GLOBAL DIM main_task_idmain_task_id = 10'定义连续采集任务id - 9GLOBAL DIM grab_task_idgrab_task_id = 9'定义全局图像变量GLOBAL ZVOBJECT grabImg '采集图像GLOBAL ZVOBJECT disImg '显示图像'定义常用颜色变量GLOBAL C_RED, C_GREEN, C_BLUE, C_YELLOWC_RED = RGB(255, 0, 0)C_GREEN = RGB( 0,255, 0)C_BLUE = RGB( 0, 0,255)C_YELLOW= RGB(255,255, 0)'检测参数:阈值模式(自动阈值或手动阈值)、低阈值、高阈值、最小面积、最大面积GLOBAL DIM d_detect_param(5) 'd开头表示数据结构'检测消耗时间GLOBal DIM d_detect_time'显示打印的字符GLOBAL ShowString(64)GLOBAL ShowString1(64)'***********定义读取本地文件功能相关变量**************''注意,该功能只在使用仿真器时有效'定义是否使用本地图片标志GLOBAL DIM d_use_imgfile'定义本地图片索引GLOBAL DIM d_index'定义读取图片的路径GLOBAL DIM File_Name(100) '***********结束定义读取本地文件功能相关变量**********'运行HMI文件RUN "Hmi.hmi",1
4.在“detectParam.bas”文件中初始化测量参数。
endGLOBAL SUB init_detect_param() '初始化测量参数'初始化检测参数:阈值模式(自动阈值 = 1 或 手动阈值 = 0)、低阈值、高阈值、极性(黑或白)、最大、最小、反向(即结果取反,成功变成失败、失败变成成功)d_detect_param(0) = 0 '手动阈值d_detect_param(1) = 140 '低阈值d_detect_param(2) = 255 '高阈值d_detect_param(3) = 160000 '最小面积即像素个数d_detect_param(4) = 180000 '最大面积d_use_imgfile = 1 '默认使用本地图片d_index = 0TABLE(6)=0 '将齿轮数量初始化为0END SUB
5.关联HMI界面控件变量。
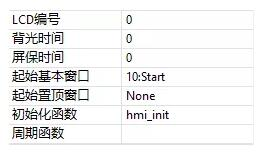
6.在“main.bas”文件中添加HMI界面初始化函数并在Hmi系统设置中关联初始化函数。
'HMI界面初始化函数GLOBAL SUB hmi_init()grab_switch = 0 '停止采集main_task_state = 1 '主任务停止运行ZV_RESETCLIPSIZE(1280, 960) '依据图像分辨率设置区域的裁剪尺寸,此处图像分辨率为1280x960ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(10, 7), HMI_CONTROLSIZEY(10, 7)) '设置锁存的大小init_detect_param() '初始化测量参数ZV_SETSYSDBL("CamGetTimeout", 1000) '设置采集超时ZV_SETSYSINT("LineWidth",6)ZV_LATCHCLEAR(0) '清空锁存通道0END SUB
7.在“camera.bas”文件中添加HMI界面中采集相关按钮响应的函数并关联动作函数。(说明:具体实现函数前两篇课程内容已经有操作演示,此处不做赘述。)
8.在“main.bas”文件中添加HMI界面按下【测试】按钮时响应的函数并关联动作函数名。
'HMI界面按下测试按钮时响应的函数GLOBAL SUB btn_test()TABLE(6)=0 '检测前先将结果数据清0d_detect_time=0TICKS=0'定义变量,依次为白色像素连通区域,掩模区域,黑色像素连通区域,齿轮连通区域结果列表,单个齿轮连通区域,圆环区域,齿轮齿牙连通区域ZVOBJECT regionWhite, regionMask, regionBlack,re_connecte,circle_connect,region,re_connecte1'生成全图像区域ZV_REGENFULLIMG(grabImg,regionMask)'二值化处理if d_detect_param(0) = 0 then '如果选择手动阈值模式'根据低阈值和高阈值参数生成白色像素图像regionWhiteZV_RETHRESH(grabImg, regionMask, regionWhite, d_detect_param(1), d_detect_param(2))'对白色像素区域进行一次1*1的开运算ZV_REOPENING(regionWhite,regionWhite,3,3)'对白色像素区域进行一次1*1的闭运算ZV_RECLOSING(regionWhite,regionWhite,3,3)else '如果选择自动阈值模式Dim autoThresh '定义自动阈值模式下的二值化阈值'在grabImg图像中的指定区域内对图像进行自动二值化处理,输出二值化区域regionWhite ZV_REAUTOTHRESH(grabImg, regionMask, regionWhite, 0)'对白色像素区域进行一次1*1的开运算ZV_REOPENING(regionWhite,regionWhite,1,1)'对白色像素区域进行一次1*1的闭运算ZV_RECLOSING(regionWhite,regionWhite,1,1)autoThresh = TABLE(0)? "autoThresh = " autoThresh '打印提示信息,当前二值化阈值endifZV_REDIFF (regionMask, regionWhite, regionBlack) '差集运算,结果为regionBlack(黑色像素区域)ZV_REAREA(regionBlack, 