特征描述专题

《数字图像处理-OpenCV/Python》第16章:图像的特征描述
《数字图像处理-OpenCV/Python》第16章:图像的特征描述 本书京东 优惠购书链接 https://item.jd.com/14098452.html 本书CSDN 独家连载专栏 https://blog.csdn.net/youcans/category_12418787.html 第16章:图像的特征描述 特征通常是针对图像中的目标或关键点而言的。目标的边界(

图像处理与视觉感知复习--图像特征描述图像生成
文章目录 角点(关键点)的特点图像分类的流程梯度方向直方图(HOG)流程平移、旋转和尺度特征(SIFT)流程常用的图像生成模型GAN的原理Diffusion Model的原理mAP计算方法 角点(关键点)的特点 紧致&高效:关键点数目比像素少很多显著性:关键点是独特的、有特色的局部特性:关键点占据图像的相对较小区域;对杂波和遮挡具有鲁棒性重复性/再现性:无论几何或光学变换,同一关

图像关键特征描述方法-小目标
图像关键特征描述方法主要包括以下几种: SIFT(尺度不变特征变换): SIFT是一种广泛使用的特征描述方法,它通过尺度空间和梯度方向直方图来描述图像中的关键点。SIFT特征描述具有尺度不变性和旋转不变性,对于光照和视角变化也具有一定的鲁棒性。 SURF(加速稳健特征): SURF是基于SIFT算法的改进版本,主要目的是加速计算速度和提高算法的稳健性。SURF特征描述利用图像的局部特征和梯度
opencv-Feature Description特征描述
接下来的opencv学习,主要使用VS2012+opencv2.4.5+WIN8来完成,相关例程的学习! /*** @file SURF_descriptor* @brief SURF detector + descritpor + BruteForce Matcher + drawing matches with OpenCV functions* @author A. Huaman

东京工业大学最新!一种具有多周期特征描述的精确ORB提取器
作者:小柠檬 | 来源:3DCV 在公众号「3DCV」后台,回复「原论文」可获取论文pdf 添加微信:dddvision,备注:3D高斯,拉你入群。文末附行业细分群 详细内容请关注3DCV 3D视觉精品课程:3dcver.com 3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D

论文阅读:“基于特征检测与深度特征描述的点云粗对齐算法”
文章目录 摘要简介相关工作粗对齐传统的粗对齐算法基于深度学习的粗对齐算法 特征检测及描述符构建 本文算法ISS 特征检测RANSAC 算法3DMatch 算法 实验结果参考文献 摘要 点云对齐是点云数据处理的重要步骤之一,粗对齐则是其中的难点。近年来,基于深度学习的点云对齐取得了较大进展,特别是 3DMatch 方法,能够在噪声、低分辨率以及数据缺失的条件下取得较好的对齐效果。3
BRINT: Binary Rotation Invariant and Noise Tolerant Texture Classification 特征描述子构建
本文是我读完论文“BRINT: Binary Rotation Invariant and Noise Tolerant Texture Classification”,进行个人理解与总结,致敬作者,不涉及官方理解,也并没有与论文作者进行沟通。如有侵权,联系删除~~~ 一、BRINT开发背景 简要来说,BRINT(Binary Rotation Invariant and Noise Tole
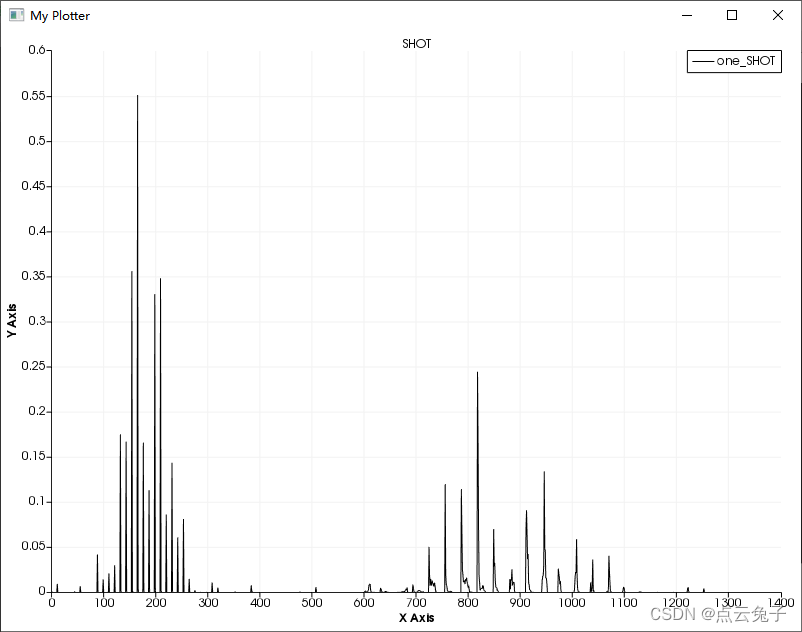
【三维点云数据处理】SHOT三维特征描述子
【三维点云数据处理】ISS3d+CSHOT+RANSAC+ICP 【三维点云数据处理】ISS特征点提取算法 目录 一、算法原理 参考文献 二、 代码实现 三、结果展示 一、算法原理 2014年 ,Tombari等 将点签名和点特征直方图的思想相结合,提出SHOT特征描述子。首先将点邻域空间分成几个子空间,然后对子空间中每个点的法向特征统计到直方图进行编 码,再

