本文主要是介绍基于MSP430F5529单片机实现HC-SR04超声波测距 CCS IAR,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于MSP430F5529单片机实现HC-SR04超声波测距 CCS & IAR
- 项目介绍
- 项目准备
- 实现原理
- 软件设计
- UCS设置
- USCI_UART设置
- TIMER_A设置
- 主函数
- 测试结果
- 总结
- 附录
- 温度补偿
如需《ccs软件使用方法》 请联系群主或管理员,群号:176242843 。
2019.07.21更新:
可在qq群下载基于MSP430G2553单片机的HC-SR04超声波测距程序,测距原理与本文一致,开发环境为CCS,可快速移植到IAR。
2019.06.19更新:
可在qq群下载基于CCS & IAR开发环境编写的程序。
项目介绍
本设计基于TI公司的MSP430F5529单片机与超声波测距模块HC-SR04实现距离测量,使用ccs软件进行编程,利用单片机定时器的捕获模块捕获超声波高电平持续的时间,再根据公式计算出距离值。
项目准备
1. 开发环境(PC、CCS软件)
2. MSP-EXP430F5529LP .
3. HC-sr04
4. 直尺或其他量度工具
实现原理
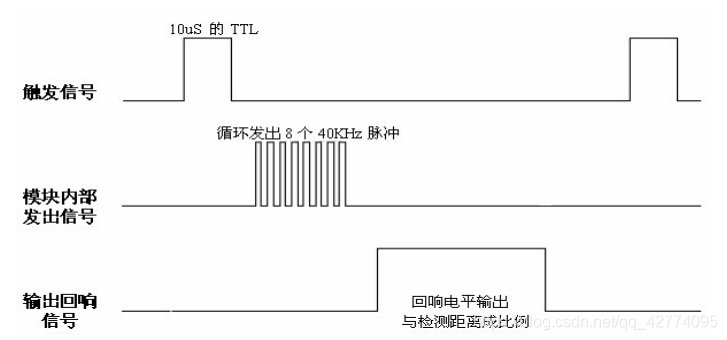
如图,只需要提供一个 10uS 以上脉冲触发信号,该模块内部将发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。 由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
本项目中通过单片机 IO 口P1.3输出10us的高电平给超声波模块 Trig触发测距,模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回; 有信号返回时 通过 IO 口P1.2 TA0.1捕获 Echo输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。通过单片机定时器的捕获模块捕获超声波高电平持续的时间,再根据公式计算出距离值。
距离公式:
距离 = ( 高电平时间 x 声速 (340M/s)) / 2
软件设计
UCS设置
单片机时钟模块默认使用的是内部DCOCLKDIV 1.048576MHZ,本项目中使用XT2外接的4MHz高频晶振,将系统配置为;
MCLK = SMCLK = XT2 = 4MHz
void UCS_Init(void)
{
// P1DIR |= BIT0; // ACLK set out to pins
// P1SEL |= BIT0;P2DIR |= BIT2; // SMCLK set out to pinsP2SEL |= BIT2;
// P7DIR |= BIT7; // MCLK set out to pins
// P7SEL |= BIT7;P5SEL |= BIT2+BIT3; // Port select XT2UCSCTL6 &= ~XT2OFF; // Enable XT2UCSCTL3 |= SELREF_2; // FLLref = REFO// Since LFXT1 is not used,// sourcing FLL with LFXT1 can cause// XT1OFFG flag to setUCSCTL4 |= SELA_2; // ACLK=REFO,SMCLK=DCO,MCLK=DCO// Loop until XT1,XT2 & DCO stabilizes - in this case loop until XT2 settlesdo{UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);// Clear XT2,XT1,DCO fault flagsSFRIFG1 &= ~OFIFG; // Clear fault flags}while (SFRIFG1&OFIFG); // Test oscillator fault flagUCSCTL6 &= ~XT2DRIVE0; // Decrease XT2 Drive according to// expected frequencyUCSCTL4 |= SELS_5 + SELM_5; // SMCLK=MCLK=XT2
}
USCI_UART设置
对于给定的BRCLK时钟源,使用的波特率决定了所需的分频因子N:
