本文主要是介绍【电机】了解无刷直流电机BLDC,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 介绍
无刷直流电机(Brushless Direct Current Motor,简称BLDCM)由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。这是模型中除了有刷电机以外用的最多的一种电机,无刷直流电机不使用机械的电刷装置,采用方波自控式永磁同步电机,与有刷电机相比,它将转子和定子交换,即无刷电机中使用电枢绕组作为定子,使用钕铁硼的永磁材料作为转子,以霍尔传感器取代碳刷换向器,性能上相较一般的传统直流电机有很大优势。具有高效率、低能耗、低噪音、超长寿命、高可靠性、可伺服控制、无级变频调速等优点,而缺点则是比有刷的贵、不好维护,广泛应用于航模、高速车模和船模。
不过,单个的无刷电机不是一套完整的动力系统,无刷电机基本必须通过无刷控制器才能实现连续不断的运转。普通的碳刷电机旋转的是绕组,而无刷电机不论是外转子结构还是内转子结构旋转的都是磁铁。
无刷电机的定子是产生旋转磁场的部分,能够支撑转子进行旋转,主要由硅钢片、漆包线、轴承、支撑件构成;而转子则是黏贴了钕铁硼磁铁、在定子旋转磁场的作用进行旋转的部件,主要由转轴、磁铁、支持件构成。除此之外,定子与转子组成的磁极对数还影响着电机的转速与扭力。
2 重要参数
2.1 额定电压
无刷电机适合的工作电压,其实无刷电机适合的工作电压非常广,额定电压是指定了负载条件而得出的情况。例如说,2212-850KV 电机指定了1045 螺旋桨的负载,其额定工作电压就是11V。如果减小负载,例如带7040 螺旋桨,那这个电机完全可以工作在22V 电压下。但是这个工作电压也不是无限上升的,主要受制于电子控制器支持的最高频率。所以说,额定工作是由工作环境决定的。
2.2 KV值
有刷直流电机是根据额定工作电压来标注额定转速的,无刷电机引入了KV 值的概念,而让用户可以直观的知道无刷电机在具体的工作电压下的具体转速。实际转速=KV 值 × 工作电压,这就是KV 的物理意义,就是在1V 工作电压下每分钟的转速。无刷直流电机的转速与电压呈正比关系,电机的转速会随着电压上升而线性上升。例如,2212-850KV 电机在10V 电压下的转速就是:850 × 10=8500RPM(RPM,每分钟转速)。KV 值与匝数是呈反比例关系的,例如2212-850KV,匝数是30T(15 圈),那在28T 的情况下的KV 值是:850KV × 30T / 28T=910KV。
2.3 转矩与转速
