本文主要是介绍【小白深度学习入门】【2】池化层详解:工作原理、维度计算、池化类型,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
👍感谢小伙伴们点赞、关注!
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 23.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 24.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 26.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 28.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 30.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
| 31.【基于YOLOv8深度学习的100种中草药智能识别系统】 | 32.【基于YOLOv8深度学习的102种花卉智能识别系统】 |
| 33.【基于YOLOv8深度学习的100种蝴蝶智能识别系统】 | 34.【基于YOLOv8深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于YOLOv8深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于YOLOv8深度学习的复杂场景下船舶目标检测系统】 | 38.【基于YOLOv8深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于YOLOv8深度学习的智能道路裂缝检测与分析系统】 | 40.【基于YOLOv8深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于YOLOv8深度学习的遥感地理空间物体检测系统】 | 42.【基于YOLOv8深度学习的无人机视角地面物体检测系统】 |
| 43.【基于YOLOv8深度学习的木薯病害智能诊断与防治系统】 | 44.【基于YOLOv8深度学习的野外火焰烟雾检测系统】 |
| 45.【基于YOLOv8深度学习的脑肿瘤智能检测系统】 | 46.【基于YOLOv8深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于YOLOv8深度学习的橙子病害智能诊断与防治系统】 | 48.【车辆检测追踪与流量计数系统】 |
| 49.【行人检测追踪与双向流量计数系统】 | 50.【基于YOLOv8深度学习的反光衣检测与预警系统】 |
| 51.【危险区域人员闯入检测与报警系统】 | 52.【高密度人脸智能检测与统计系统】 |
| 53.【CT扫描图像肾结石智能检测系统】 | 54.【水果智能检测系统】 |
| 55.【水果质量好坏智能检测系统】 | 56.【蔬菜目标检测与识别系统】 |
| 57.【非机动车驾驶员头盔检测系统】 | 58.【太阳能电池板检测与分析系统】 |
| 59.【工业螺栓螺母检测】 | 60.【金属焊缝缺陷检测系统】 |
| 61.【链条缺陷检测与识别系统】 | 62.【交通信号灯检测识别】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
- 引言
- 池化后维度计算
- 1.为什么要使用池化层?
- 2.池化层的类型:
- 2.1**最大池化**
- 2.2**平均池化**
- 2.3**全局池化**
- 池化层的优缺点
引言
在卷积神经网络 (CNN) 中,池化层是一种常见的层类型,通常添加在卷积层之后。池化层用于减少特征图的空间维度(即宽度和高度),同时保留深度(即通道数)。
- 池化层的工作原理是将输入特征图划分为一组不重叠的区域,称为
池化区域。然后,每个池化区域被转换为单个输出值,该输出值表示该区域中特定特征的存在。最常见的池化操作类型是最大池化和平均池化。 - 在最大池化中,每个池化区域的输出值只是该区域内输入值的最大值。这样做的效果是保留每个池化区域中最显著的特征,同时丢弃不太相关的信息。最大池化通常用于 CNN 中的物体识别任务,因为它有助于识别物体最显著的特征,例如其边缘和角落。
- 在平均池化中,每个池化区域的输出值是该区域内输入值的平均值。与最大池化相比,这样做可以保留更多信息,但也可能削弱最显著的特征。平均池化通常用于 CNN 中的图像分割和物体检测等任务,这些任务需要对输入进行更细粒度的表示。
在 CNN 中,池化层通常与卷积层结合使用,每个池化层都会减少特征图的空间维度,而卷积层则会从输入中提取越来越复杂的特征。然后将生成的特征图传递到全连接层,该层执行最终的分类或回归任务。
池化后维度计算
池化操作涉及在特征图的每个通道上滑动二维过滤器,并汇总过滤器覆盖区域内的特征。 对于具有nh X nw X nc 维度的特征图,池化层后获得的输出维度为 :
(nh - f + 1)/s X (nw - f + 1)/s X nc
各参数含义为:
-> nh -特征图的高度
-> nw -特征图的宽度
-> nc -特征图中的通道数
-> f -卷积核的大小
-> s -步幅长度
一种常见的 CNN 模型架构是将多个卷积层和池化层一个接一个地堆叠在一起。
1.为什么要使用池化层?