【Dlib人脸检测】1. HOG特征描述方法
【 1. Harr级联人脸检测、Dlib人脸检测器 】 OpenCV中的Harr级联人脸检测算是人脸识别中早期的检测方法,现在Dlib库在业内开始流行。因为很大程度上是其使用的HOG-SVM人脸检测比OpenCVHarr级联人脸检测效果更好。 当然,现在两个库中也都集成了基于深度学习方法的人脸检测算法。 OpenCV中Harr级联人脸检测优缺点 优点: 几乎可以在CPU上实时工作; 架构简

基于全局特征描述子的激光SLAM回环检测方法
作者:韩超,陈敏,黄宇昊,赵明辉,杜乾坤,梁庆华 来源:上海交通大学学报 编辑:东岸因为@一点人工一点智能 同步定位和建图(SLAM)是实现机器人在未知环境下的定位和移动的重要技术方法[1]。定位精度是井下巡检的核心指标,高精度的定位算法是巡检过程中导航和避障的基础。但井下环境复杂,具有低照度、弱纹理、图像特征难以识别的特点[2],给基于视觉的SLAM算法带来了极大的困难。而激光SLAM算法测量

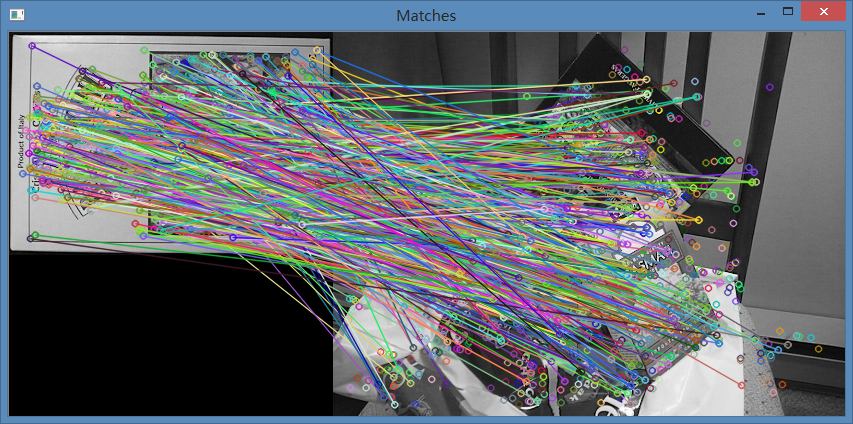
PCL点云处理之利用颜色RGB的SHOT特征描述方法 (二百一十七)
PCL点云处理之利用颜色RGB的SHOT特征描述方法 (二百一十七) 一、算法介绍二、算法实现1.代码 一、算法介绍 前文介绍了SHOT的特征描述方法计算。 这里加入颜色信息,更全面的SHOTRBG特征描述,下面是具体的计算方法,需要点云附带颜色信息,包含了法线计算步骤 二、算法实现 1.代码 代码如下(示例): #include <iostream>#includ

第14期(六月)组队学习 Task3:Haar特征描述算子-人脸检测
Task3:Haar特征描述算子-人脸检测 Haar特征描述算子-人脸检测1 Haar特征简介1.1 积分图1.1.1 积分图构建1.1.2 计算Haar特征值1.1.3 旋转矩形特征的计算1.1.4 AdaBoost分类器 2 参考代码2.1 静态图像的人脸检测2.2 动态图像的人脸检测 3 致谢 Haar特征描述算子-人脸检测 Haar特征是用于物体识别的一种数字图像特征

第14期(六月)组队学习 Task2:LBP特征描述算子-人脸检测
LBP特征描述算子-人脸检测 Task2:LBP特征描述算子-人脸检测1 LBP特征描述算子简介2 圆形LBP算子3 LBP算子旋转不变性及等价模式4 人脸检测流程5参考代码 Task2:LBP特征描述算子-人脸检测 1 LBP特征描述算子简介 LBP(Local Binary Pattern)是一种用来描述图像局部特征的算子,具有灰度不变性和旋转不变性等优点。LBP可以用

六月组队学习 Task2:LBP特征描述算子-人脸检测
1 LBP特征描述算子简介 LBP(Local Binary Pattern)是一种用来描述图像局部特征的算子,具有灰度不变性和旋转不变性等优点。LBP可以用于人脸识别和目标检测,OpenCV中相关LBP特征进行人脸识别的接口,另外有LBP特征训练目标检测器的方法,虽然OpenCV实现了LBP特征的计算,但是没有提供一个单独的计算LBP特征的接口,即OpenCV中使用了LBP算法,却没有函数接口

图像的典型特征描述子——LBP
以下文章摘录自: 《机器学习观止——核心原理与实践》 京东: https://item.jd.com/13166960.html 当当:http://product.dangdang.com/29218274.html (由于博客系统问题,部分公式、图片和格式有可能存在显示问题,请参阅原书了解详情) 1.1 图像的典型特征描述子 1.1.1 LBP LBP是Local