本文主要是介绍【论文翻译】(第四部分)The Fourier decomposition method for nonlinear and non-stationary time series analysis,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
4. Multivariate Fourier decomposition method
4. 多元傅里叶分解法
From (3.6) and (3.12), we observe that the operation that generates the FIBFs is actually the result of the Fourier method based ZPF. This is another motivation, in addition to the filter bank (FB) properties of IMFs, to use the Fourier or other methods of ZPF to decompose any data into a set of FIBFs. The ZPF of a real valued signal x [ n ] x[n] x[n] by a zero-phase filter h z [ n ] h_z[n] hz[n] can be obtained by two methods: (i) the convolution method, y [ n ] = x [ n ] ∗ h z [ n ] ⇒ Y [ k ] = X [ k ] H z [ k ] y[n]=x[n] \ast h_z[n]⇒Y[k]=X[k]H_z[k] y[n]=x[n]∗hz[n]⇒Y[k]=X[k]Hz[k], where h z [ n ] = h [ n ] ∗ h [ − n ] h_z[n]=h[n] \ast h[−n] hz[n]=h[n]∗h[−n] which implies H z [ k ] = ∣ H [ k ] ∣ 2 H_z[k]=|H[k]|^2 Hz[k]=∣H[k]∣2, for a real sequence h [ n ] h[n] h[n], (ii) the Fourier method where we set the frequency response of the zero-phase filter H z [ k ] = 1 H_z[k]=1 Hz[k]=1 at desired frequency band and H z [ k ] = 0 H_z[k]=0 Hz[k]=0 otherwise, and obtain output by the inverse DFT (IDFT) as y [ n ] = ∑ k = 0 N − 1 X [ k ] H z [ k ] exp ( j 2 π k n / N ) y[n]=\sum^{N−1} _{k=0}X[k]H_z[k] \exp(j2πkn/N) y[n]=∑k=0N−1X[k]Hz[k]exp(j2πkn/N), where X [ k ] = ( 1 / N ) ∑ k = 0 N − 1 x [ n ] exp ( − j 2 π k n / N ) X[k]=(1/N)\sum^{N−1} _{k=0} x[n] \exp(−j2πkn/N) X[k]=(1/N)∑k=0N−1x[n]exp(−j2πkn/N) is the DFT of x [ n ] x[n] x[n].
从(3.6)和式(3.12)可以看出,生成FIBFs的操作实际上是基于ZPF的傅里叶方法的结果。这是除了本征模态函数(IMFs)的滤波器组(FB)特性之外,使用傅里叶或ZPF的其他方法将任何数据分解为一组FIBFs的另一个动机。由零相位滤波器 h z [ n ] h_z[n] hz[n]获得的实值信号 x [ n ] x[n] x[n]的ZPF可以通过两种方法获得:
(i) 卷积方法, y [ n ] = x [ n ] ∗ h z [ n ] ⇒ Y [ k ] = X [ k ] H z [ k ] y[n]=x[n] \ast h_z[n]⇒Y[k]=X[k]H_z[k] y[n]=x[n]∗hz[n]⇒Y[k]=X[k]Hz[k],其中 h z [ n ] = h [ n ] ∗ h [ − n ] h_z[n]=h[n] \ast h[−n] hz[n]=h[n]∗h[−n],对一个实序列 h [ n ] h[n] h[n] 来说,有 H z [ k ] = ∣ H [ k ] ∣ 2 H_z[k]=|H[k]|^2 Hz[k]=∣H[k]∣2。
(ii) 傅里叶方法,其中我们在期望频段上设零相位滤波器的频率响应 H z [ k ] = 1 H_z[k]=1 Hz[k]=1 ,否则 H z [ k ] = 0 H_z[k]=0 Hz[k]=0 ,并且通过逆离散傅里叶变换(IDFT)获得输出为 y [ n ] = ∑ k = 0 N − 1 X [ k ] H z [ k ] exp ( j 2 π k n / N ) y[n]=\sum^{N−1} _{k=0}X[k]H_z[k] \exp(j2πkn/N) y[n]=∑k=0N−1X[k]Hz[k]exp(j2πkn/N),其中 X [ k ] = ( 1 / N ) ∑ k = 0 N − 1 x [ n ] exp ( − j 2 π k n / N ) X[k]=(1/N)\sum^{N−1} _{k=0} x[n] \exp(−j2πkn/N) X[k]=(1/N)∑k=0N−1x[n]exp(−j2πkn/N) 是 x [ n ] x[n] x[n]的离散傅里叶变换(DFT)。