转矩:(力矩、扭矩)电机中转子产生的可以用来带动机械负载的驱动力矩,我们可以理解为电机
的力量。
转速: 电机每分钟的转速。
电机的转矩和转速在同一个电机内永远是一个此消彼长的关系,基本可以认为转矩和转速的乘积是一个定数,即同一个电机的转速越高,必定其转矩越低,相反也依然。不可能要求个电机的转速也更高,转矩也更高,这个规律通用于所有电机。例如:2212-850KV 电机,在11V 的情况下可以带动1045 桨,如果将电压上升一倍,其转速也提高一倍,如果此时负载仍然是1045 桨,那该电机将很快因为电流和温度的急剧上升而烧毁。
2.4 最大电流和最大功率
最大电流: 电机能够承受并安全工作的最大电流。
每个电机都有自己的力量上限,最大功率就是这个上限,如果工作情况超过了这个最大功率,就会导致电机高温烧毁。
2.5 槽极结构(N:槽数,P:极数)
铁芯极数(槽数)∶ 定子硅钢片的槽数量。
磁钢极数(极数)∶ 转子上磁钢的数量。
模型常见的内转子无刷电机结构有: 3N2P(有感电机常用)、12N4P(大部分内转子电机)模型常见的外转子无刷电机结构有:9N6P、9N12P、12N8P、12N10P、12N14P、18N16P、24N20P。
模型用内转子无刷电机极数不高的原因: 目前内转子电机多用于减速使用,所以要求的转速都比较高。电子转速= 实际转速 × 电机极对数,电子控制器支持的最高电子转速往往都是一个定数,所以如果电机极对数太高的话,支持的最高电机转速就会下降,所以目前的内转子电机极数都是4 以内。
2.6 其他设计驱动需要的参数
定子电感:电动机静止时的定子绕组两端的电感。
定子电阻:在20℃ 下电动机每相绕组的直流电阻。
反电动势系数:在规定条件下,电动机绕组开路时,单位转速在电枢绕组中所产生的线感应电动势值。
3 直流无刷电机工作原理
在学习工作原理前我们先来学习一下安培定则,安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感线方向间关系的定则。通电直导线中的安培定则(安培定则一):用右手握住通电直导线,让大拇指指向电流的方向,那么四指指向就是磁感线的环绕方向;通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端是通电螺线管的N 极,如下图1所示。
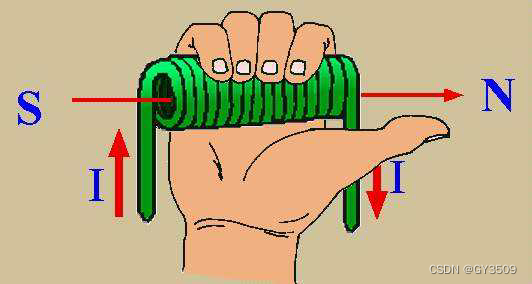
图1
我们知道在磁极中同名相吸,异名相斥,及N 极与S 极相互吸引,N 极与N 极和S 极与S 极相互排斥,下面我们来看看一个直流模型,如下图2所示。
