本文主要是介绍3D视觉引导机器人提升生产线的自动化水平和智能化程度,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
随着智能化技术的不断发展,汽车制造企业正积极寻求提升智能化水平的途径。富唯智能的3D视觉引导机器人抓取技术为汽车制造企业提供了一种高效、智能的自动化解决方案。
项目目标
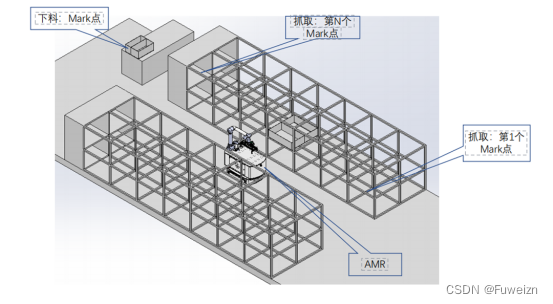
某汽车制造企业希望通过引入智能化技术提升生产线的自动化水平和智能化程度。他们希望实现脚垫上下料的自动化操作,减少人工干预,提高生产效率和产品质量。

解决方案
富唯智能的3D视觉引导机器人抓取技术成为了企业的首选。该解决方案通过高精度的3D视觉系统实现对脚垫的精准识别和定位,机器人根据预设的路径和抓取策略自动完成上下料操作。同时,该解决方案还具备实时监控和数据分析功能,能够为企业提供全面的生产数据支持。
实施该解决方案后,企业成功实现了生产线的智能化升级。机器人能够自主完成脚垫的上下料操作,大大减少了人工干预和等待时间。同时,高精度的定位和抓取技术保证了产品质量的一致性和稳定性。此外,实时监控和数据分析功能为企业提供了准确的生产数据支持,帮助企业实现更加精准的生产管理和决策。
这篇关于3D视觉引导机器人提升生产线的自动化水平和智能化程度的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