- 池化层用于减少特征图的维度。因此,它减少了需要学习的参数数量和网络中执行的计算量。
- 池化层总结了卷积层生成的特征图区域中存在的特征。因此,进一步的操作是对总结的特征而不是卷积层生成的精确定位的特征执行的。这使得模型对输入图像中特征位置的变化更具鲁棒性。
2.池化层的类型:
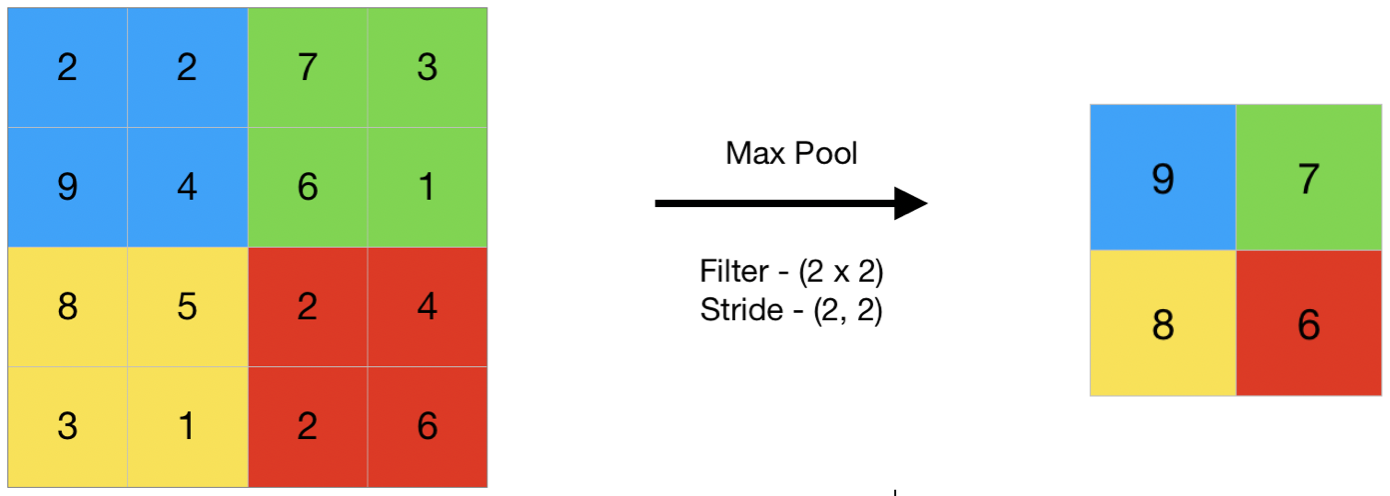
2.1最大池化
- 最大池化是一种池化操作,它从过滤器覆盖的特征图区域中选择最大元素。因此,最大池化层之后的输出将是包含前一个特征图最突出特征的特征图。
- 这可以使用 keras 中的 MaxPooling2D 层实现,如下所示:
代码#1:使用 keras 执行最大池化
import numpy as np
from keras.models import Sequential
from keras.layers import MaxPooling2D# define input image
image = np.array([[2, 2, 7, 3],[9, 4, 6, 1],[8, 5, 2, 4],[3, 1, 2, 6]])
image = image.reshape(1, 4, 4, 1)# define model containing just a single max pooling layer
model = Sequential([MaxPooling2D(pool_size = 2, strides = 2)])# generate pooled output
output = model.predict(image)# print output image
output = np.squeeze(output)
print(output)- 输出:
[[9. 7.]
[8. 6.]]
