本文主要是介绍机器人革命:脑洞大开的前沿机器人技术!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原创 | 文 BFT机器人
01
由生物启发的多模式移动形态机器人
在一个不断运动的世界中,一种新开发的名为M4(多模式移动形态机器人)的机器人展示了在包括滚动、飞行和行走在内的八种不同运动模式之间切换的能力。这款机器人由加州理工学院自主系统与技术中心(CAST)和东北大学的研究人员设计,它可以根据环境自主调整其运动策略。由工程师Mory Gharib和Alireza Ramezani创建的M4项目旨在通过利用可适应的组件和人工智能的组合来增强机器人的运动能力。这一创新的机器人可以应用于医疗运输和行星探测。

多模式移动形态机器人M4
02
帮助视障人士的创新机器人导航方法
谈到移动,汉堡应用科学大学的研究人员提出了一种基于OpenStreetMap数据的移动机器人辅助系统的创新导航算法。该算法解决了视力受损者在陌生路线导航中面临的挑战。通过采用包括地图验证、增强和生成可导航图的三个阶段过程,该算法优化了这一用户群体的导航。该研究突显了OpenStreetMap数据提升视力受损者导航应用的潜力,具有通过数据验证和增强来满足特定用户需求的机器人解决方案进步的影响。

这辆自动驾驶车辆的目标是为视力受损者提供导航引导
03
增强机器人动态环境控制能力的独特技术
在探讨新环境的同时,麻省理工学院和斯坦福大学的研究人员开发了一种新颖的机器学习技术,用于增强机器人(如无人机和自动驾驶车辆)在快速变化的环境中的控制能力。这种方法可以为复杂动态(如飞行器受风影响)创建有效的控制策略。这项技术在各种应用中具有潜力,从使自动驾驶车辆能够适应滑溜的道路条件,到提高无人机在恶劣风条件下的性能。通过整合学得的动态和面向控制的结构,研究人员的方法提供了一种更高效、更有效的机器人控制方法,对机器人领域中各种类型的动力系统具有重要意义。

机器人可以在不同环境中具有更好的控制能力
04
拥有可折叠足部的穿越机器人
机器人在地面上的应用领域有一段时间以来一直在不断改进,但现在它们也在地下空间取得进展。加州大学伯克利分校和加州大学圣克鲁斯分校的研究人员揭示了一种利用受折纸启发的可折叠足部来在颗粒环境中导航的新型机器人方法。这种方法汲取了生物系统的灵感,利用往复挖掘技术实现精确的定向运动。通过使用简单的线性执行器和passively 、各向异性力响应,为机器人的简化挖掘铺平了道路,为简化而有效的地下探索和导航提供了可能性。将折纸原理与机器人技术创新集成,为地下应用提供了更先进的可能性。
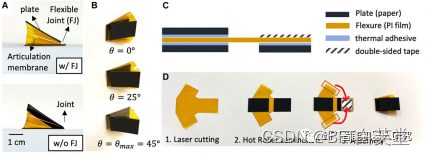
可折叠足部的原型和其制造方法
05
农业机器人领域的创新过程
在农业领域,卡内基梅隆大学的一位研究人员最近在硕士论文中探讨了科学表型和农业机器人技术之间的协同关系。他们的研究深入探讨了准确的植物性状测量在改良植物品种方面的重要作用,同时也突显了农业领域中机器人植物操作的前景。在构想先进的农业实践时,研究人员强调了由机器人执行的修剪、授粉和收获等任务。通过提出创新方法,如用于种子计数和藤蔓分割的3D云评估,该研究旨在简化农业机器人的数据收集过程。此外,创建和使用3D骨骼藤蔓模型展示了优化葡萄质量和产量的潜力,为更高效的农业实践铺平了道路。
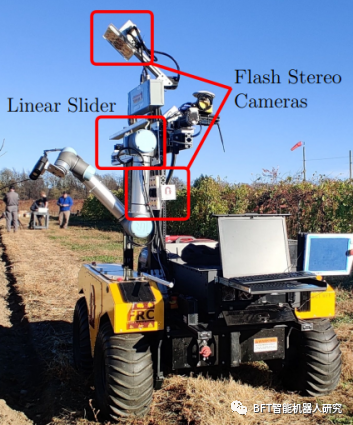
一种机器人数据捕获平台
06
软体机器人导管辅助改善微创手术
将焦点转向手术领域,马里兰大学、约翰霍普金斯大学和马里兰大学医学院的机械工程师和医学研究人员团队开发了一种气动驱动的软体机器人导管系统,用于增强微创手术中的控制。该系统允许外科医生同时高精度地插入和弯曲导管尖端,潜在地提高了需要穿越狭窄和复杂体腔的手术中的结果。研究人员的方法通过气动驱动简化了机械和控制架构,实现了在无需手动通道增压的情况下直观地控制弯曲和插入。该系统在测试中表现出在准确到达圆柱形目标方面的潜力,有助于初学者和熟练外科医生。

图示制造和操作软体机器人导管尖端,使用打印工艺制造致动器,并使用气动增压来控制导管的弯曲
07
机器人系统提高了家禽处理效率
在食品领域,研究人员推出了一种创新的机器人系统,旨在高效地从杂乱的容器中挑选和放置形状不一的部位。该架构集成了多个模块,实现了对娇嫩的家禽部位的精确操纵。这一进展有望彻底改革肉类加工和更广泛的食品行业,满足了对增加自动化的需求。
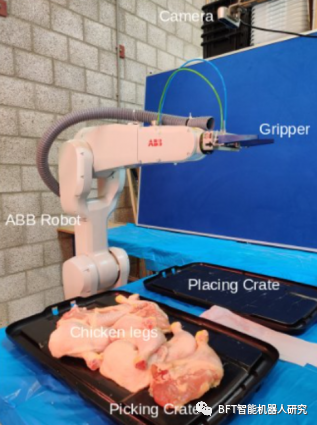
一个实验设置场景
作者 | LJH
排版 | 小河
审核 | 猫
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。
这篇关于机器人革命:脑洞大开的前沿机器人技术!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!