本文主要是介绍[mj_robot_sim]多关节机器人仿真软件介绍,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
全称:Multi-Joints Robot Simulator
代码地址:https://github.com/Jelatine/mj_robot_sim
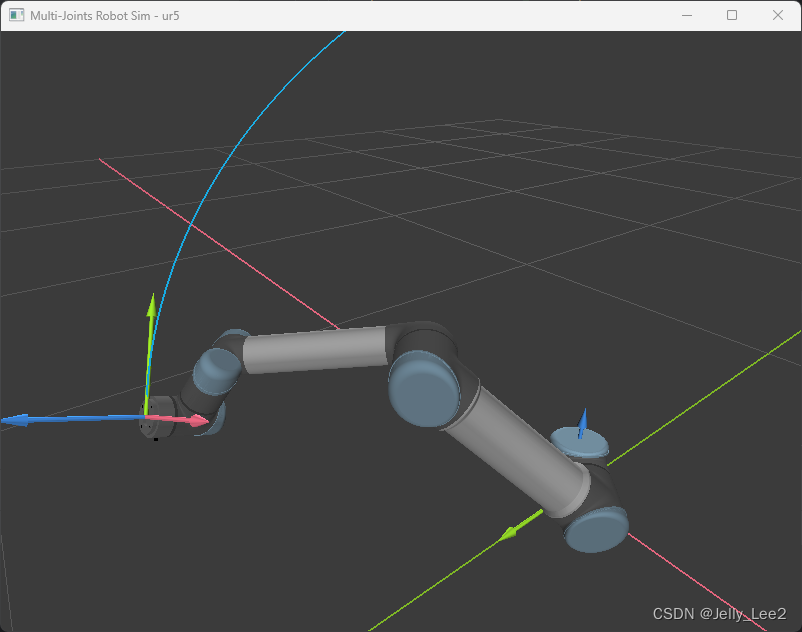
v0.1.6更新:显示空间基坐标系、工具坐标系、末端轨迹
v0.1.5更新:完成直线模型显示,完成地面网格显示,标题显示机械臂名称
v0.1.4更新:修复闪烁问题,优化*.dae文件导入速度,增加回调接口
v0.1.3更新:完成*.dae和*.stl文件导入,去除assimp库
v0.1.2更新:减少第三方库依赖,去除glm和urdfdom库
以下内容对应版本:v0.1.1
设计目的
- 个人学习
opengl的技术落地尝试 - 设计一个跨平台、轻量级的机器人仿真软件,方便调试机器人
特性
- 轻量级,接口简单易用
- 跨平台,可运行在
Windows、Linux环境 - 通过
glfw3、glad和glm搭建opengl三维显示窗口 - 使用URDF加载机器人数据,其中通过
urdfdom库解析URDF文件,assimp库导入模型文件 - 支持多窗口同时显示
依赖库
- glad
- glfw3
- glm
- assimp
- urdfdom
建议使用vcpkg安装
vcpkg install glad
vcpkg install glfw3
vcpkg install glm
vcpkg install assimp
vcpkg install urdfdom
编译
使用CMAKE_TOOLCHAIN_FILE指定本机vcpkg.cmake路径,以下/path为示例
mkdir build
cd build
cmake .. -DCMAKE_TOOLCHAIN_FILE=/path/vcpkg/scripts/buildsystems/vcpkg.cmake
cmake --build .
接口
构造函数
/*** 多关节机器人仿真软件接口* @param _urdf URDF文件路径*/
explicit MJRobotSim(const std::string &_urdf);
启动窗口界面
/*** 启动仿真界面* @return -1 模型加载失败, >=0 可动关节数量(REVOLUTE,CONTINUOUS,PRISMATIC)*/
int start();
获取关节数量
/*** 获取可动关节数量(REVOLUTE,CONTINUOUS,PRISMATIC)* @return 关节数量*/
unsigned int size() const;
通过关节索引获取/设置关节值
/*** 获取/设置关节值,单位: 旋转关节-度(°);平移关节-米(m)* @param index 关节索引* @return 关节值的引用*/
double &operator[](const unsigned int &index);
通过关节名称获取/设置关节值,假设urdf关节定义为<joint name="joint_a1" type="revolute">,通过sim["joint_a1"]=30;设置
/*** 获取/设置关节值,单位: 旋转关节-度(°);平移关节-米(m)* @param name 关节名称* @return*/
double &operator[](const std::string &name);
退出状态查询
/*** 退出状态* @return 1 运行中, 0 正常退出, -1 模型加载失败, -2 窗口加载失败*/
int exit_status() const;
例程
最简例程
#include "mj_robot_sim.h"
