本文主要是介绍中断实验(按键/光电开关/火焰传感器/人体红外),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
任务要求:1:把中断原因打印在串口工具上,比如按下key1,显示:key1_rq
2:按下key1、2、3时,LED1、2、3,状态反转(本来亮的熄灭,熄灭的点亮)
3:人体红外感应、火焰传感器、光电开关也和key1、2、3一样,与LED1、2、3一一对应
本实验采用的开发板为华清远见出品的STM32MP157开发板
本实验使用了STM32CubeMX软件进行工程搭建
首先设置端口复用,再把端口GPIO与EXTI连接
1. 配置LED1/LED2/LED3对应的按键为输出模式:PE10(key3)/PF10(key2)/PE8(key1),给M4核
2. 配置PF9/PF7/PF8/PE15/PF5/PF12为GPIO_EXTI模式,给M4核
为了输出文字,还要再把PB2设置为UART4_RX,PG11设置为UART4_TX
选择A->Z栏
选择GPIO,将按键key1、2、3对应的PE8、PF10、PE10设置为下降沿检测方式
选择EXTI,将所有EXTI设置中断使能
选择UART4,勾选蓝色框“Cortex-M4(Stm32Cube)”,再将模式设置为异步(Asynchronous)
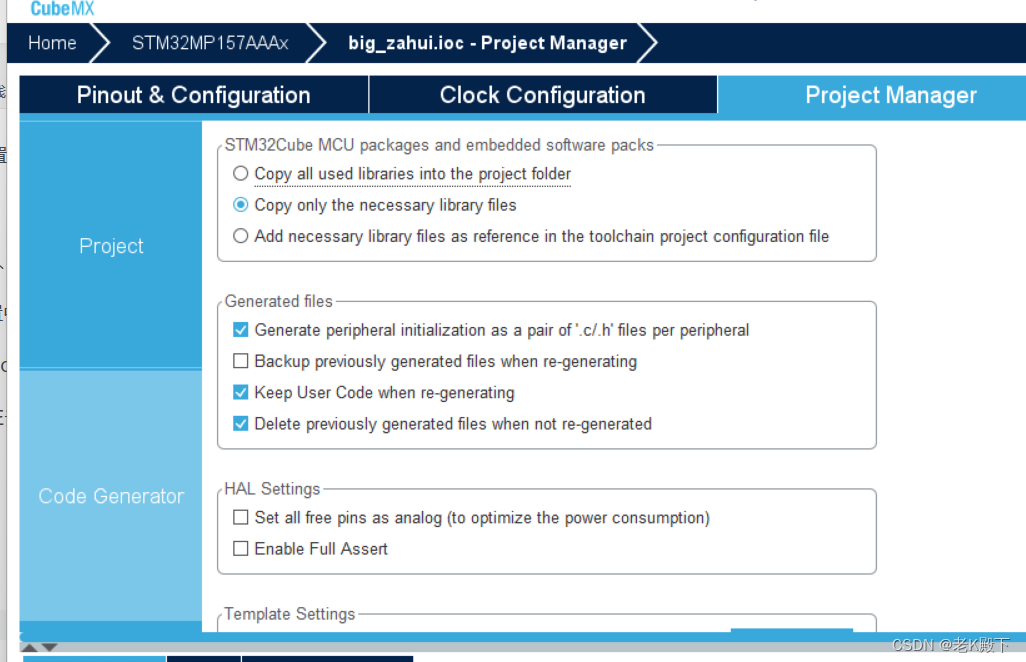
命名项目名,再把Toolchain / IDE设置为MDK-ARM、V5.27(keil 5)
再进行如下勾选后,导出文件
首先进行按键、LED灯与各个传感器之间的关联编程
代码位于gpio.c文件的
#include "gpio.h"/* USER CODE BEGIN 0 */
/*******************
* 代码写在这 *
*******************/
/* USER CODE END 0 *///下降沿
void HAL_GPIO_EXTI_Falling_Callback(uint16_t GPIO_Pin)
{switch(GPIO_Pin){//KEY2-->PF10case GPIO_PIN_7:HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_10); //LED灯状态翻转函数printf("key2_irq\n");break;//KEY3-->PE10case GPIO_PIN_8:HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_10);printf("key3_irq\n");break;//KEY1-->PE8case GPIO_PIN_9:HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_8);printf("key1_irq\n");break;}
}
//上升沿检测
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{switch(GPIO_Pin){//KEY2-->PF5case GPIO_PIN_5:HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_10);printf("fire_worning_irq\n");break;//KEY3-->PF12case GPIO_PIN_12:HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_10);printf(" Human_infrared_irq\n");break;//KEY1-->PE15case GPIO_PIN_15:HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_8);printf("Photoelectric_irq\n");break;}
}为了让提示打印在串口工具内,还需要在usart.c文件内编写如下代码,不然printf函数不会工作
#include "usart.h"/* USER CODE BEGIN 0 */
int fputc(int ch,FILE* stream)
{//判断发送寄存器是否为空while(!(huart4.Instance->ISR & (0x1 << 7)));//将要发送的数据放入到发送寄存器中huart4.Instance->TDR = ch;//判断是否为'\n'if(ch == '\n'){//判断发送寄存器是否为空while(!(huart4.Instance->ISR & (0x1 << 7)));huart4.Instance->TDR = '\r';}return ch;
}
/* USER CODE END 0 */这篇关于中断实验(按键/光电开关/火焰传感器/人体红外)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!