本文主要是介绍外骨骼机器人(六):阻抗控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、简介
刚性环境中,比较理想的混合运动-力控制要求机器人阻抗达到两种极端情况:理想的运动控制要求高阻抗(在外力干扰下,几乎没有运动的变化);而理想的力控制要求低阻抗(在运动干扰下,力几乎没有变化)。实际上,机器人可实现的阻抗范围是有限的。
本文探讨的是阻抗控制问题,也就是让机器人末端执行器呈现特定质量、弹簧和阻尼器特性。例如,用作触觉手术模拟器的机器人可以模拟虚拟手术器械与虚拟组织接触的质量、刚度和阻尼特性。
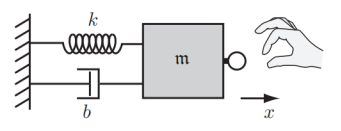
图1 单自由度机器人质量-弹簧-阻尼器虚拟环境
一个呈现出阻抗特性的单自由度机器人,如图1所示,可以写为:
m x ¨ + b x ˙ + k x =
这篇关于外骨骼机器人(六):阻抗控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