We use ZPF, which doesn’t shift the essential features of a signal, and propose MFDM algorithm to generate MFIBFs and residues. We apply zero-phase high pass filtering (ZP-HPF) with cut-off frequency f c 1 f_{c1} fc1 to each of the components of the P-variate (P-channel) time series { x p ( t ) } p = 1 P \{x_p(t)\}^P _{p=1} {xp(t)}p=1P and obtain the first set of MFIBFs y p 1 ( t ) y_{p1}(t) yp1(t). The first set of residues is obtained as follows:
r p 1 ( t ) = x p ( t ) − y p 1 ( t ) , p = 1 , 2 , . . . , P . ( 4.1 ) r_{p1}(t)=x_p(t) − y_{p1}(t), p=1, 2,...,P. \quad (4.1) rp1(t)=xp(t)−yp1(t),p=1,2,...,P.(4.1)
我们使用不改变信号本质特征的ZPF算法,并提出了MFDM算法来生成MFIBFs和残差。我们将截止频率为 f c 1 f_{c1} fc1的零相位高通滤波(ZP-HPF)应用于P变量(P通道)时间序列 { x p ( t ) } p = 1 P \{x_p(t)\}^P _{p=1} {xp(t)}p=1P,获得第一组MFIBFs y p 1 ( t ) y_{p1}(t) yp1(t)。第一组残差由下式获得:
r p 1 ( t ) = x p ( t ) − y p 1 ( t ) , p = 1 , 2 , . . . , P . ( 4.1 ) r_{p1}(t)=x_p(t) − y_{p1}(t), p=1, 2,...,P. \quad (4.1) rp1(t)=xp(t)−yp1(t),p=1,2,...,P.(4.1)
Next, we apply ZP-HPF with cut-off frequency f c 2 f_{c2} fc2 to first set of residues r p 1 ( t ) r_{p1}(t) rp1(t) and obtain second set of MFIBFs y p 2 ( t ) y_{p2}(t) yp2(t). The second set of residues is obtained as
r p 2 ( t ) = r p 1 ( t ) − y p 2 ( t ) , p = 1 , 2 , . . . , P . ( 4.2 ) r_{p2}(t)=r_{p1}(t) − y_{p2}(t), p=1, 2,...,P. \quad (4.2) rp2(t)=rp1(t)−yp2(t),p=1,2,...,P.(4.2)
接下来,我们将截止频率为 f c 2 f_{c2} fc2 的ZP-HPF 应用于第一组残差 r p 1 ( t ) r_{p1}(t) rp1(t) 并且获得第二组MFIBFs y p 2 ( t ) y_{p2}(t) yp2(t)。第二组残差由下式获得:
r p 2 ( t ) = r p 1 ( t ) − y p 2 ( t ) , p = 1 , 2 , . . . , P . ( 4.2 ) r_{p2}(t)=r_{p1}(t) − y_{p2}(t), p=1, 2,...,P. \quad (4.2) rp2(t)=rp1(t)−yp2(t),p=1,2,...,P.(4.2)
We can repeat this ZP-HPF procedure l l l times and obtain the final set of MFIBFs y p l ( t ) y_{pl}(t) ypl(t) and residues (with cut-off frequency f c l f_{cl} fcl)
r p l ( t ) = r p ( l − 1 ) ( t ) − y p l ( t ) p = 1 , 2 , . . . , P . ( 4.3 ) r_{pl}(t)=r_{p(l−1)}(t) − y_{pl}(t) p=1, 2,...,P. \quad (4.3) rpl(t)=rp(l−1)(t)−ypl(t)p=1,2,...,P.(4.3)
