本文主要是介绍【AUTOSAR】VCU开发实际项目讲解(十八)----VCU 真空泵控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
-
- 真空泵控制
-
-
- 功能概述
-
监控当前制动用气压的大小,判断开启关闭真空泵的时机。
-
-
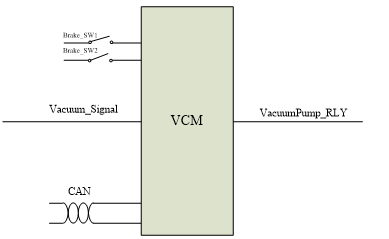
- 原理框图
-
-
-
- 信号列表
-
-
-
-
- 输入信号
-
-
| 序号 | 信号描述 | 输入/输出 | 类型 | 有效值 (接通时) | 湿电流 | 备注 |
| 1 | Brake_SW1 | Input | 数字信号 | 高有效 | 制动开关信号1 | |
| 2 | Brake_SW2 | Input | 数字信号 | 低有效 | 制动开关信号2 | |
| 3 | Vacuum_Signal | Input | 模拟信号 | 制动真空度信号 |
-
-
-
- 输出信号
-
-
| 序号 | 信号描述 | 输入/输出 | 类型 | 有效值 (接通时) | 湿电流 | 备注 |
| 1 | VacuumPump_RLY | Output | 数字信号 | 低有效 | 真空泵使能信号 |
-
-
-
- CAN信号
-
-
| 信号描述 | CAN ID | 位 (bit) | 类型 | 备注 |
| VCM_VacuumPumpSysFailure | Tx |
-
-
- 系统功能详述
- 真空泵控制功能:
- 系统功能详述
-
VCM在IGN ON状态下检测真空泵的压力:
- 真空系统无故障时如果检测到真空压力(相对于标准大气压力值,取正值)小于50KPa时,真空泵使能信号有效,控制真空泵继电器闭合,真空泵开启工作。
- 真空系统无故障时如果检测到真空压力(相对于标准大气压力值,取正值)大于70KPa时,真空泵使能信号无效,控制真空泵继电器断开,真空泵停止工作。
- 在真空泵使能信号有效且制动信号无效的情况下,如果持续>30s(TBD)真空泵压力小于50KPa,则判断为真空泵系统故障,控制真空泵继电器断开,真空泵停止工作。30S后恢复策略处理。
- 如果检测到真空泵系统故障,则通过CAN信号VCM_VacuumPumpSysFailure发送到IC指示。
这篇关于【AUTOSAR】VCU开发实际项目讲解(十八)----VCU 真空泵控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







