本文主要是介绍第14期(六月)组队学习 Task2:LBP特征描述算子-人脸检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
LBP特征描述算子-人脸检测
- Task2:LBP特征描述算子-人脸检测
- 1 LBP特征描述算子简介
- 2 圆形LBP算子
- 3 LBP算子旋转不变性及等价模式
- 4 人脸检测流程
- 5参考代码
Task2:LBP特征描述算子-人脸检测
1 LBP特征描述算子简介
LBP(Local Binary Pattern)是一种用来描述图像局部特征的算子,具有灰度不变性和旋转不变性等优点。LBP可以用于人脸识别和目标检测,OpenCV中相关LBP特征进行人脸识别的接口,另外有LBP特征训练目标检测器的方法,虽然OpenCV实现了LBP特征的计算,但是没有提供一个单独的计算LBP特征的接口,即OpenCV中使用了LBP算法,却没有函数接口。
LBP特征用图像的局部邻域的联合分布 T T T来描述图像纹理特征,假设局部邻域中像素点个数为 P ( P > 1 ) P(P>1) P(P>1),则纹理特征的联合分布 T T T如下式所示。
T = t ( g c , g 0 , . . . , g p − 1 ) p = 1 , 2 , . . . , P T=t(g_c,g_0,...,g_p-1) \qquad p=1,2,...,P T=t(gc,g0,...,gp−1)p=1,2,...,P
其中 g c g_c gc表示相应局部邻域中心像素点灰度值, g p g_p gp表示以中心像素点为圆心,以 R R R为半径的圆内像素点灰度值。
假设中心像素点和局部邻域像素点相互独立,则纹理特征的联合分布 T T T如下式所示。
T = t ( g c , g 0 , . . . , g p − 1 ) p = 1 , 2 , . . . , P ≈ t ( g c ) t ( g 0 − g c , . . . , g p − 1 − g c ) T=t(g_c,g_0,...,g_p-1) \qquad p=1,2,...,P \\ \approx t(g_c)t(g_0-g_c,...,g_p-1-g_c) T=t(gc,g0,...,gp−1)p=1,2,...,P≈t(gc)t(g0−gc,...,gp−1−gc)
式中 t ( g c ) t(g_c) t(gc)决定局部邻域的整体亮度。处理纹理特征时可以忽略它,则
T ≈ t ( g 0 − g c , . . . , g p − 1 − g c ) p = 1 , 2 , . . . , P T \approx t(g_0-g_c,...,g_p-1-g_c) p=1,2,...,P T≈t(g0−gc,...,gp−1−gc)p=1,2,...,P
纹理特征为邻域像素点和中心像素点灰度差值的联合分布函数,由于 g p − 1 − g c g_p-1-g_c gp−1−gc 不受亮度均值影响,即统计量 T T T与灰度值无关。
特征函数如下式所示。
T ≈ t ( g 0 − g c , . . . , g p − 1 − g c ) p = 1 , 2 , . . . , P T \approx t(g_0-g_c,...,g_p-1-g_c) p=1,2,...,P T≈t(g0−gc,...,gp−1−gc)p=1,2,...,P
s ( x ) = { 1 , x ≤ 0 0 , x > 0 s(x)=\begin{cases} 1,\quad x\leq 0 \\\\ 0,\quad x>0 \end{cases} s(x)=⎩⎪⎨⎪⎧1,x≤00,x>0
LBP为二进制编码公式如下式所示
L B P P R = ∑ p = 0 P − 1 s ( g p − g c ) 2 p LBP_P^R=\sum_{p=0}^{P-1}s(g_p-g_c)2^p LBPPR=p=0∑P−1s(gp−gc)2p
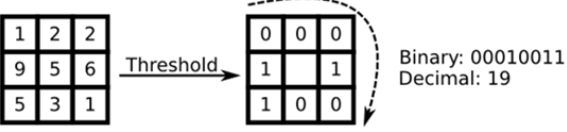
原始的LBP算子定义在一个 3 ∗ 3 3*3 3∗3邻域内,以邻域中心像素点灰度值为阈值,相邻的8个像素点的灰度值与邻域中心像素点灰度值进行比较,如果周围像素点灰度值大于中心像素点灰度值,周围像素点的位置就被标记为1,反之,标记为0.即邻域内8个像素点与中心像素点灰度值比较后得到一个8位二进制数,将8位二进制数依次排列形成一个二进制数字,该二进制数字就是中心像素点的LBP值,LBP值反映邻域中心像素点周围区域的纹理信息。
注意只有灰度图才能计算LBP特征,彩色图需要转换为灰度图。
2 圆形LBP算子
基本LBP算子最大缺陷是只能覆盖固定半径范围内想区域,不能满足不同尺寸和频率纹理的要求,为了适应不同尺度的纹理特征,并满足灰度级和旋转不变性要求,对LBP算子进行改进,将 3 ∗ 3 3*3 3∗3邻域扩展到任意邻域,使用圆形邻域代替了正方形邻域,改进后的LBP算子允许在半径为 R R R的圆形邻域内有任意多个像素点。 L B P P R LBP^R_P LBPPR表示半径为 R R R的圆形区域内含有 P P P个采样点的LBP算子。

