本文主要是介绍Netgear genie Nighthawk X6 r8000 + foscam camera,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Netgear genie Nighthawk X6 r8000
 ==>
==>
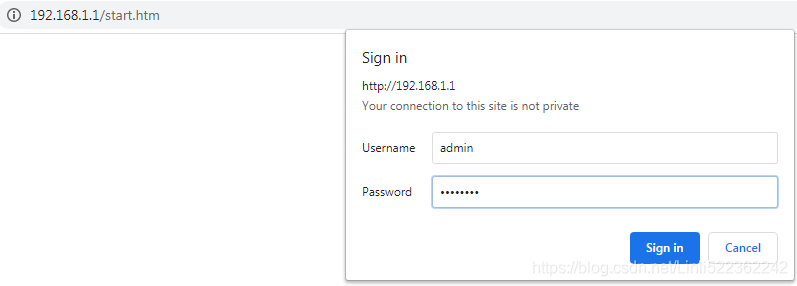
http://192.168.1.1/start.htm
ADVANCED ==> USB FUNCTION
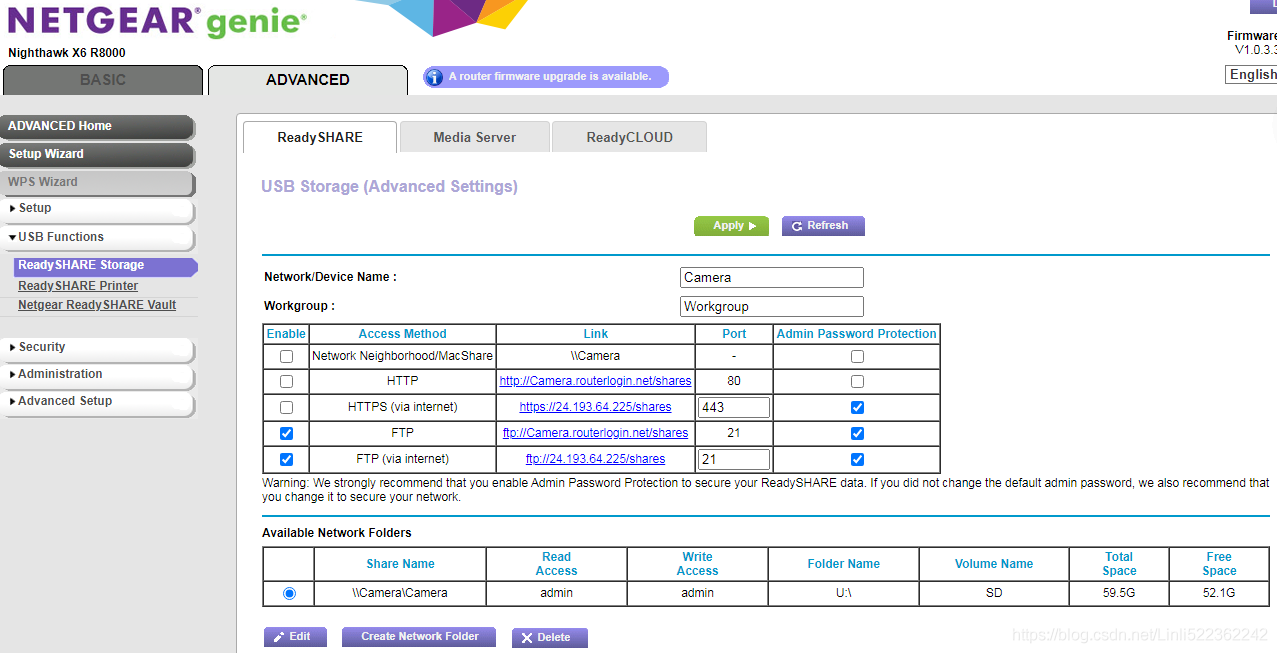
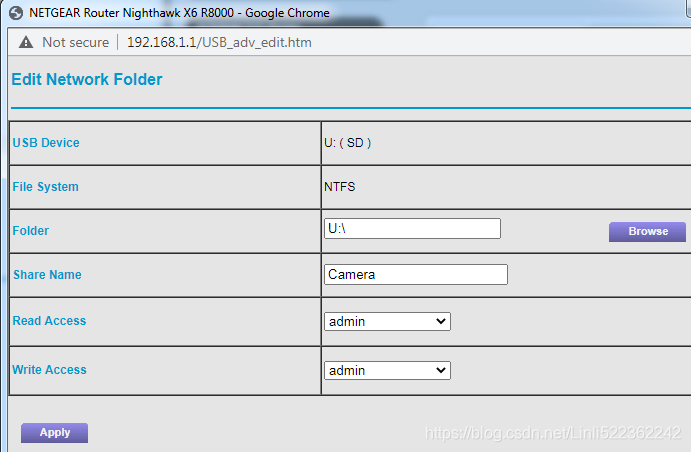
Apply
