nonlinear专题

Cg Programming/Unity/Nonlinear Deformations非线性变形
本教程介绍顶点混合作为非线性变形的一个例子。主要的应用实际就是蒙皮网格的绘制。 虽然本教程不是基于其它任何指定的教程上的,对章节“顶点变换”的理解还是非常有用的。 在两个模型变换之间混合 大多数网格的变形不能用章节“顶点变换”中讨论的4×4矩阵的仿射变换来建模。虚构的变形场对空间的变形只是其中的一个例子。计算机图形中最重要的例子就是当连接点弯曲时网格的变形,比如肘或膝盖。 本教程介绍了

Event-Triggered H∞ Control for Continuous-Time Nonlinear System via Concurrent Learning
摘要 本文利用事件触发法研究了一类连续时间非线性系统的H∞最优控制问题。 ①首先,H∞最优控制问题被公式化为二人零和(ZS)差分博弈。 ②然后,利用事件触发的控制策略和时间触发的干扰策略,为ZS博弈导出自适应触发条件。仅当不满足触发条件时才更新事件触发的控制器。因此,减少了设备与控制器之间的通信。 ③此外,提供最小采样时间的正下界以避免Zeno行为。 ④为了实现目的,提出了事件触发的并发学习算法
NARX (Nonlinear autoregressive with external input) neural network学习
先看Wikipedia中的简要介绍:Nonlinear autoregressive exogenous model In time series modeling, a nonlinear autoregressive exogenous model (NARX) is a nonlinear autoregressive model which has exogenous inputs. T

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(二)
文章目录 TASK系列解析文章OptimizeByNLP1.get_nlp_info()定义问题规模2.get_bounds_info()定义约束边界约束3.get_starting_point()定义初值4.eval_f()求解目标函数5.eval_grad_f()求解梯度6.eval_g()求解约束函数7.eval_jac_g()求解约束雅可比矩阵8.eval_h()求解黑塞矩阵9. f

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(一)
文章目录 TASK系列解析文章前言PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER功能介绍PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER流程确定优化变量定义目标函数定义约束ProcessSetUpStatesAndBoundsOptimiz
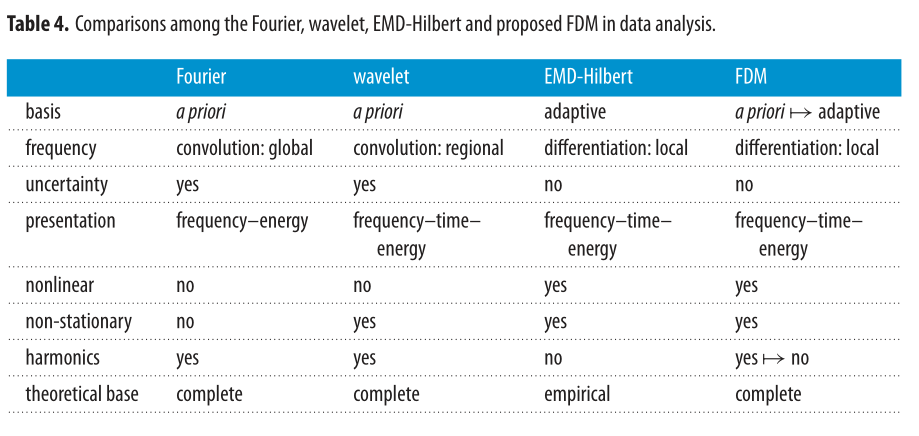
【论文翻译】(第四部分)The Fourier decomposition method for nonlinear and non-stationary time series analysis
4. Multivariate Fourier decomposition method 4. 多元傅里叶分解法 From (3.6) and (3.12), we observe that the operation that generates the FIBFs is actually the result of the Fourier method based ZPF. This is