本文主要是介绍Adaloss: 用于关键点定位的自适应损失函数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶”
作者:Jae Duk Seo
编译:ronghuaiyang
导读
逐步的增加训练的难度,让模型越来越准确。
这里给大家介绍关键点定位的另一个损失函数,但现在我们使用的是热图,我们使用2D概率图。(但这种损失有点特殊,因为它会自适应ground truth数据,并进行梯度控制)。
因此,某些损失的值会更集中,如中小损失。
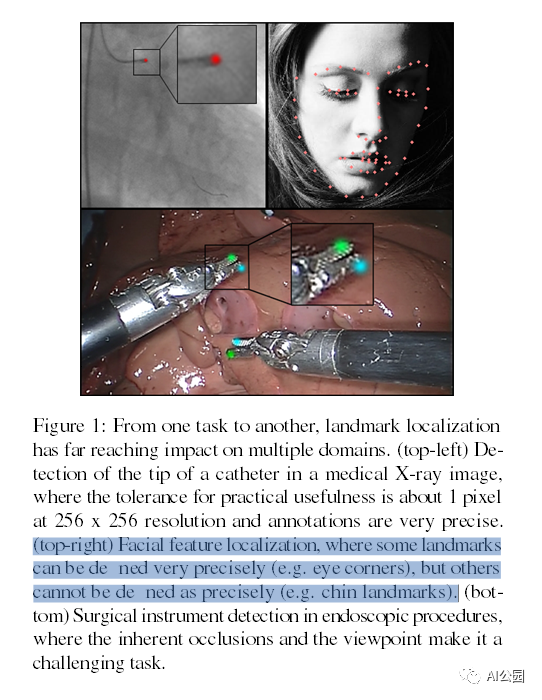
对于任何与计算机视觉相关的任务,如果我们需要检测关键点的话,通常准确的预测这些关键点是很难的。
这个方法能给出令人印象深刻的结果,非常的准确。大多数现有的深度学习方法都是输出坐标或热图。

首先,对二维高斯分布进行展开,但随着训练的进行,它会变得更加精确,这很好,因为网络正在处理一个更困难的问题。首先,我们将使用较大的方差,因此训练可以更容易地进行,然而,随着训练的进行,我们将变得更精确。
本文的特别之处在于,他们创建了一个基于自适应损失函数的应用,这是非常有趣的。模型需要更少的迭代就能收敛了,这是很好的优点。
他们在不同的应用上尝试了他们的方法,希望能够向所有人展示令人印象深刻的结果。热力图更好?在添加了跳跃连接和FCN之后似乎是这样的。有些工作是与视频相关的,有些工作甚至是使用GANs创建一个新的数据集,这是一项艰巨的任务。

他们使用的是热力图的回归方法,他们的损失函数是专门创建的,在创建损失函数之前考虑优化器。这是一种创造自适应损失函数的有趣方法,我们需要设置一些超参数,并根据这些值改变梯度,而不是调整优化器。

如上图所示,损失值在变小,这是因为Adaloss能够适应当前的误差损失值,使事情变得更加困难,从而获得更好的精度。
他们使用了不同的数据集 —— 医学图像和cat图像。

Adaloss真的很好,更好的收敛性。而且距离变得更精确了。

损失值变得更小了,模型也更精确了。

在这里我们可以看到,高斯分布的标准差变小了,并且在收敛时并没有减小。
哇,这是非常好的特点,在做人脸关键点检测的时候,我们能够为某些部位设置特定的σ值,这样就可以专注于人脸的特定部位。

眉毛和下巴的轮廓很难预测,因为它们可能被遮住了,或者因为那里的角点没有显示出来。

我们可以观察到作者的方法给出了很多稳定的结果,将这种方法用于不同的应用,如医疗手术,是另一个伟大的应用。

他们能够提高结果的状态 —— 这要归功于创建了一个新的损失函数,在这个函数中,随着训练的继续,问题会变得更加困难(梯度控制)。

—END—
英文原文:https://medium.com/@SeoJaeDuk/adaloss-adaptive-loss-function-for-landmark-localization-13315f9943d3

请长按或扫描二维码关注本公众号
喜欢的话,请给我个在看吧!
这篇关于Adaloss: 用于关键点定位的自适应损失函数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




