本文主要是介绍P15 ROS 云台指令,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 文章说明
- 声明
- 1.物理接口
- 2.指令及软件编写
- 2.1指令格式及规则简介
- 2.2测试节点
- 2.2.1 节点串口设置及说明
- 2.2.2 常用命令汇总
- 2.3软件编写
- 2.4软件使用
文章说明
声明
如若转载,请附转载地址并声明原作者。此项目在 Azure DevOps 托管,所有的资料包括datasheet都在 Azure DevOps 托管,托管地址。若链接失效请向作者索要。邮箱:dreamdonghui@163.com
作者还拥有个人公众号,会写一些感悟文章,知圈,二维码如下,欢迎扫描关注:

1.物理接口
外观三视图:

接口定义:

pin1: 电源地线
pin2:+24V电源
pin3:RS-485 Tx/Rx-
pin4:RS-485 Tx/Rx+
pin5:信号地(可不接)
注意:由于供应商的原因,厂家并不能保证Pin3和Pin4的顺序!!!若连接不上,请交叉信号线。

2.指令及软件编写
2.1指令格式及规则简介
每个节点(轴)都有独立唯一的地址,地址码在指令的最前面,地址从ASCII码的0x41至0x60,即“A”至“`”。
2.2测试节点
2.2.1 节点串口设置及说明
默认波特率设置:9600,N,8,1
各节点作为从机,计算机作为主机。
各节点间不会发送指令相关信息。
等待节点返回确认信息(echo)后再发送下一字节。
节点返回确认信息时无法监听主机指令。
访问不同的节点前一定要保证之前的命令已发送完整。
2.2.2 常用命令汇总
上下: B
左右: A
指令(以左右A 为例):
旋转(必须发送停止命令方可停止)
顺时针一直走:A-001 (后三位为速度,可选值为001-080 001 最慢)
逆时针一直走:A+001 (后三位为速度,可选值为001-080 001 最慢)
停止(云台接到此指令后立即停止)
As128 (后三位可选001-128,代表急停渴望度。 128 为立即停止)
到达某一固定位置
Ap500 (后三位的值是算出来的,测试可用400-600,其中500 为中立位值)
Echo 使能
Ae000 disable
Ae001 enable
2.3软件编写
由于进度需要,研发进度较紧,未记录开发过程,请自行参见代码仓。
配置界面如下,主要提供开放端口:

操作界面如下:
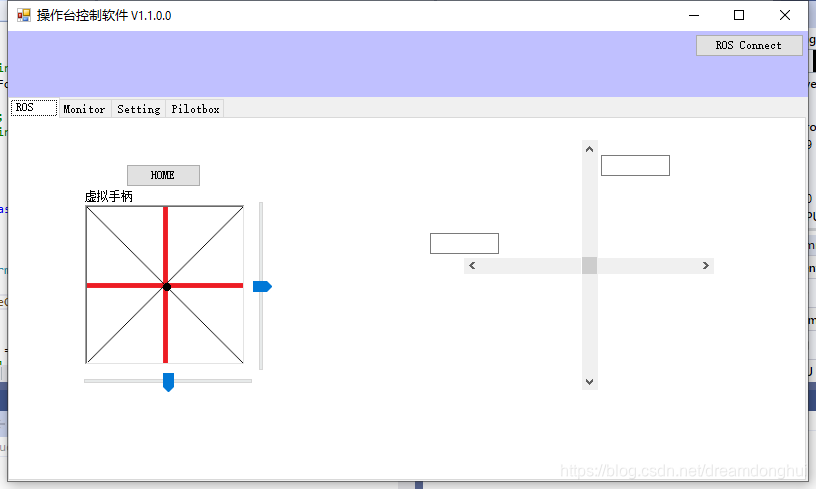
其中,左侧为虚拟的控制手柄,右侧为实时反馈的实际位置。
2.4软件使用
在配置页设置好参数后,返回ROS页,
- 点击home按键返回home点。注意:home点为相对的,如果机器卡死堵转会影响home点,要校正。
- 拖动虚拟十字手柄正中的小黑点可以实时控制机械手。
- 单独拖动左侧的侧条可以单独控制X轴或Y轴。
- 右侧为显示反馈,禁止输入。
这篇关于P15 ROS 云台指令的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