我们可以重复这个 ZP-HPF 程序 l l l 次,并获得最后一组 MFIBFs y p l ( t ) y_{pl}(t) ypl(t) 和残差 (其截止频率为 f c l f_{cl} fcl)
r p l ( t ) = r p ( l − 1 ) ( t ) − y p l ( t ) p = 1 , 2 , . . . , P . ( 4.3 ) r_{pl}(t)=r_{p(l−1)}(t) − y_{pl}(t) p=1, 2,...,P. \quad (4.3) rpl(t)=rp(l−1)(t)−ypl(t)p=1,2,...,P.(4.3)
Through the addition of (4.1)–(4.3) we obtain an expression, similar to (2.1), for a P-variate time series as
x p ( t ) = ∑ i = 1 l y p i ( t ) + r p l ( t ) , p = 1 , 2 , . . . , P . ( 4.4 ) x_p(t)= \displaystyle\sum _{i=1} ^l y_{pi}(t) + r_{pl}(t), p=1, 2,...,P. \quad(4.4) xp(t)=i=1∑lypi(t)+rpl(t),p=1,2,...,P.(4.4)
将(4.1)-(4.3)相加,得到与(2.1)类似的p变量时间序列表达式为:
x p ( t ) = ∑ i = 1 l y p i ( t ) + r p l ( t ) , p = 1 , 2 , . . . , P . ( 4.4 ) x_p(t)= \displaystyle\sum _{i=1} ^l y_{pi}(t) + r_{pl}(t), p=1, 2,...,P. \quad(4.4) xp(t)=i=1∑lypi(t)+rpl(t),p=1,2,...,P.(4.4)
When we use the Fourier-based ZPF to obtain MFIBFs, as in (3.6), the first three conditions (definition3.1) of FIBFs are fully satisfied and the fourth one is approximately satisfied. Obviously, the fourth condition of FIBFs cannot be guaranteed simultaneously for all the P-channel data. This is similar to the problem encountered in multivariate EMD (MEMD) algorithm in which, the first condition of IMF is not imposed in the derivation of multivariate IMFs [11].
当我们使用基于傅里叶的ZPF来获得MFIBFs时,如(3.6),FIBFs的前三个条件(定义3.1)完全满足,而第四个条件近似满足。显然,对于所有P通道数据,FIBFs的第四个条件不能同时得到保证。这与多变量EMD (MEMD)算法中遇到的问题相似,在推导多变量IMFs[11]时,没有施加IMF的第一个条件。
The question is, how can cut-off frequencies (CFs) f c 1 , f c 2 , . . . , f c l f_{c1},f_{c2},...,f_{cl} fc1,fc2,...,fcl corresponding to zero-phase high pass filters h z 1 ( t ) , h z 2 ( t ) , . . . , h z l ( t ) h_{z1}(t),h_{z2}(t),...,h_{zl}(t) hz1(t),hz2(t),...,hzl(t) be obtained? There are various ways in which these cut-off frequencies can be selected, e.g. dyadic ( f c 1 = f M / 2 , f c 2 = f M / 2 2 , . . . , f c l = f M / 2 l f_{c1}=f_M/2,f_{c2}=f_M/2^2, ..., f_{cl}=f_M/ 2^l fc1=fM/2,fc2=fM/22,...,fcl=fM/2l , where f M f_M fM is the maximum frequency of a signal x ( t ) x(t) x(t) and for the sampled signal, maximum frequency is ( F s / 2 ) (F_s/2) (Fs/2) half of the sampling frequency), non-dyadic, uniform and non-uniform CFs. We can take the FT of a signal x ( t ) x(t) x(t) to obtain its spectrum details and develop a strategy to decide CFs.