对于给定中心点 ( x c , y c ) (x_c,y_c) (xc,yc),其邻域像素点位置为 ( x p , y p ) (x_p,y_p) (xp,yp)。 p ϵ P p\epsilon P pϵP,其采样点 ( x p , y p ) (x_p,y_p) (xp,yp)计算过程如下式。
x p = x c + R c o s ( 2 π p / P ) y p = y c + R s i n ( 2 π p / P ) x_p= x_c+Rcos({2\pi p/P}) \\ y_p= y_c+Rsin({2\pi p/P}) xp=xc+Rcos(2πp/P)yp=yc+Rsin(2πp/P)
其中 R R R为采样半径, p p p是第 p p p个采样点, P P P是采样数目,如果近邻点不在整数位置上,就需要进行插值运算。
3 LBP算子旋转不变性及等价模式
由于LBP算子具有灰度不变性,不具有旋转不变性,即同一幅图像,进行旋转以后,其特征会有很大的差别,影响匹配精度,对LBP算子进行改进得到具有旋转不变性的LBP特征。
改进方法是不断旋转圆形邻域得到一系列初始定义的LBP值,取最小值作为该邻域的值。


一个LBP算子可以产生不同的二进制模式,对于 L B P P R LBP^R_P LBPPR将会产生 2 p 2^p 2p种模式。如果邻域是 7 ∗ 7 7*7 7∗7,就有 2 36 2^{36} 236种模式。二进制模式太多是不利于信息的提取和识别。
实际图像中,大部分LBP模式最多只包含两次从1到0或从0到1的跳变。
等价模式是当某个局部二进制模式所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该局部二进制模式所对应的二进制就是一个等价模式,例如00000000,11111111,11100111是等价模式。
混合模式是除了等价模式之外的称为混合模式。
4 人脸检测流程
人脸检测过程采用多尺度滑窗搜索方式,每个尺度通过一定步长截取大小为 20 ∗ 20 20*20 20∗20的窗口,然后将窗口放到分类器中判断是不是人脸,如果是人脸,该窗口就通过所有分类器,否则该窗口会在某一级分类器被排除。

5参考代码
#coding:utf-8
import cv2 as cv
# 读取原始图像
img= cv.imread('test.jpg')
face_cascade=cv.CascadeClassifier('haarcascade_frontalface_default.xml')
face_cascade.load('D:/binchen/tkinter1/txzq1/Lib/site-packages/cv2/data/haarcascade_frontalface_default.xml')
# 检测⼈脸
# 灰度处理
gray = cv.cvtColor(img, code=cv.COLOR_BGR2GRAY)
# 检查⼈脸 按照1.1倍放到 周围最⼩像素为5
face_zone = face_cascade.detectMultiScale(gray, scaleFactor = 2, minNeighbors = 2) # maxSize =
(55,55)
print ('识别⼈脸的信息: \n',face_zone)
# 绘制矩形和圆形检测⼈脸
for x, y, w, h in face_zone:cv.rectangle(img, pt1 = (x, y), pt2 = (x+w, y+h), color = [0,0,255], thickness=2) ##绘制矩形⼈脸区域
# 绘制圆形⼈脸区域 radius表示半径
cv.circle(img, center = (x + w//2, y + h//2), radius = w//2, color = [0,255,0], thickness = 2)
# 设置图⽚可以⼿动调节⼤⼩
cv.namedWindow("result", 0)
# 显示图⽚
cv.imshow("result", img)
# 等待显示 设置任意键退出程序
cv.waitKey(0)
cv.destroyAllWindows()

这篇关于第14期(六月)组队学习 Task2:LBP特征描述算子-人脸检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