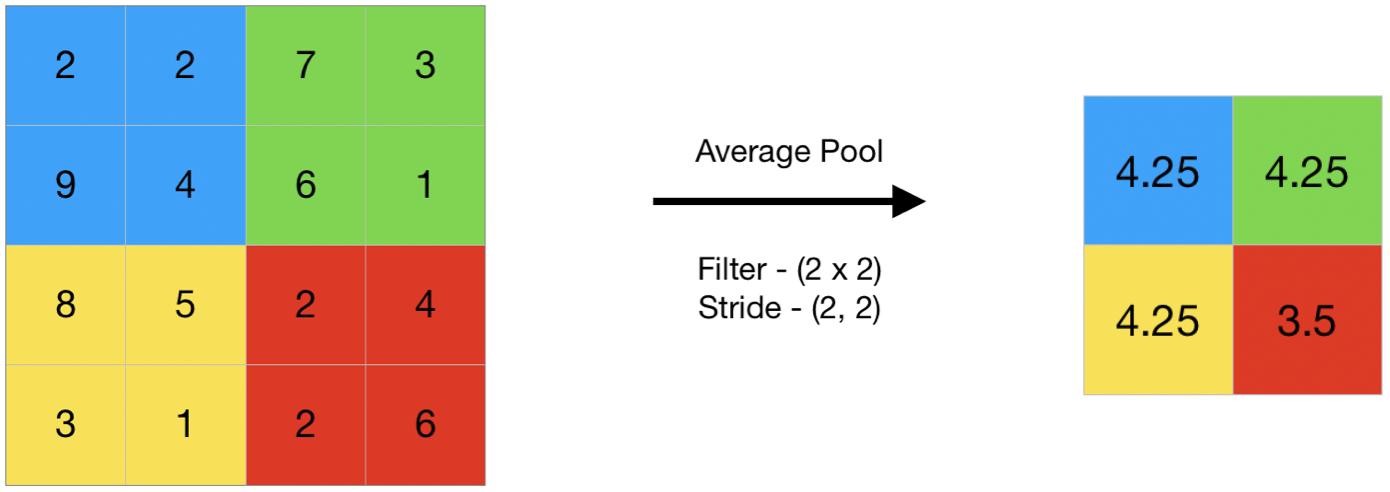
2.2平均池化
- 平均池化计算过滤器覆盖的特征图区域中元素的平均值。因此,最大池化给出了特征图特定块中最突出的特征,而平均池化给出了块中存在的特征的平均值。
- 代码 #2:使用 keras 执行平均池化
import numpy as np
from keras.models import Sequential
from keras.layers import AveragePooling2D# define input image
image = np.array([[2, 2, 7, 3],[9, 4, 6, 1],[8, 5, 2, 4],[3, 1, 2, 6]])
image = image.reshape(1, 4, 4, 1)# define model containing just a single average pooling layer
model = Sequential([AveragePooling2D(pool_size = 2, strides = 2)])# generate pooled output
output = model.predict(image)# print output image
output = np.squeeze(output)
print(output)输出:
[[4.25 4.25]
[4.25 3.5]]
2.3全局池化
全局池化将特征图中的每个通道缩减为单个值。因此,nh x nw x nc特征图缩减为1 x 1 x nc特征图。这相当于使用尺寸为nh x nw的过滤器,即特征图的尺寸。
此外,它可以是全局最大池化或全局平均池化。
代码 #3:使用 keras 执行全局池化
import numpy as np
from keras.models import Sequential
from keras.layers import GlobalMaxPooling2D
from keras.layers import GlobalAveragePooling2D# define input image
image = np.array([[2, 2, 7, 3],[9, 4, 6, 1],[8, 5, 2, 4],[3, 1, 2, 6]])
image = image.reshape(1, 4, 4, 1)# define gm_model containing just a single global-max pooling layer
gm_model = Sequential([GlobalMaxPooling2D()])# define ga_model containing just a single global-average pooling layer
ga_model = Sequential([GlobalAveragePooling2D()])# generate pooled output
gm_output = gm_model.predict(image)
ga_output = ga_model.predict(image)# print output image
gm_output = np.squeeze(gm_output)
ga_output = np.squeeze(ga_output)
print("gm_output: ", gm_output)
print("ga_output: ", ga_output)输出:
gm_输出:9.0
ga_输出:4.0625
池化层的优缺点
池化层的优点:
- 降维:池化层的主要优点是它们有助于降低特征图的空间维度。这降低了计算成本,并通过减少模型中的参数数量来帮助避免过度拟合。
- 平移不变性:池化层对于实现特征图中的平移不变性也很有用。这意味着图像中物体的位置不会影响分类结果,因为无论物体的位置如何,都会检测到相同的特征。
- 特征选择:池化层也可以帮助从输入中选择最重要的特征,因为最大池化选择最显著的特征,而平均池化保留更多的信息。
池化层的缺点:
- 信息丢失:池化层的主要缺点之一是它们会从输入特征图中丢弃一些信息,这对于最终的分类或回归任务非常重要。
- 过度平滑:池化层也可能导致特征图的过度平滑,从而导致丢失一些对于最终分类或回归任务很重要的细粒度细节。
- 超参数调整:池化层还引入了超参数,例如池化区域的大小和步长,需要对其进行调整才能实现最佳性能。这可能很耗时,并且需要一定的模型构建专业知识。
关注文末名片G-Z-H:【阿旭算法与机器学习】,发送【开源】可获取更多学习资源
好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
这篇关于【小白深度学习入门】【2】池化层详解:工作原理、维度计算、池化类型的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






