本文主要是介绍PATRAN/NASTRAN中的坐标系,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
| 坐标系 | 说明 |
| Global System
| patran的全局(默认)矩形坐标系; 而NASTRAN的全局默认坐标系称为BASIC坐标系; |
| Local Systems | PATRAN的用户自定义坐标系; NASTRAN的用户自定义坐标系使用术语global system表示 |
| Reference Systems
| 几何定义参考的坐标系,可以是默认或用户自定的。 |
| Analysis Systems
| 求解器计算节点结果时使用的坐标系,节点的计算结果默认是存在这个坐标系中的 |
| Element Systems
| 各个单元自身的局部坐标系 |
| Projected Global System
| 专用于二维板壳单元转换显示结果时的坐标系 单元法向定义为Z轴 若单元法向与Global System的X轴间夹角大于0.01,X轴会投影至单元面上形成X轴;若夹角小于0.01,则Global System的Y/Z轴哪个与单元法向夹角大,哪个就是X轴; |
| Projected Systems
| 将Projected Global System规则中的Global System替换为指定的坐标系 |
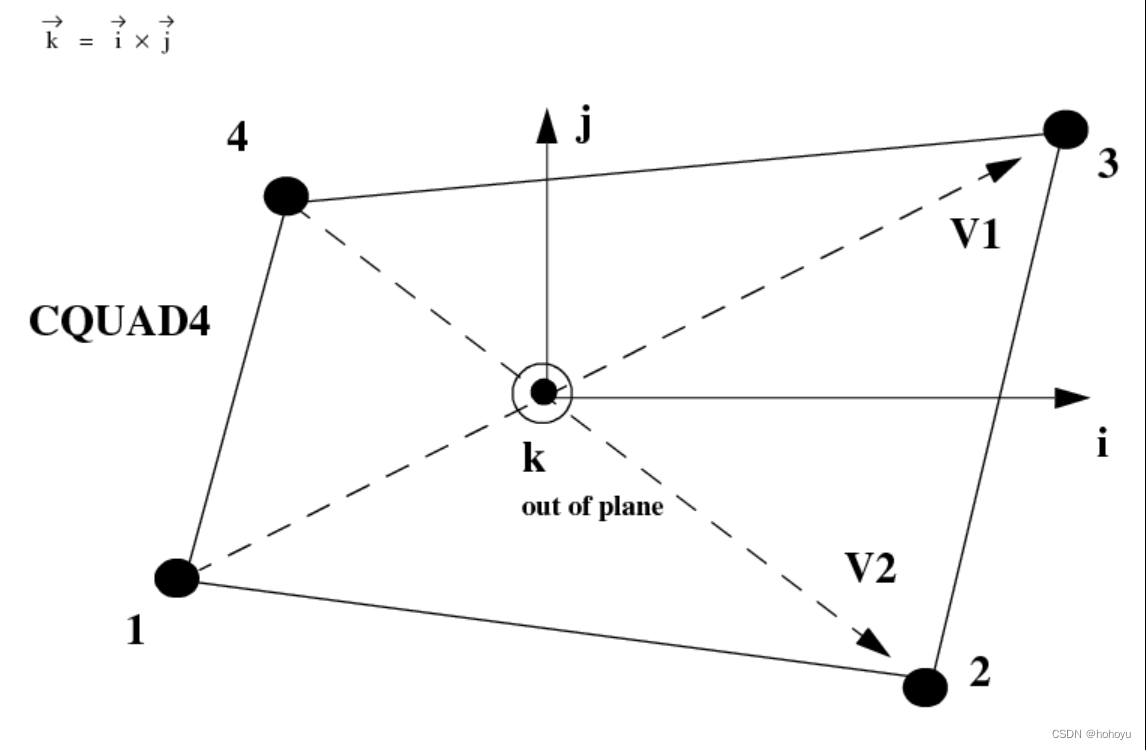
| Patran Element IJK
| 对不同拓扑类型单元不同。 其V1为由单元节点1指向节点2的矢量,V2为由单元节点1指向节点3的矢量; |
| Material Systems
| 将单元IJK或CQUAD4 Element Bisector坐标系绕K轴旋转材料定义角度得到的坐标系; 只有四边形和三角形单元有这个坐标系; |
| Element Bisector | 专用于CQUAD单元的坐标系
|
这篇关于PATRAN/NASTRAN中的坐标系的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!