本文主要是介绍基于虚拟阻抗的下垂控制——孤岛双机并联Simulink仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
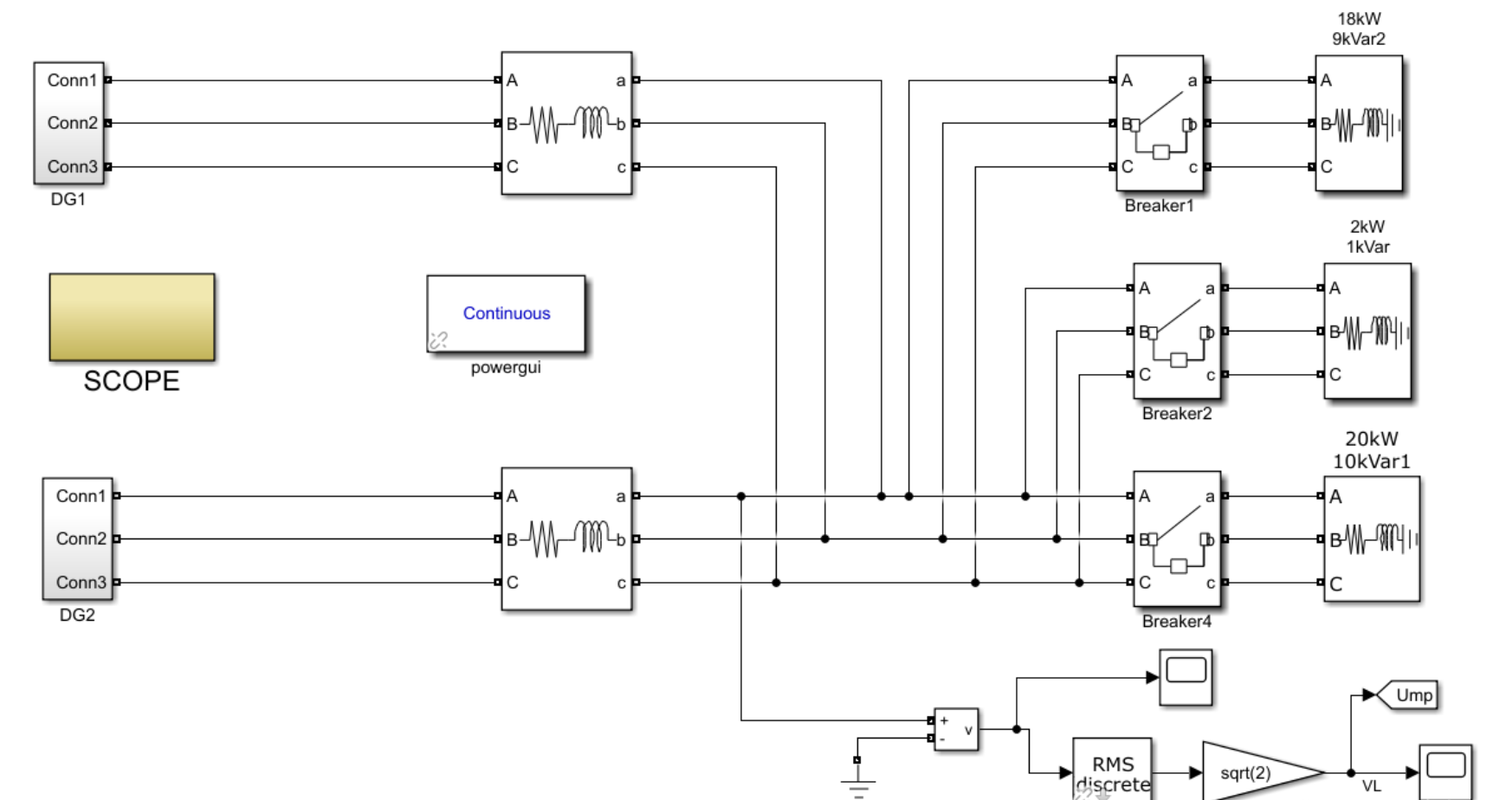
2.1 整体模型
2.2 虚拟阻抗环
2.3 有功功率波形图
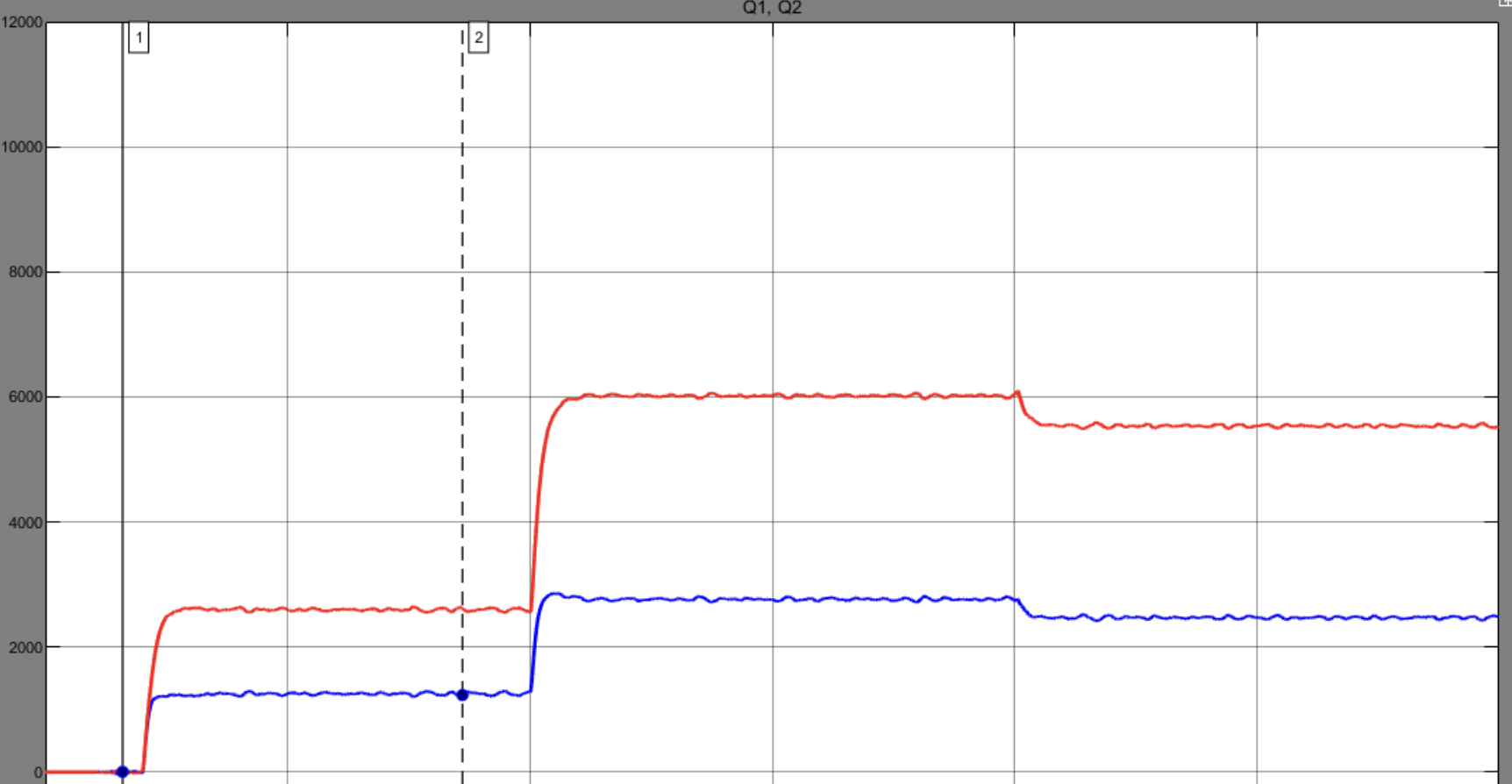
2.4 无功功率波形图
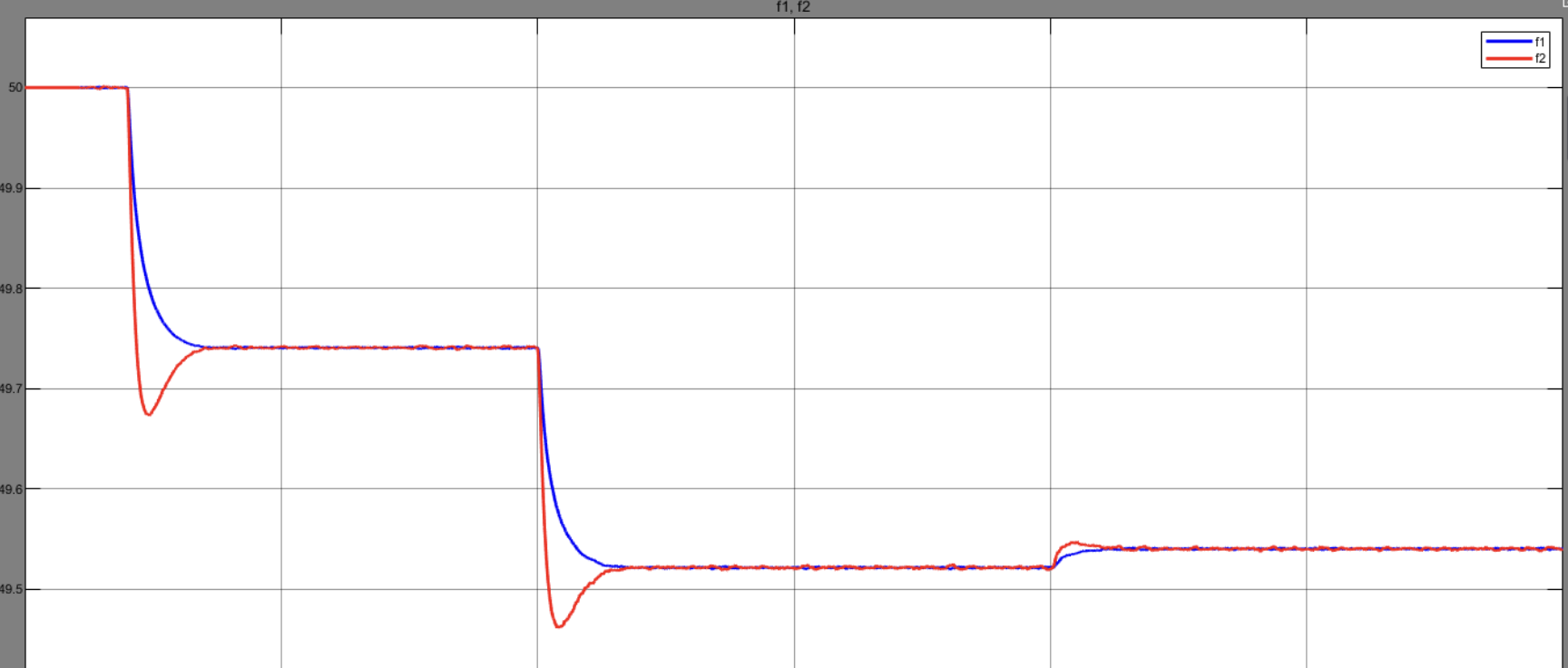
2.5 频率曲线
🎉3 参考文献
🌈4 Simulink仿真实现

💥1 概述
基于虚拟阻抗的下垂控制是一种先进的技术,在孤岛双机并联Simulink仿真中扮演着重要的角色。这个系统包含了多个关键模块,包括锁相环、功率计算模块、下垂控制模块、电压电流双环控制模块以及虚拟阻抗反馈环。
首先,锁相环模块在系统中起到了关键的作用。它通过对电网电压和发电机电压进行相位比较,实现了电网和发电机的同步。这种同步对于确保系统的稳定性和可靠性至关重要。