问题是,截止频率 (CFs) f c 1 , f c 2 , . . . , f c l f_{c1},f_{c2},...,f_{cl} fc1,fc2,...,fcl 对应的零相位高通滤波器 h z 1 ( t ) , h z 2 ( t ) , . . . , h z l ( t ) h_{z1}(t),h_{z2}(t),...,h_{zl}(t) hz1(t),hz2(t),...,hzl(t) 如何获得? 有多种方法可以选择截止频率,例如二分法( f c 1 = f M / 2 , f c 2 = f M / 2 2 , . . . , f c l = f M / 2 l f_{c1}=f_M/2,f_{c2}=f_M/2^2, ..., f_{cl}=f_M/ 2^l fc1=fM/2,fc2=fM/22,...,fcl=fM/2l ,其中 f M f_M fM 是信号 x ( t ) x(t) x(t) 的最大频率,对于采样信号而言,最大频率是 ( F s / 2 ) (F_s/2) (Fs/2) 及采样信号的一半),非二分的,均匀的,非均匀的 CFs。 我们可以对信号 x ( t ) x(t) x(t)进行傅立叶变换,以获得其频谱细节,并制定策略来决定CFs。
For a narrowband signal, we define the ratio of centre frequency ( f ~ C i \tilde f_{Ci} f~Ci) to bandwidth (BW) as
m = f ~ C i ( f H i − f L i ) , f ~ C i = ( f H i + f L i ) 2 , ( 4.5 ) m= \frac {\tilde f_{Ci}} {(f_{Hi}− f_{Li})}, \tilde f_{Ci}= \frac{(f_{Hi}+ f_{Li})} {2} ,\quad (4.5) m=(fHi−fLi)f~Ci,f~Ci=2(fHi+fLi),(4.5)
where f H i f_{Hi} fHi is the highest frequency and f L i f_{Li} fLi is the lowest frequency of ith band of a filter bank. From (4.5), we obtain
f L i = [ ( 2 m − 1 ) ( 2 m + 1 ) ] f H i , m > 1 2 . ( 4.6 ) f_{Li}= [ \frac{(2m − 1)} {(2m + 1)} ] f_{Hi}, m> \frac12. \quad (4.6) fLi=[(2m+1)(2m−1)]fHi,m>21.(4.6)
对于窄带信号,我们将中心频率 ( f ~ C i \tilde f_{Ci} f~Ci) 与带宽 (BW) 之比定义为
m = f ~ C i ( f H i − f L i ) , f ~ C i = ( f H i + f L i ) 2 , ( 4.5 ) m= \frac {\tilde f_{Ci}} {(f_{Hi}− f_{Li})}, \tilde f_{Ci}= \frac{(f_{Hi}+ f_{Li})} {2} ,\quad (4.5) m=(fHi−fLi)f~Ci,f~Ci=2(fHi+fLi),(4.5)
其中 f H i f_{Hi} fHi 是滤波器组第i个频带的最高频率, f L i f_{Li} fLi 是滤波器组第i个频带的最低频率。由 (4.5),我们可以获得
f L i = [ ( 2 m − 1 ) ( 2 m + 1 ) ] f H i , m > 1 2 . ( 4.6 ) f_{Li}= [ \frac{(2m − 1)} {(2m + 1)} ] f_{Hi}, m> \frac12. \quad (4.6) fLi=[(2m+1)(2m−1)]fHi,m>21.(4.6)
From (4.5) and (4.6), we observe that the ratios, for the consecutive ith and (i + 1)th bands, of centre frequencies f ~ C i \tilde f_{Ci} f~Ci, cut-off frequencies f c i f_{ci} fci and BWs ( f H i − f L i f_{Hi}− f_{Li} fHi−fLi) can be taken as a constant, that is
f ~ C i f ~ C i + 1 = f c i f c i + 1 = ( f H i − f L i ) ( f H i + 1 − f L i + 1 ) = l . ( 4.7 ) \frac {\tilde f_{Ci}} {\tilde f_{Ci}+1} =\frac {f_{ci}} {f_{ci}+1} = \frac{(f_{Hi}− f_{Li})} {(f_{Hi+1}− f_{Li+1})}=l. \quad(4.7) f~Ci+1f~Ci=fci+1fci=(fHi+1−fLi+1)(fHi−fLi)=l.(4.7)
从(4.5)和(4.6),我们观察到,对于连续的第ith和第(i + 1)频带,中心频率 f ~ C i \tilde f_{Ci} f~Ci、截止频率 f c i f_{ci} fci和BWs ( f H i − f L i f_{Hi}− f_{Li} fHi−fLi)的比值可以取为常数,即
f ~ C i f ~ C i + 1 = f c i f c i + 1 = ( f H i − f L i ) ( f H i + 1 − f L i + 1 ) = l . ( 4.7 ) \frac {\tilde f_{Ci}} {\tilde f_{Ci}+1} =\frac {f_{ci}} {f_{ci}+1} = \frac{(f_{Hi}− f_{Li})} {(f_{Hi+1}− f_{Li+1})}=l. \quad(4.7) f~Ci+1f~Ci=fci+1fci=(fHi+1−fLi+1)(fHi−fLi)=l.(4.7)
From (4.5) to (4.7), we obtain l = ( 2 m + 1 ) / ( 2 m − 1 ) l=(2m + 1)/(2m − 1) l=(2m+1)/(2m−1) or m = ( 1 / 2 ) ( l + 1 ) / ( l − 1 ) m=(1/2)(l + 1)/(l − 1) m=(1/2)(l+1)/(l−1) with l > 1 l>1 l>1, and as [ m → ∞ , l → 1 ] , [ m → 1 / 2 , l → ∞ ] [m→∞, l→1], [m→1/2, l→∞] [m→∞,l→1],[m→1/2,l→∞]. We have the the liberty to select any suitable value of l l l or m m m, and the greater the value of m m m (or lesser the value of l l l) the narrower the band. In the case of a dyadic FB, l = 2 l=2 l=2 and m = 1.5 m=1.5 m=1.5 are fixed values. If required, we can vary the value of m m m (or l l l) for each band rather than taking the fixed value. Thus, we propose a compact way to decide cut-off frequencies, as summarized in table 3.
