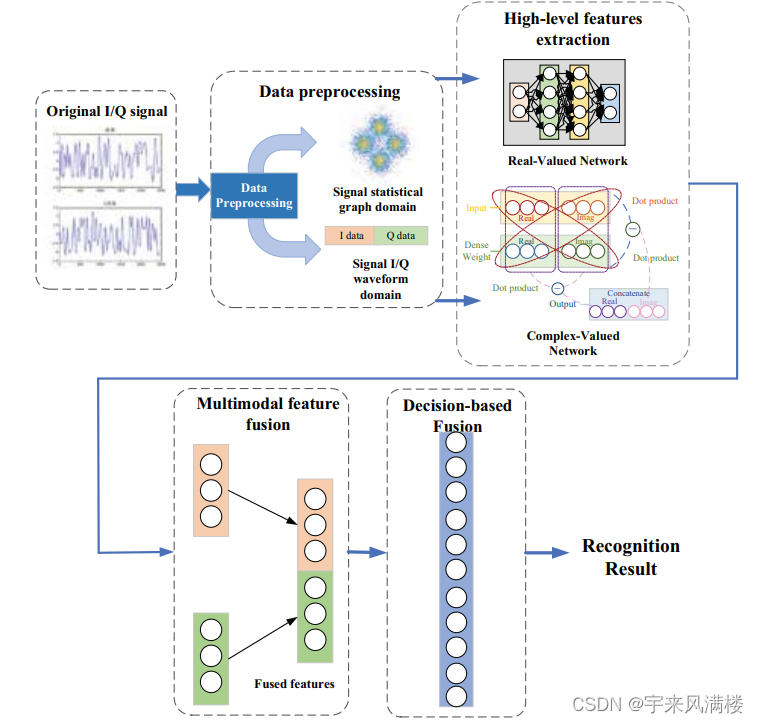
Interference Signal Recognition Based on Multi-Modal Deep Learning
2023-10-06 00:26
原文地址:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.chinasem.cn/article/152381。
如若内容造成侵权/违法违规/事实不符,请联系我们进行投诉反馈,一经查实,立即删除!我们的邮箱:23002807@qq.com
相关文章

一文详解Java Condition的await和signal等待通知机制
《一文详解JavaCondition的await和signal等待通知机制》这篇文章主要为大家详细介绍了JavaCondition的await和signal等待通知机制的相关知识,文中的示例代码讲... 目录1. Condition的核心方法2. 使用场景与优势3. 使用流程与规范基本模板生产者-消费者示例
mysqld_multi在Linux服务器上运行多个MySQL实例
《mysqld_multi在Linux服务器上运行多个MySQL实例》在Linux系统上使用mysqld_multi来启动和管理多个MySQL实例是一种常见的做法,这种方式允许你在同一台机器上运行多个... 目录1. 安装mysql2. 配置文件示例配置文件3. 创建数据目录4. 启动和管理实例启动所有实例

vue解决子组件样式覆盖问题scoped deep
《vue解决子组件样式覆盖问题scopeddeep》文章主要介绍了在Vue项目中处理全局样式和局部样式的方法,包括使用scoped属性和深度选择器(/deep/)来覆盖子组件的样式,作者建议所有组件... 目录前言scoped分析deep分析使用总结所有组件必须加scoped父组件覆盖子组件使用deep前言

Retrieval-based-Voice-Conversion-WebUI模型构建指南
一、模型介绍 Retrieval-based-Voice-Conversion-WebUI(简称 RVC)模型是一个基于 VITS(Variational Inference with adversarial learning for end-to-end Text-to-Speech)的简单易用的语音转换框架。 具有以下特点 简单易用:RVC 模型通过简单易用的网页界面,使得用户无需深入了

2014 Multi-University Training Contest 8小记
1002 计算几何 最大的速度才可能拥有无限的面积。 最大的速度的点 求凸包, 凸包上的点( 注意不是端点 ) 才拥有无限的面积 注意 : 凸包上如果有重点则不满足。 另外最大的速度为0也不行的。 int cmp(double x){if(fabs(x) < 1e-8) return 0 ;if(x > 0) return 1 ;return -1 ;}struct poin
2014 Multi-University Training Contest 7小记
1003 数学 , 先暴力再解方程。 在b进制下是个2 , 3 位数的 大概是10000进制以上 。这部分解方程 2-10000 直接暴力 typedef long long LL ;LL n ;int ok(int b){LL m = n ;int c ;while(m){c = m % b ;if(c == 3 || c == 4 || c == 5 ||
2014 Multi-University Training Contest 6小记
1003 贪心 对于111...10....000 这样的序列, a 为1的个数,b为0的个数,易得当 x= a / (a + b) 时 f最小。 讲串分成若干段 1..10..0 , 1..10..0 , 要满足x非递减 。 对于 xi > xi+1 这样的合并 即可。 const int maxn = 100008 ;struct Node{int

简单的Q-learning|小明的一维世界(3)
简单的Q-learning|小明的一维世界(1) 简单的Q-learning|小明的一维世界(2) 一维的加速度世界 这个世界,小明只能控制自己的加速度,并且只能对加速度进行如下三种操作:增加1、减少1、或者不变。所以行动空间为: { u 1 = − 1 , u 2 = 0 , u 3 = 1 } \{u_1=-1, u_2=0, u_3=1\} {u1=−1,u2=0,u3=1}

简单的Q-learning|小明的一维世界(2)
上篇介绍了小明的一维世界模型 、Q-learning的状态空间、行动空间、奖励函数、Q-table、Q table更新公式、以及从Q值导出策略的公式等。最后给出最简单的一维位置世界的Q-learning例子,从给出其状态空间、行动空间、以及稠密与稀疏两种奖励函数的设置方式。下面将继续深入,GO! 一维的速度世界 这个世界,小明只能控制自己的速度,并且只能对速度进行如下三种操作:增加1、减

2024年 Biomedical Signal Processing and Control 期刊投稿经验最新分享
期刊介绍 《Biomedical Signal Processing and Control 》期刊旨在为临床医学和生物科学中信号和图像的测量和分析研究提供一个跨学科的国际论坛。重点放在处理在临床诊断,患者监测和管理中使用的方法和设备的实际,应用为主导的研究的贡献。 生物医学信号处理和控制反映了这些方法在工程和临床科学的界面上被使用和发展的主要领域。期刊的范围包括相关的评论论文(review p