本文主要是介绍多径信道理论的直观感受与MATLAB仿真(频率选择性衰落),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
多径信道理论模型
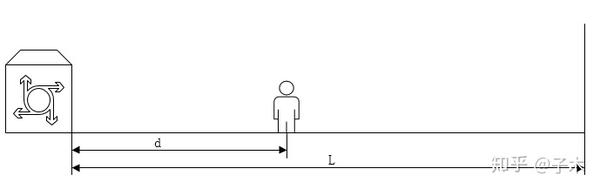
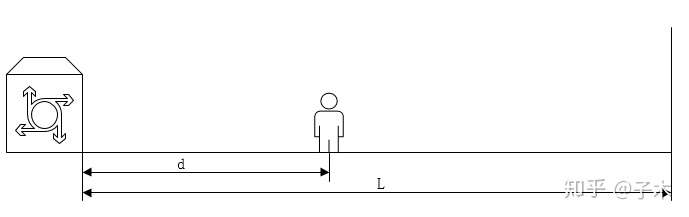
其中接收端离发射端距离为d,反射处离发送端距离为L。简化发送端发送的信号为正弦信号:
接收端接收到的信号有2路,一路是发射机直接到接收端,另一路经过发射机发射再反射到达接收端。考虑信号在传输过程中的损耗,电磁波损耗随着传输距离按平方规律衰减,相应的电场强度按1/d规律衰减。
在 t时刻接收到的信号为:
其中c为电磁波传播速度。
将其合并:
其中减号是因为反射部分信号反相。
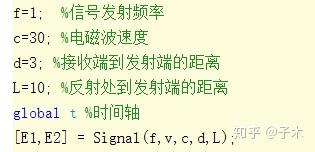
得到模型后进行分情况仿真,(为了使图更直观,将此处电磁波传播速度改为30,不会影响结果)。
多径信道下的衰落仿真(频率选择性衰落)
1.1 衰落的产生:
(1)接收端静止时,当接收端到发射端的距离<接收端到反射处的距离
(2)接收端静止时,当接收端到发射端的距离>接收端到反射处的距离
可知衰落与接收端到发射端和反射端的距离有关。
1.2 频率的选择性衰落:
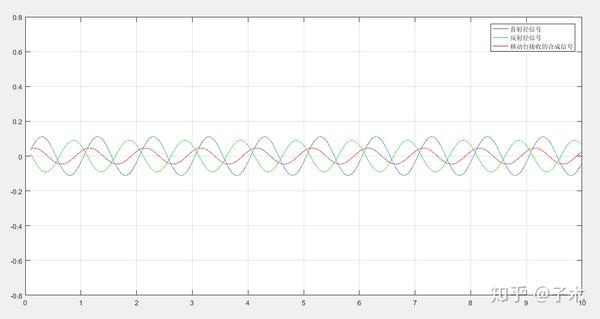
(1)接收端静止,且接收端到发射端的距离<接收端到反射端的距离,发射频率f=1
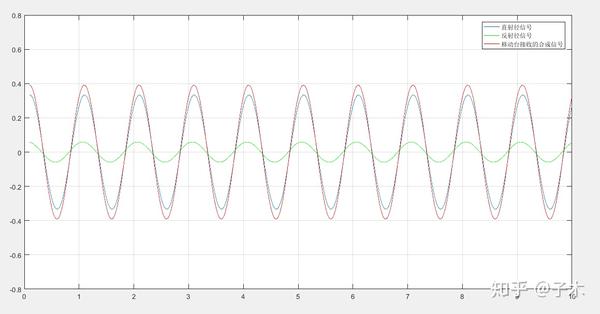
(2)接收端静止,且接收端到发射端的距离<接收端到反射端的距离,发射频率f=4时
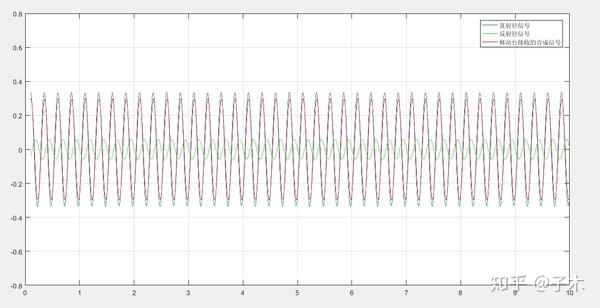
此处从仿真层面上感受到了频率的选择性衰落。即在同一个位置,由于反射径的存在,发射端发射不同频率的信号时,某些频率信号被增强,而有的频率信号被削弱。
1.3 matlab仿真代码:
clc;
clear all;
close all;
%% 参数初始化
f=1; %信号发射频率
v=0; %接收端速度,静止情况为0
c=10; %电磁波速度
d=12; %接收端到发射端的距离
L=15; %反射处到发射端的距离
t=0.1:0.001:12; %时间轴
% [E1,E2,E3] = Signal(f,v,c,d,L);%% 计算波形
E1=cos(2*pi*f*(t-d/c))/d;
E2=cos(2*pi*f*(t-(2*L-d)/c))/(2*L-d);%% 绘图
figure
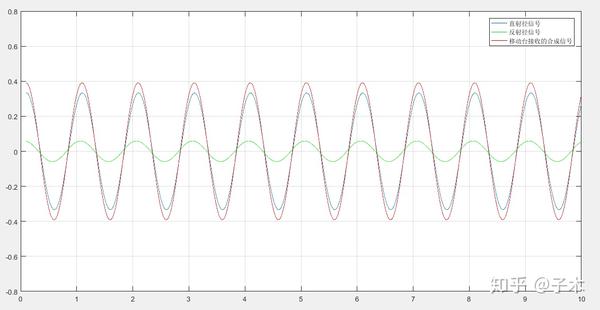
plot(t,E1); %画出直射径的信号
hold on
plot(t,-E2,'g'); %画出反射径的信号
hold on
plot(t,E1-E2,'r'); %画出接收端总的接收信号。
legend('直射径信号 ','反射径信号 ','合成信号 '); %在坐标轴上添加图例
axis([0 12 -0.3 0.3]);
grid onfigure
plot(t,E1-E2,'r') %画出接收端总的接收信号。
legend('合成信号 ')
axis([0 12 -0.3 0.3]);
grid on这篇关于多径信道理论的直观感受与MATLAB仿真(频率选择性衰落)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