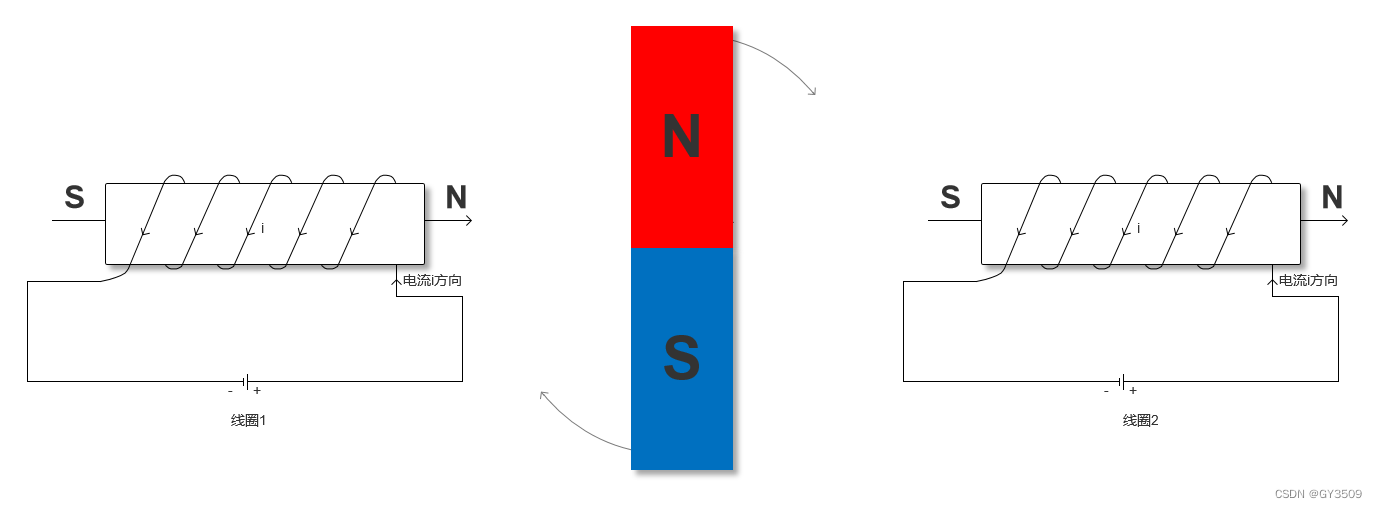
图2
当两边的线圈通上电后,由右手螺旋定则可知两个线圈中将会产生方向向右的磁场,而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,N 极与S 极相互吸引,这样内转子就会按顺时针方向旋转了。当转子旋转到如图3所示的水平位置时转子将不会受到作用力。
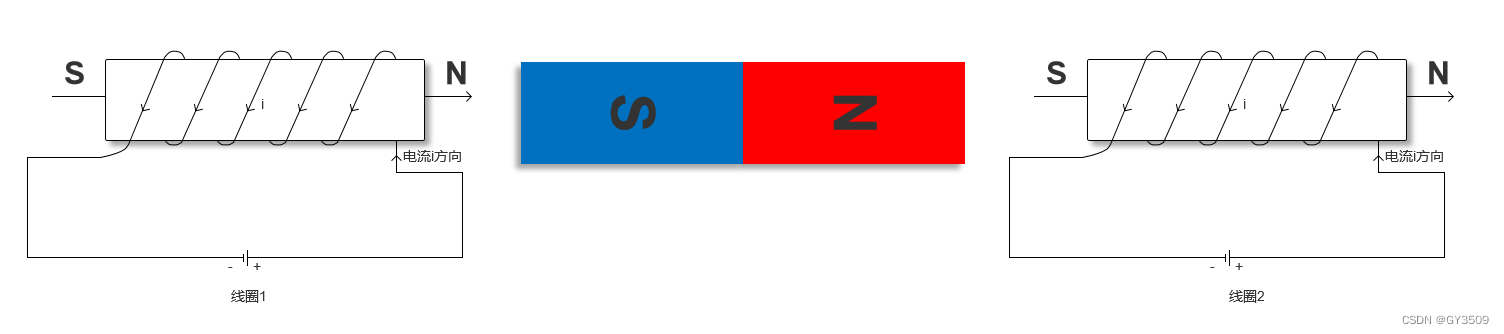
图3
但是由于惯性的作用转子将会继续旋转,当转子旋转至水平位置时,交换两个线圈中的电流方向,这时转子就会继续向顺时针方向转动了。当转子再次旋转至水平位置时,再次交换两个线圈中的电流方向,这样转子就可以一直旋转了。
有了上面的基础,我们再来看下面的“三相星形联结的二二导通方式”。
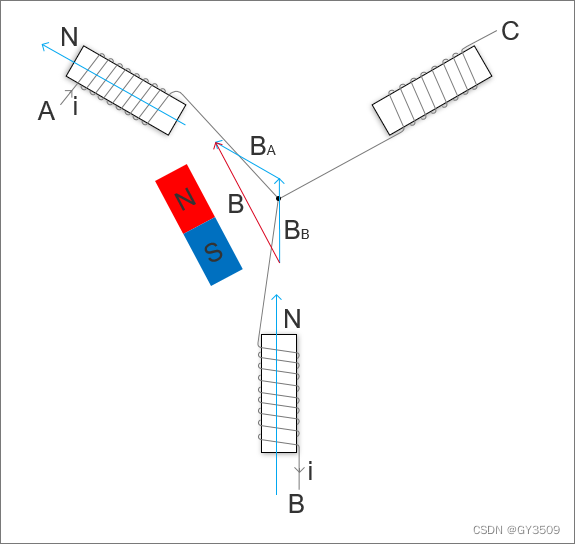
图4
在A 端上电源正极,在B 端接电源负极,那么可以在线圈A 和B 中可以产生如图所示的磁场,因为磁场强度是矢量,所以由磁场BB 和BA 可以得到合成磁场B。此时转子就会保持在图中方向。
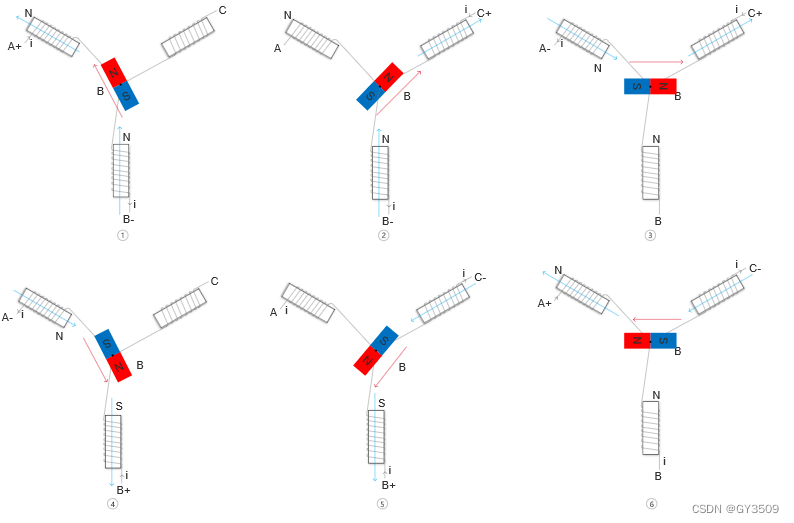
图5
想要转子转动就需要接入不同的电压,我们来分析一下图中的6 个过程。
1. 在A 端接入正电压,B 端接入负电压,C 端悬空,转子将会旋转至图中1 的位置。
2. 在1 的基础上,C 端接入正电压,B 端接入负电压,A 端悬空,转子将会从1 的位置旋转至图中2 的位置。
3. 在2 的基础上,C 端接入正电压,A 端接入负电压,B 端悬空,转子将会从2 的位置旋转至图中3 的位置。
4. 在3 的基础上,B 端接入正电压,A 端接入负电压,C 端悬空,转子将会从3 的位置旋转至图中4 的位置。
5. 在4 的基础上,B 端接入正电压,C 端接入负电压,A 端悬空,转子将会从4 的位置旋转至图中5 的位置。
6. 在5 的基础上,A 端接入正电压,C 端接入负电压,B 端悬空,转子将会从5 的位置旋转至图中6 的位置。
当转子旋转到位置6 时,在重复1 的供电状态,转子将会从6 的位置旋转到1 的位置。在经过上面的6 个过程后转子正好转了一圈,我们将这种驱动方法称为6 拍工作方式,每次电压的变化称为换相。想要电机持续的旋转我们只要按上面转子相应的位置接入相应的电压即可。
这篇关于【电机】了解无刷直流电机BLDC的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!