本文主要是介绍具有末端撞击角度约束的制导律仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
张友安提出一种具有末端撞击角度约束的制导律:
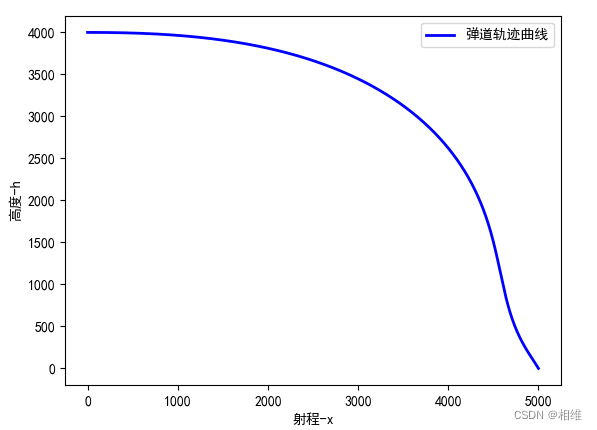
导弹初始条件:
V=300;theta = 0;x = 0; y = 4000;
目标位置:tx = 5000;ty=0;
期望撞击角:theta_f = -60度
仿真结果:

这篇关于具有末端撞击角度约束的制导律仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍具有末端撞击角度约束的制导律仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
张友安提出一种具有末端撞击角度约束的制导律:
导弹初始条件:
V=300;theta = 0;x = 0; y = 4000;
目标位置:tx = 5000;ty=0;
期望撞击角:theta_f = -60度
仿真结果:
这篇关于具有末端撞击角度约束的制导律仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/201872。
23002807@qq.com





