本文主要是介绍BDS/GNSS 卫星定位 SOC 芯片AT6558R 适用车载定位与导航,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
芯片简介
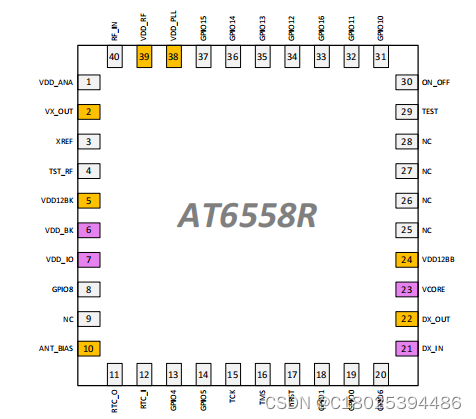
AT6558R 是一款高性能 BDS/GNSS 多模卫星导航接收机 SOC 单芯片,片上集成射频前端,数字基带处理器,32 位的 RISC CPU,电
源管理功能。
芯片支持多种卫星导航系统,包括中国的北斗卫星导航系统 BDS,美国的 GPS,俄罗斯的 GLONASS,日本 QZSS 系统,并实现多系统联合定位。
性能指标

主要特征
- 支持 BDS/GPS/GLONASS/QZSS 多系统联合定位和单系统独立定位。
- 支持北斗二号/三号 1-63 号全部卫星。
- 具备有源天线检测与保护。
- 电源管理
内部集成 DCDC 和 LDO;
支持 3.3V 单电源供电(使用内部 DCDC)或 1.8V~3.3V 单电源直接供电(不使用内部 DCDC)。 - RTC 和备份电路电源可低至 1.4V。
- 功耗:
BDS/GPS 双模连续运行:~23mA@3.3V。
待机:8uA(@3.3V)。 - 封装尺寸:
QFN40,5mm×5mm×0.9mm。
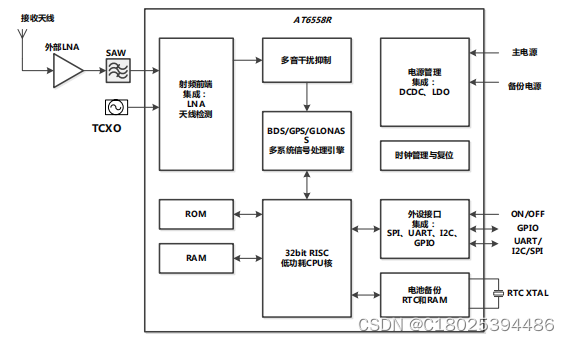
芯片框图
芯片应用 - 车载定位与导航
- 授时
- 可穿戴设备
- 便携式设备,如手机、平板电脑
这篇关于BDS/GNSS 卫星定位 SOC 芯片AT6558R 适用车载定位与导航的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