ftp://camera.routerlogin.net/shares/
foscam camera
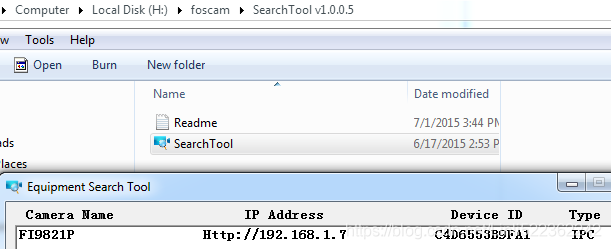
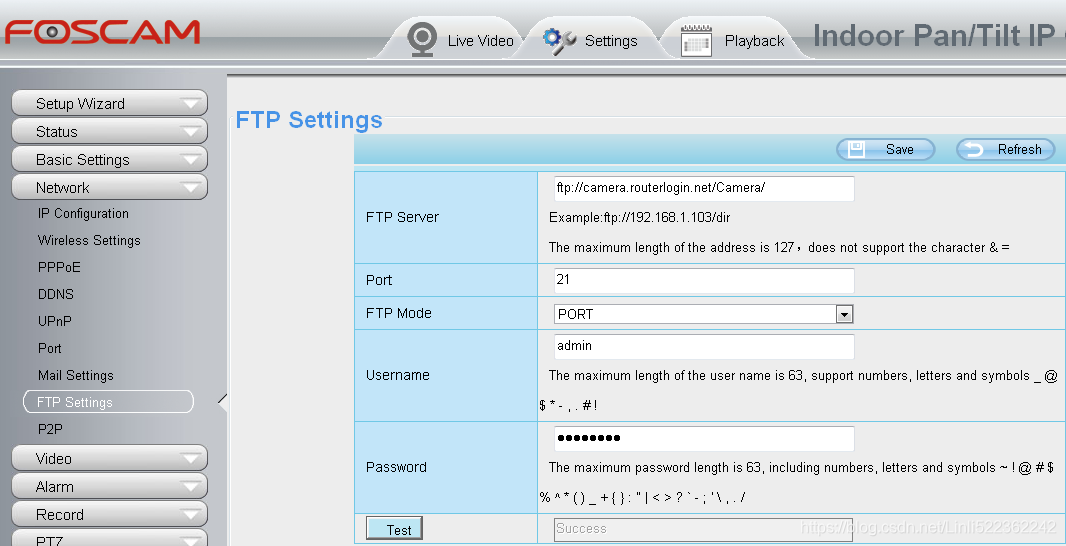
Test ==> Save
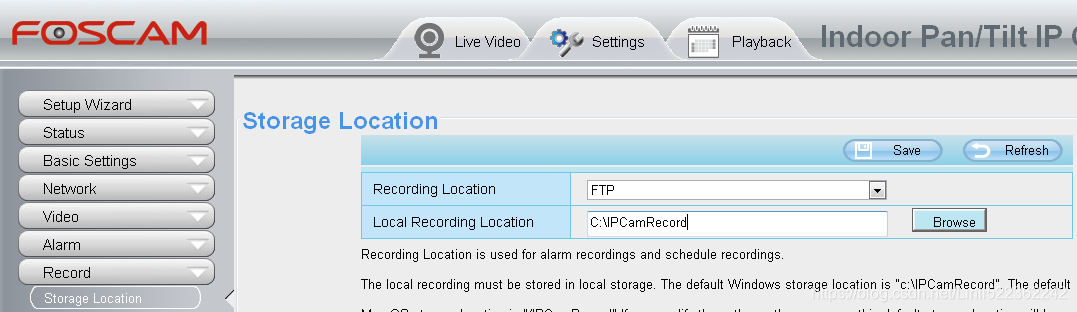
Choose FTP ==> C:\IPCamRecord ==> Save
这篇关于Netgear genie Nighthawk X6 r8000 + foscam camera的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!