500) '计算黑色像素区域的面积(即像素数量)存放到table(500)中if(TABLE(500)>0) then '如果获取到的黑色像素数量大于0 ZV_RECONNECT(regionBlack,re_connecte) '计算区域的连通区域,存放到re_connecte列表中zv_refilter(re_connecte,0,d_detect_param(3),d_detect_param(4),0)'对区域列表中的区域进行过滤,保留面积在 d_detect_param(3) 到 d_detect_param(4) 的区域,面积不在此范围的区域将被过滤掉zv_refilter(re_connecte,20,0.9,1.2,0)'对区域列表中的区域进行过滤,保留最小外接矩形高宽比在0.9 到 1.2 的区域,面积不在此范围的区域将被过滤掉ZV_LISTCOUNT(re_connecte,6) '获取列表中的连通区域的数量,存放到table(6)中 endif'绘制效果图Dim width, heightZV_IMGINFO (grabImg, 20)'获取grabImg的图像信息width = TABLE(20)height = TABLE(21)ZV_GRAYTORGB(grabImg,disImg)'将灰度图转换到RGB图像,用于绘制检测结果图像ZV_REGION(disImg, regionMask, 0, ZV_COLOR(0,0,0)) '绘制黑色的regionMask区域ZV_REGION(disImg, regionWhite, 0, ZV_COLOR(255,255,255))'绘制白色的regionWhite区域for i=0 to TABLE(6)-1 '循环获取齿轮的位置XY信息生成圆环区域,检测是否缺齿ZV_LISTGET(re_connecte,circle_connect,i) '获取列表中序号为i的元素,即依次获取列表中齿轮连通区域ZV_REAREACENTER(circle_connect,40) '计算每个齿轮的面积与中心位置,将数据放入TABLE(40)中ZV_REGENANNULAR(region,TABLE(41),TABLE(42),220,260)'生成圆环区域'根据低阈值和高阈值参数生成白色像素图像regionWhiteZV_RETHRESH(grabImg, region, regionWhite, d_detect_param(1), d_detect_param(2))ZV_REDIFF (region, regionWhite, regionBlack)'进行差集运算,结果为regionBlack(黑色像素区域)ZV_RECONNECT(regionBlack,re_connecte1) '计算圆环区域内的黑色连通区域,存放到re_connecte列表中zv_refilter(re_connecte1,0,1000,3000,0) '对区域列表中的连通区域进行面积过滤ZV_LISTCOUNT(re_connecte1,8) '获取单个齿轮齿牙的数量,存放到table(8)中 if TABLE(8)=25 then ZV_TEXT(disImg,"OK",TABLE(41),TABLE(42),70,ZV_COLOR(0,255,0)) '显示结果文本else ShowString=TOSTR(TABLE(41),1,2)ShowString1=TOSTR(TABLE(42),1,2)ZV_TEXT(disImg,"NG,"ShowString","ShowString1,TABLE(41),TABLE(42),55,ZV_COLOR(255,0,0)) '显示结果文本endifZV_MARKER(disImg,TABLE(41),TABLE(42),0,50,zv_color(0,255,0)) '在图像img中绘制十字nextZV_LATCH(disImg, 0) '在锁存通道0中显示结果图像d_detect_time=ABS(TICKS)'计算检测消耗时间END SUB
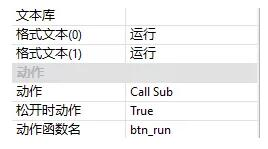
9.在“main.bas”文件中添加【运行】按钮响应的函数并关联动作函数。
'HMI界面按下运行按钮时响应的函数GLOBAL SUB btn_run()if(2 = main_task_state) then '如果主任务处于运行状态,打印提示信息并退出函数?"已经开启连续运行任务,请勿重复操作!"return endifif (1 = main_task_state) then '如果主任务处于停止状态if (0 = PROC_STATUS(main_task_id)) then '如果任务未开启main_task_state = 2 '主任务状态设置为2,表示正在执行连续任务RUNTASK main_task_id, main_task '开启主任务endifendifEND SUB
10.在“main.bas”文件中添加【停止】按钮响应的函数并关联动作函数。
'HMI界面按下停止按钮时响应的函数GLOBAL SUB btn_stop()if (2 = main_task_state) then '如果主任务状态处于3即正在连续执行任务时main_task_state = 3 '将主任务状态置为3,退出循环endifEND SUB

三、 操作演示
(一)操作步骤
查看运行效果:将控制器接入电源,使用网线将控制器与PC连接,将相机通电并接入控制器→将相机、光源安装在打光测试架上,镜头连接到相机上→连接控制器,并将项目下载到控制器→运行程序,调整打光图像效果,测试程序运行效果。
(二)效果演示
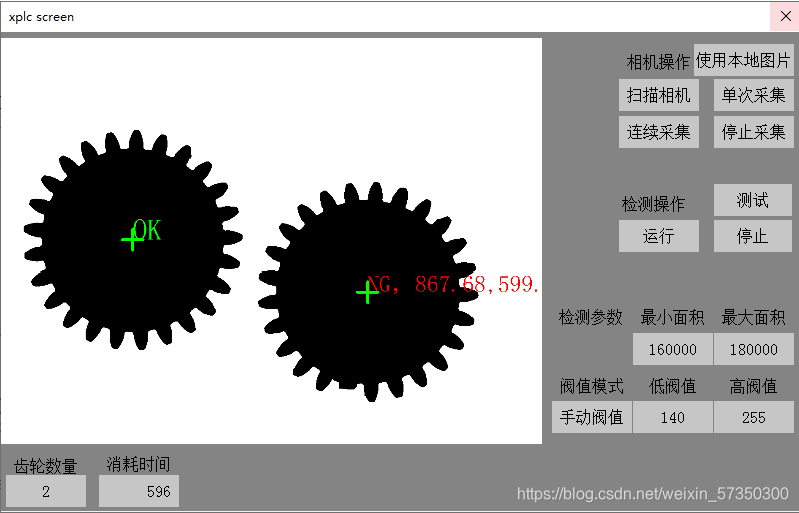
本次,正运动技术机器视觉运动控制一体机应用例程(七)齿轮缺齿检测,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
这篇关于机器视觉运动控制一体机应用例程 | 齿轮缺齿检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







