本文主要是介绍HDLbits: Fsm serial,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
根据题意设计了四个状态,写出代码如下:
module top_module(input clk,input in,input reset, // Synchronous resetoutput done
); parameter IDLE = 3'b000, START = 3'b001, DATA = 3'b010, STOP = 3'b100, bit_counter_end = 4'd7;reg [2:0] state,next_state;reg [3:0] bit_counter;always@(*)begincase(state)START: next_state = DATA;DATA: next_state = (bit_counter >= bit_counter_end)? (in?STOP:IDLE):DATA;STOP: next_state = in?IDLE:START;IDLE: next_state = in?IDLE:START;default: next_state = IDLE;endcaseendalways@(posedge clk)beginif(reset)state <= IDLE;elsestate <= next_state;endalways@(posedge clk)beginif(reset)bit_counter <= 4'd0; else if(state == DATA)bit_counter <= bit_counter + 4'd1; elsebit_counter <= 4'd0;endassign done = (state == STOP); endmodule
时序图如下,有误:
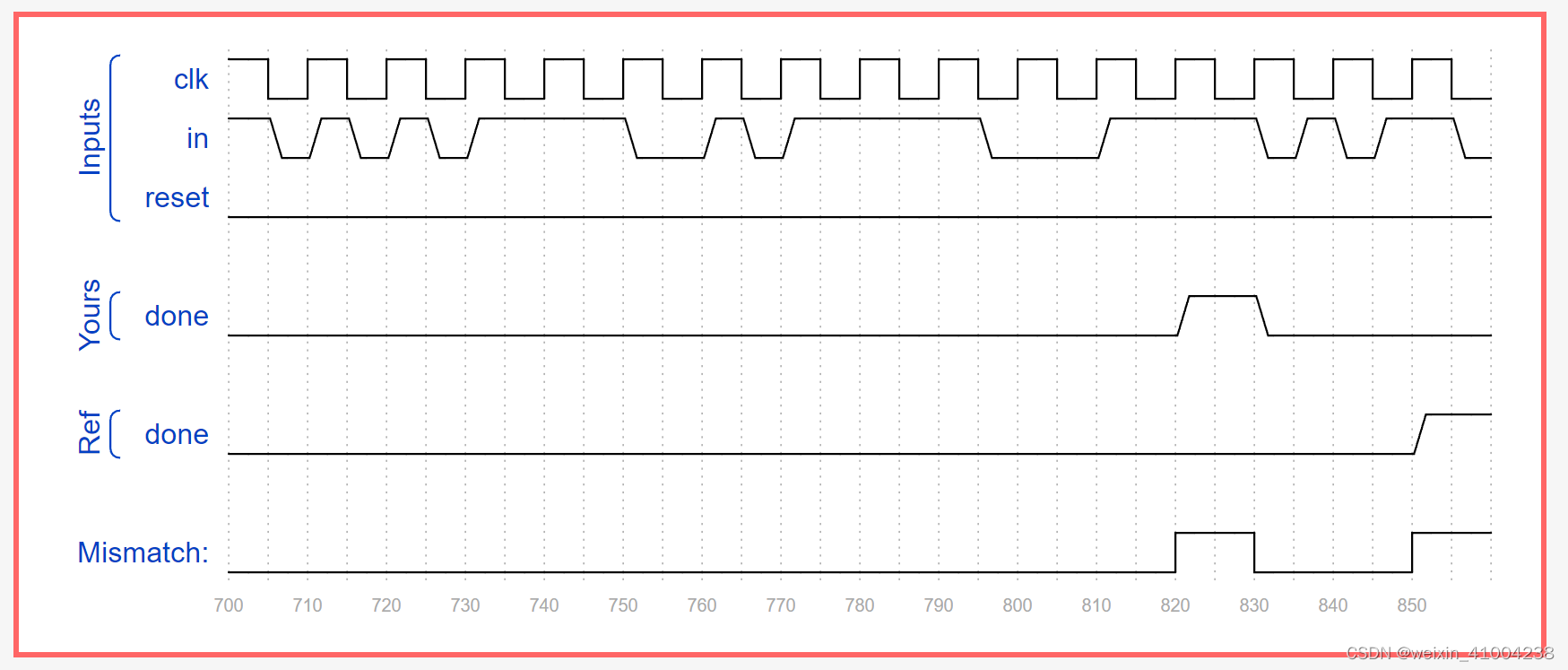
参考网上的答案,加入了一个ERROR状态表示例题时序图"?"的时候,下面代码没问题了
注意bit_counter计数的那块如果用state==DATA判断,那么上面长度判断就得用7,如果用next_state==DATA判断,上面长度判断就得用8
module top_module(input clk,input in,input reset, // Synchronous resetoutput done
); parameter IDLE = 4'b0000, START = 4'b0001, DATA = 4'b0010, STOP = 4'b0100, ERROR = 4'b1000, bit_counter_end = 4'd7;reg [3:0] state,next_state;reg [3:0] bit_counter;always@(*)begincase(state)START: next_state = DATA;DATA: next_state = (bit_counter >= bit_counter_end)? (in?STOP:ERROR):DATA;STOP: next_state = in?IDLE:START;ERROR: next_state = in?IDLE:ERROR;IDLE: next_state = in?IDLE:START;default: next_state = IDLE;endcaseendalways@(posedge clk)beginif(reset)state <= IDLE;elsestate <= next_state;endalways@(posedge clk)beginif(reset)bit_counter <= 0; else if(state == DATA) bit_counter <= bit_counter + 1;elsebit_counter <= 0;endassign done = (state == STOP); endmodule
这篇关于HDLbits: Fsm serial的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!