从(4.5) 到 (4.7),我们可以得到 l = ( 2 m + 1 ) / ( 2 m − 1 ) l=(2m + 1)/(2m − 1) l=(2m+1)/(2m−1) , m = ( 1 / 2 ) ( l + 1 ) / ( l − 1 ) m=(1/2)(l + 1)/(l − 1) m=(1/2)(l+1)/(l−1) 其中 l > 1 l>1 l>1,并且当 [ m → ∞ , l → 1 ] , [ m → 1 / 2 , l → ∞ ] [m→∞, l→1], [m→1/2, l→∞] [m→∞,l→1],[m→1/2,l→∞]时,我们可以自由地选择任意合适的 l l l 或 m m m 值, m m m 值越大(或者 l l l 值越小) 波段越窄。对于二元 FB, l = 2 l=2 l=2, m = 1.5 m=1.5 m=1.5 是固定值。如果需要,我们可以改变每个波段的 m m m ( 或 l l l )值,而不是取固定的值。因此,我们提出了一种简洁的方法来决定截止频率,如表3所示。
Table 3. An algorithm to obtain cut-off frequencies $f_{ci}.
- Select suitable value of m m m and set f H 1 = F s / 2 f_{H1}=Fs/2 fH1=Fs/2.
- Set $f_{ci}=[(2m − 1)/(2m + 1)]f_{Hi}.
- Set f H i + 1 = f c i f_{Hi+1}=f_{ci} fHi+1=fci.
- Repeat step 2 to 3 for i = 1 , 2 , . . . , l i =1, 2,...,l i=1,2,...,l.
表格 3. 一个获得截止频率 $f_{ci} 的算法。
- 选择合适的 m m m 值并设 f H 1 = F s / 2 f_{H1}=Fs/2 fH1=Fs/2。
- 设 $f_{ci}=[(2m − 1)/(2m + 1)]f_{Hi}。
- 设 f H i + 1 = f c i f_{Hi+1}=f_{ci} fHi+1=fci。
- 在 i = 1 , 2 , . . . , l i =1, 2,...,l i=1,2,...,l 时,重复步骤 2 到 3 。
In MFDM, we can use zero-phase low pass filtering (ZP-LPF) in place of ZP-HPF to decompose a signal in order of residue to the first MFIBFs, that is r p l ( y ) , y p l ( t ) , . . . , y p 1 ( t ) r_{pl}(y),y_{pl}(t),...,y_{p1}(t) rpl(y),ypl(t),...,yp1(t). We use ZPF as it preserves salient features (such as maxima and minima) in the filtered time waveform exactly at the time where these features occur in the unfiltered waveform. It is pertinent to note that the conventional (non-zero phase) filtering shifts feature in a signal and hence cannot be employed. The ZPF of time series can be obtained through the non-causal finite impulse response (FIR) or infinite impulse response (IIR) filters.