N = f BRCLK / Baudrate
因子N通常是非整数值,因此,使用至少一个除法器和一个调制器级来尽可能地满足该因子。 如果N等于或大于16,则可以通过设置UCOS16来选择过采样波特率生成模式。
在低频模式下,除数的整数部分由预分频器实现:
UCBRx = INT(N)
并且分数部分由调制器实现,具有以下标称公式:
UCBRSx =round [(N - INT(N))×8]
将UCBRSx设置递增或递减一个计数可以为任何给定位提供较低的最大位错误。 要确定是否是这种情况,必须为每个UCBRSx设置的每个位执行详细的错误计算。
在过采样模式下,预分频器设置为:
UCBRx = INT(N / 16)
并且第一级调制器设置为:
UCBRFx = round([(N / 16) - INT(N / 16)]×16)
当需要更高的精度时,UCBRSx调制器也可以使用0到7的值来实现。要找到给出任何给定位的最低最大误码率的设置,必须对UCBRSx的所有设置执行详细的误差计算。 初始UCBRFx设置为0到7,UCBRFx设置递增并递减1。
在本项目中将通过串口打印距离值到PC端,将串口配置为 115200 8N1
首先配置串口输入时钟,工作模式等,然后配置串口的波特率:
UCBR0 = 4000000 / 115200 = 34.722222222222222222222222222222 则:UCBR0 = 34
UCBRSx =(34.72 - 34)× 8 = 5.76 四舍五入后 UCBRS = 6
void Uart_Init(void) // 115200 8N1
{P4SEL |= BIT4+BIT5; // P4.4,5 = USA1 TXD/RXDUCA1CTL1 |= UCSWRST; // **Put state machine in reset**UCA1CTL1 |= UCSSEL__SMCLK ; // SMCLKUCA1BR0 = 34; // 4MHz 115200 (see User's Guide)// UCA1BR0 = 输入的时钟源/串口通信速率 (取整)UCA1BR1 = 0; // 4MHz 115200UCA1MCTL = UCBRS_6; // 输入的时钟源/串口通信速率的余数*8UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
// __bis_SR_register(GIE); // Enter LPM0, interrupts enabled
}
TIMER_A设置
本项目中需要用到定时器的捕获模式,通过TAxCTL设置输入时钟、工作模式、中断允许等(TA0CTL)。

本项目通过P1.2即TA0.1捕获超声波模块Echo引脚输出的高电平时长,配置TAxCCTLn设置工作模式、输入设置、中断允许等(TA0CCTL1)。

配置完定时器的寄存器以后,在中断程序中计算距离值。捕获原理很简单,通过捕获电平的变化,进而得到高电平持续持续时间,首先使用捕获模式的上升沿捕获,当捕获事件发生时会触发中断,在中断中记录TA0CCR1的值并将捕获模式设置为下降沿触发,然后计算距离值,也可在中断外部计算,中断中获取定时器值。
#define Trig1(a) if(a==1) P1OUT |= BIT3; else P1OUT &= ~BIT3unsigned int cap_new = 0; // 首次捕捉的ta0r值
unsigned int cap_old = 0; // 二次捕捉的ta0r值
//char test_num = 10; // 测量次数
char cap_N = 0; // 溢出次数
char state = 0x00; // zhuangtai
long cap_data = 0; // 距离值
//unsigned int dat[test_num]; //通过数组存10次测量值void Hc_sr_Init(void) // 超声波模块初始化
{/** P1.2 为echo引脚 捕获模式* P1.2 具有端口中断的通用数字I / O ,TA0 CCR1捕获:CCI1A输入,比较:Out1输出 BSL接收输入* P1.3 为Trig 数字i/o模式* P1.3 具有端口中断的通用数字I / O , TA0 CCR2捕获:CCI2A输入,比较:Out2输出*/P1OUT &= ~( BIT2 + BIT3 );P1DIR |= BIT3;P1SEL |= BIT2;/** note:由于选用的是P1.2 根据端口定义可知,使用的是TA0CCR1,捕获输入引脚通过TA0CCTL1寄存器控制,*-捕获值存储在TA0CCR1中。* TASSEL:SNCLK; 分频:4MHz/8 = 500k;计数模式:0 ==> 0xFFFF;* TA0CCTL1:上升沿捕获 ;同步捕捉;捕获模式;CCI1A输入;*/TA0CTL = TASSEL__SMCLK + ID__8 + MC_2 + TACLR + TAIE;TA0CCTL1 = CM_1 + SCS +CAP + CCIE + CCIS_0;