#include <thread>int main() {MJRobotSim sim("urdf/ur5.urdf");sim.start();while (sim.exit_status() > 0) {for (unsigned int i = 0; i < sim.size(); ++i) { sim[i] += 0.1; } // 关节运动测试std::this_thread::sleep_for(std::chrono::milliseconds(10));}
}
多窗口
#include "mj_robot_sim.h"
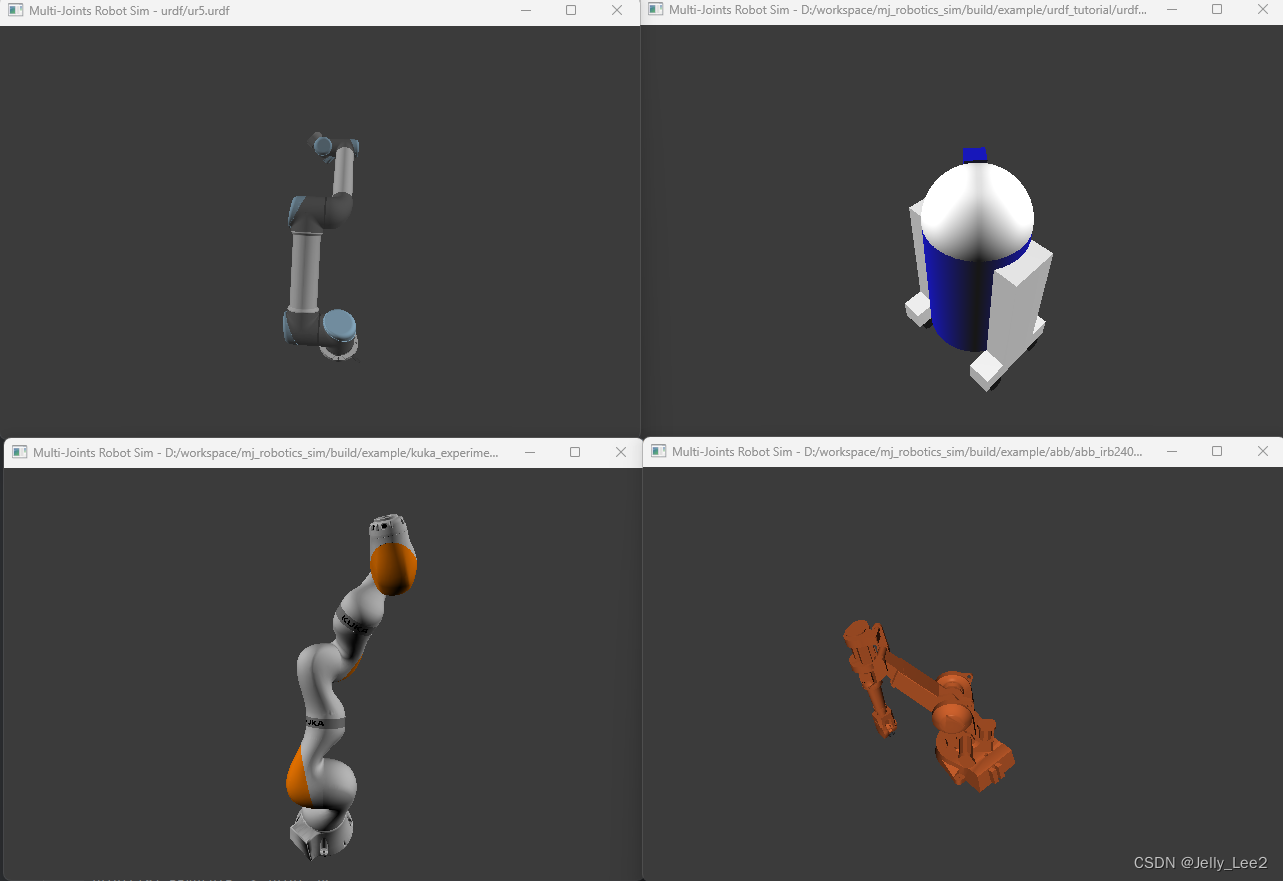
#include <thread>int main() {MJRobotSim sim("urdf/ur5.urdf");sim.start();MJRobotSim urdf_tutoral("urdf_tutorial/urdf/07-physics.urdf");urdf_tutoral.start();MJRobotSim abb("abb/abb_irb2400_support/urdf/irb2400.urdf");abb.start();int running_count{0};do {std::this_thread::sleep_for(std::chrono::milliseconds(10));running_count = 0; // 从零开始计算运行窗口个数for (unsigned int i = 0; i < sim.size(); ++i) { sim[i] += 0.1; }running_count += (sim.exit_status() > 0) ? (1) : (0);for (unsigned int i = 0; i < urdf_tutoral.size(); ++i) { urdf_tutoral[i] += 0.1; }running_count += (urdf_tutoral.exit_status() > 0) ? (1) : (0);for (unsigned int i = 0; i < abb.size(); ++i) { abb[i] += 0.1; }running_count += (abb.exit_status() > 0) ? (1) : (0);} while (running_count > 0);
}
仓库Demo的编译选项
可通过编译选项USE_URDF_TUTORIAL,USE_ABB_IRB2400,USE_KUKA_LBR_IIWA测试example/mjr_sim_demo.cpp的多窗口显示,如下图所示:
cmake .. -DUSE_URDF_TUTORIAL=ON -DUSE_ABB_IRB2400=ON -DUSE_KUKA_LBR_IIWA=ON
问题&解决
Ubuntu16.04通过vcpkg安装glfw3时提示Build error
原因:需要其他依赖库[glfw3] Build error #30144
解决:sudo apt install libxinerama-dev libxcursor-dev xorg-dev libglu1-mesa-dev pkg-configUbuntu16.04通过vcpkg安装assimp时提示‘abs’ was not declared in this scope
原因:assimp库需要c++17标准
解决:升级编译工具Ubuntu16.04通过vcpkg安装urdfdom时提示urdfdom/tinyxml build failure
原因:curl版本太低或不支持ssl
解决:安装最新版本curl及openssl
最后
目前还未支持xacro的解析,自定义urdf文件可参考这里
如各位对opengl感兴趣,推荐这个网站
希望能邀请大家共同参与和完善此开源软件
这篇关于[mj_robot_sim]多关节机器人仿真软件介绍的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