其次,功率计算模块在系统中扮演着重要的角色。它负责计算发电机的输出功率,并将其与电网功率进行比较,以实现功率的平衡。通过精确计算和比较功率,系统能够实现有效的能量转换和分配。
而下垂控制模块则是整个系统的核心。它通过对发电机转速进行控制,实现对发电机输出功率的调节。通过下垂控制,系统能够在不同负载条件下实现稳定的电网供电,同时保持发电机的运行在最佳状态。
此外,电压电流双环控制模块在系统中起到了重要的作用。它通过监测和调节发电机的电压和电流,确保系统的稳定性和可靠性。这种双环控制能够在电网电压波动或负载变化时及时作出调整,保证系统的正常运行。
最后,虚拟阻抗反馈环是系统中的一个关键环节。它通过模拟传统的电力系统中的阻抗特性,实现对系统的动态响应和稳定性的控制。通过虚拟阻抗反馈环,系统能够更好地适应不同的工作条件和负载变化,提高系统的可靠性和鲁棒性。
综上所述,基于虚拟阻抗的下垂控制在孤岛双机并联Simulink仿真中具有重要的应用价值。通过锁相环、功率计算模块、下垂控制模块、电压电流双环控制模块和虚拟阻抗反馈环的协同作用,系统能够实现稳定可靠的电网供电,并在不同工况下保持发电机的最佳运行状态。这种技术的应用将为电力系统的发展和优化提供有力支持。
📚2 运行结果
2.1 整体模型
2.2 虚拟阻抗环

2.3 有功功率波形图

2.4 无功功率波形图
2.5 频率曲线
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]施家博苗虹曾成碧.基于复合型虚拟阻抗与自适应下垂控制的并联逆变器功率均分策略[J].电测与仪表, 2022, 59(12):77-82.
[2]何瑞.基于虚拟阻抗的并网变流器并联控制策略的研究[D].西安理工大学[2023-10-05].
[3]刘滔,官弼刚,梁亦峰.基于虚拟阻抗的孤岛微网并联逆变器间环流抑制策略[J].智能计算机与应用, 2020(1):5.
[4]李新,于佳文,韩顺杰,et al.基于虚拟阻抗的微网改进下垂控制[J]. 2019.DOI:CNKI:SUN:JLGX.0.2020-01-011.
🌈4 Simulink仿真实现
这篇关于基于虚拟阻抗的下垂控制——孤岛双机并联Simulink仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