}void Hc_sr_Open(void) //生成一个持续10us的高电平
{Trig1(1);__delay_cycles(40);Trig1(0);
}#pragma vector=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{switch(__even_in_range(TA0IV,14)){case 0:break; // No interruptcase 2:state = TA0CCTL1 >> 14;TA0CCTL1 &= ~CCIFG;if( TA0CCTL1 & CM_1){cap_new = TA0CCR1;TA0CCTL1 &= ~CM_1;TA0CCTL1 |= CM_2;}else if ( TA0CCTL1 & CM_2){cap_old = TA0CCR1;cap_data = ( cap_old - cap_new ) * 0.34;UARTprintf("\n\ncap_data: %u mm",cap_data);TA0CCTL1 &= ~CM_2;TA0CCTL1 |= CM_1;}else UARTprintf("\nstate: %x",state); // 判断CM位捕捉模式
// UARTprintf("\n yes! ccr1 \nTA0 CCR1: %u TA0R: %u",TA0CCR1,TA0R);break; // CCR1 not usedcase 4: break; // CCR2 not usedcase 6: break; // reservedcase 8: break; // reservedcase 10: break; // reservedcase 12: break; // reservedcase 14:TA0CTL &= ~TAIFG;if(cap_old < cap_new ){cap_N += 1;}break; // overflowdefault: break;}
}主函数
主函数中对各个模块初始化,死循环执行超声波模块触发函数。
int main(void) {WDT_A_hold(WDT_A_BASE);UCS_Init();Uart_Init();Hc_sr_Init();__bis_SR_register(GIE);UARTprintf("\nInitialization is complete!");while(1){Hc_sr_Open();__delay_cycles(1000000);}
}
测试结果
由于室内空间有限,只测试了部分距离。为了方便观察数据,对数据进行了简单的换算。测试中发现,在距离较近时误差较大,引起误差的原因很多,例如程序算法、模块自身、温度等,本项目仅实现简单的超声波测距功能,如需高精度的测量可为其添加温度补偿功能,进一步提高测量精度。
| 测试距离(CM) | 实际距离(CM) |
|---|---|
| 4 | 4.3 |
| 8 | 8.2 |
| 10 | 10.1 |
| 20 | 20.1 |
| 30 | 30.1 |
| 190 | 191 |
总结
本项目实现了一个简单的超声波测距功能,其中最复杂的部分属于定时器模块的配置。在设计中通过串口输出温度值,可能对测试值产生误差。在项目期间遇到了只能测量10厘米以上的距离,经过测试后发现是算法原因,原因是声速值取错了,导致不能测量十厘米以下的距离。
附录
温度补偿
公式:

| 温度(℃) | -30 | -20 | -10 | 0 | 10 | 20 | 30 | 100 |
|---|---|---|---|---|---|---|---|---|
| 声速(M/S) | 313 | 319 | 325 | 332 | 338 | 344 | 349 | 386 |
第一次写,经验不足,如有不足或错误,敬请指教。
如需程序源码请私信或加QQ群:176242843
原创作品,转载请注明。
这篇关于基于MSP430F5529单片机实现HC-SR04超声波测距 CCS IAR的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