在MFDM,我们可以使用零相位低通滤波(ZP-LPF)来代替ZP-HPF,将信号按照残差的顺序分解到第一个 MFIBFs 中,即 r p l ( y ) , y p l ( t ) , . . . , y p 1 ( t ) r_{pl}(y),y_{pl}(t),...,y_{p1}(t) rpl(y),ypl(t),...,yp1(t)。我们使用ZPF,因为它保留了滤波后的时间波形中的显著特征(如最大值和最小值),正好与这些特征出现在未滤波波形中的时间相同。
需要注意的是,传统的(非零相位)滤波会使信号发生偏移,因此无法使用。时间序列的ZPF可以通过非因果有限脉冲响应(FIR)或无限脉冲响应(IIR)滤波器获得。
As for the MEMD and noise-assisted MEMD (NA-MEMD) [19], the proposed MFDM algorithm produces equal numbers of scale-aligned MFIBFs for all the channels, preserving joint channel properties that make it suitable for direct multichannel modelling. The proposed FDM does not suffer from mode mixing, detrend uncertainty and end effect artefacts as extraction of FIBFs does not depend on distribution of local extrema across the range of signal. A comparison of the EMD algorithm with Fourier and Wavelet is presented in [32] (the first four columns of the table 4) using the basis function, frequency computation, uncertainty principle, presentation of results, nonlinearity and non-stationarity of data, harmonics present in the signal representation and theoretical base of the methods. We use the same parameters to present comparisons among the Fourier, Wavelet, EMD and FDM for data analysis in table 4.
对于MEMD和噪声辅助的MEMD (NA-MEMD)[19],提出的MFDM算法为所有信道产生相同数量的尺度对齐MFIBFs,保留了联合信道的特性,使其适合直接多信道建模。因为 FIBFs 的提取不依赖于信号范围内局部极值的分布,所以所提出的FDM不受模式混叠、去趋势不确定性和末端效应干扰的影响。在 [32] (表4的前四列)中,使用基函数、频率计算、不确定性原则、结果表示、数据的非线性和非平稳性、信号表示中存在的谐波以及方法的理论基础,对经验模态分解(EMD)算法与傅立叶和小波方法进行了比较。在表4中,我们使用相同的参数来对傅里叶、小波、经验模态分解(EMD)和FDM的数据分析进行比较。
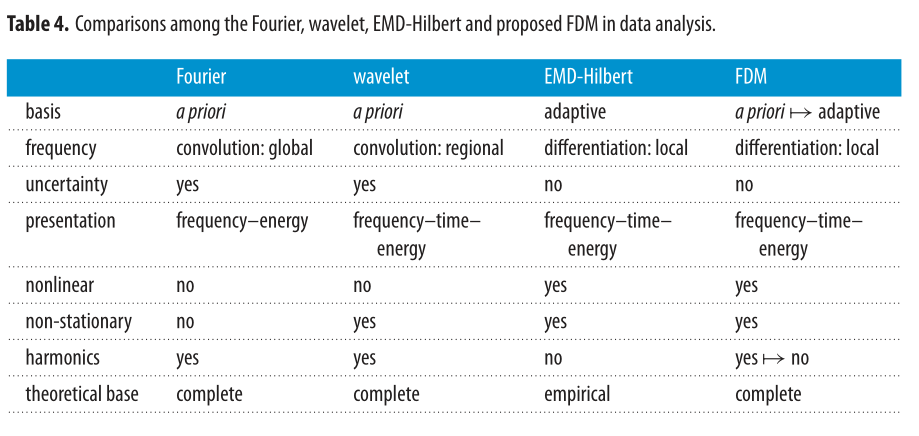
表格七个参数分别为:基函数、频率计算、不确定性原则、结果表示、数据的非线性、非平稳性、信号表示中存在的谐波、方法的理论基础。
傅里叶:先验的、全局卷积、不确定、频率-能量、线性、平稳、有谐波、理论基础完整。
小波:先验的、区域卷积、不确定、频率-时间-能量、线性、非平稳、有谐波、理论基础完整。
经验模态分解-希尔伯特变换:自适应的、局部微分、确定的、频率-时间-能量、非线性、非平稳、无谐波、理论基础根据经验。
FDM:先验到自适应、局部微分、确定的、频率-时间-能量、非线性、平稳到非平稳、有谐波到无谐波、理论基础完整。
这篇关于【论文翻译】(第四部分)The Fourier decomposition method for nonlinear and non-stationary time series analysis的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



