本文主要是介绍什么叫3d建模渲染?与云渲染农场关系,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
3D建模渲染行业是一个涉及多个行业和领域的技术过程,它不仅仅是一个特点行业的产物,而是广泛应用于产品设计、工业设计、环境设计、动画、游戏建模和影视CG等多个领域。那么3D建模渲染又与云渲染农场有什么关系呢,一起来简单看看吧。
什么叫3d建模渲染?
这个过程可以分为两个主要阶段:建模和渲染。
3D建模:是创建三维对象或场景的过程。这可以是设计一个新的产品的外观和结构,也可以是构建一个虚拟环境或角色。在3D建模中,艺术家或设计师使用专业的软件工具来塑造、调整和细化模型的形状和细节。
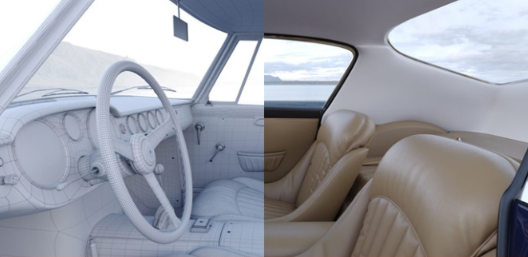
渲染:则是将这些三维模型转换成二维图像的过程,这些图像可以是静态的,也可以是动画序列。渲染过程中,会为模型赋予材质、颜色和纹理,同时模拟光照和阴影效果,以创造出逼真的视觉输出。这个过程相当于给模型“化妆”,使其看起来更加真实和立体。

在渲染过程中,还有一个重要的步骤是拆UV。UV映射是将三维模型的表面展开成二维平面的过程,这样艺术家就可以在这个平面上绘制纹理。这个过程对于创建复杂的纹理和细节至关重要,因为它允许艺术家在二维空间中精确地控制纹理的每个部分。
渲染器:是用于执行渲染过程的软件工具,如V-Ray、Arnold、Octane Render、Redshift。这些渲染器利用先进的算法来计算光照、阴影、反射和折射等效果,从而生成高质量的图像。

与云渲染农场关系呢?
最主要的关系:加速3D渲染
由于3D渲染可能是一个耗时的过程,特别是对于需要大量计算资源的高分辨率和复杂场景,云渲染农场可以显著加快渲染速度。用户可以同时在多个服务器上渲染多个帧或场景,而不必等待一个接一个地完成。云服务提供商通常会提供数据备份和安全措施,确保用户的数据安全和可靠。

一些云渲染服务提供商为新用户提供了体验机会,例如Renderbus瑞云渲染农场,新用户在注册动画账号时输入特定代码【GSZI】可以获得10 元渲染券。此外,首次充1元的用户,还可能获得额外100元的无门槛渲染券作为奖励。

这篇关于什么叫3d建模渲染?与云渲染农场关系的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






