相关文章

3月份目标——刷完乙级真题
https://www.patest.cn/contests/pat-b-practisePAT (Basic Level) Practice (中文) 标号标题通过提交通过率1001害死人不偿命的(3n+1)猜想 (15)31858792260.41002写出这个数 (20)21702664840.331003我要通过!(20)11071447060.251004成绩排名 (20)159644

【机器学习】半监督学习可以实现什么功能?
目录 一、什么是机器学习二、半监督学习算法介绍三、半监督学习算法的应用场景四、半监督学习可以实现什么功能? 一、什么是机器学习 机器学习是一种人工智能技术,它使计算机系统能够从数据中学习并做出预测或决策,而无需明确编程。它涉及到使用算法和统计模型来分析大量数据,识别其中的模式和关系,并利用这些信息来预测未来事件或做出决策。机器学习可以应用于各种领域,包括图像识别、自然语言
好书推荐《深度学习入门 基于Python的理论与实现》
如果你对Python有一定的了解,想对深度学习的基本概念和工作原理有一个透彻的理解,想利用Python编写出简单的深度学习程序,那么这本书绝对是最佳的入门教程,理由如下: (1)撰写者是一名日本普通的AI工作者,主要记录了他在深度学习中的笔记,这本书站在学习者的角度考虑,秉承“解剖”深度学习的底层技术,不使用任何现有的深度学习框架、尽可能仅使用基本的数学知识和Python库。从零创建一个
【图像识别系统】昆虫识别Python+卷积神经网络算法+人工智能+深度学习+机器学习+TensorFlow+ResNet50
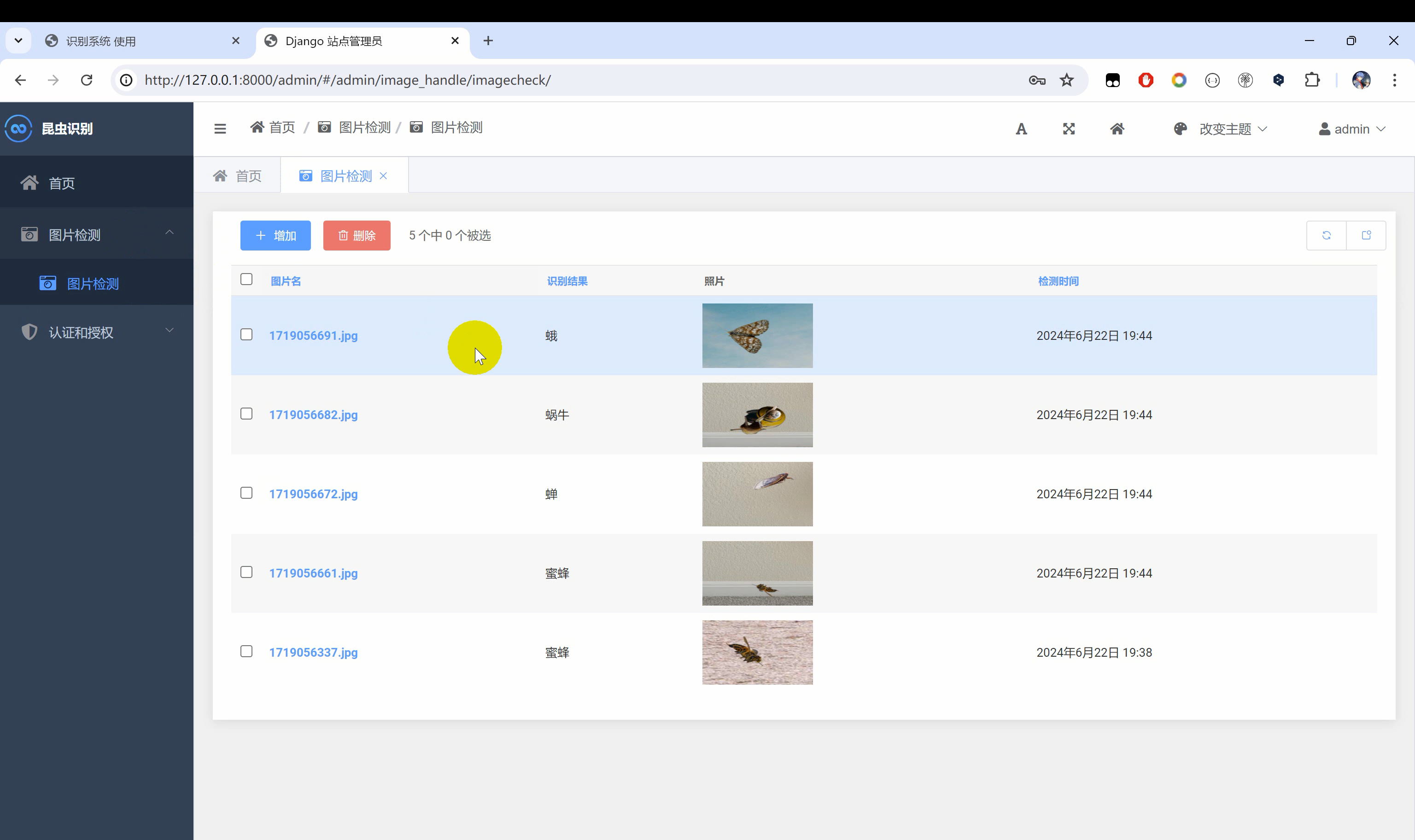
一、介绍 昆虫识别系统,使用Python作为主要开发语言。通过TensorFlow搭建ResNet50卷积神经网络算法(CNN)模型。通过对10种常见的昆虫图片数据集(‘蜜蜂’, ‘甲虫’, ‘蝴蝶’, ‘蝉’, ‘蜻蜓’, ‘蚱蜢’, ‘蛾’, ‘蝎子’, ‘蜗牛’, ‘蜘蛛’)进行训练,得到一个识别精度较高的H5格式模型文件,然后使用Django搭建Web网页端可视化操作界面,实现用户上传一

基于深度学习的轮廓检测
基于深度学习的轮廓检测 轮廓检测是计算机视觉中的一项关键任务,旨在识别图像中物体的边界或轮廓。传统的轮廓检测方法如Canny边缘检测和Sobel算子依赖于梯度计算和阈值分割。而基于深度学习的方法通过训练神经网络来自动学习图像中的轮廓特征,能够在复杂背景和噪声条件下实现更精确和鲁棒的检测效果。 深度学习在轮廓检测中的优势 自动特征提取:深度学习模型能够自动从数据中学习多层次的特征表示,而不需要
深度神经网络:解锁智能的密钥
深度神经网络:解锁智能的密钥 在人工智能的浩瀚星空中,深度神经网络(Deep Neural Networks, DNNs)无疑是最耀眼的那颗星。它以其强大的学习能力、高度的适应性和广泛的应用场景,成为了我们解锁智能世界的一把密钥。本文将带你走进深度神经网络的神秘世界,探讨其原理、应用以及实用操作技巧。 一、深度神经网络概述 深度神经网络,顾名思义,是一种具有多个隐藏层的神经网络。与传统的神经
基于动力学的六自由度机器人阻抗恒力跟踪控制
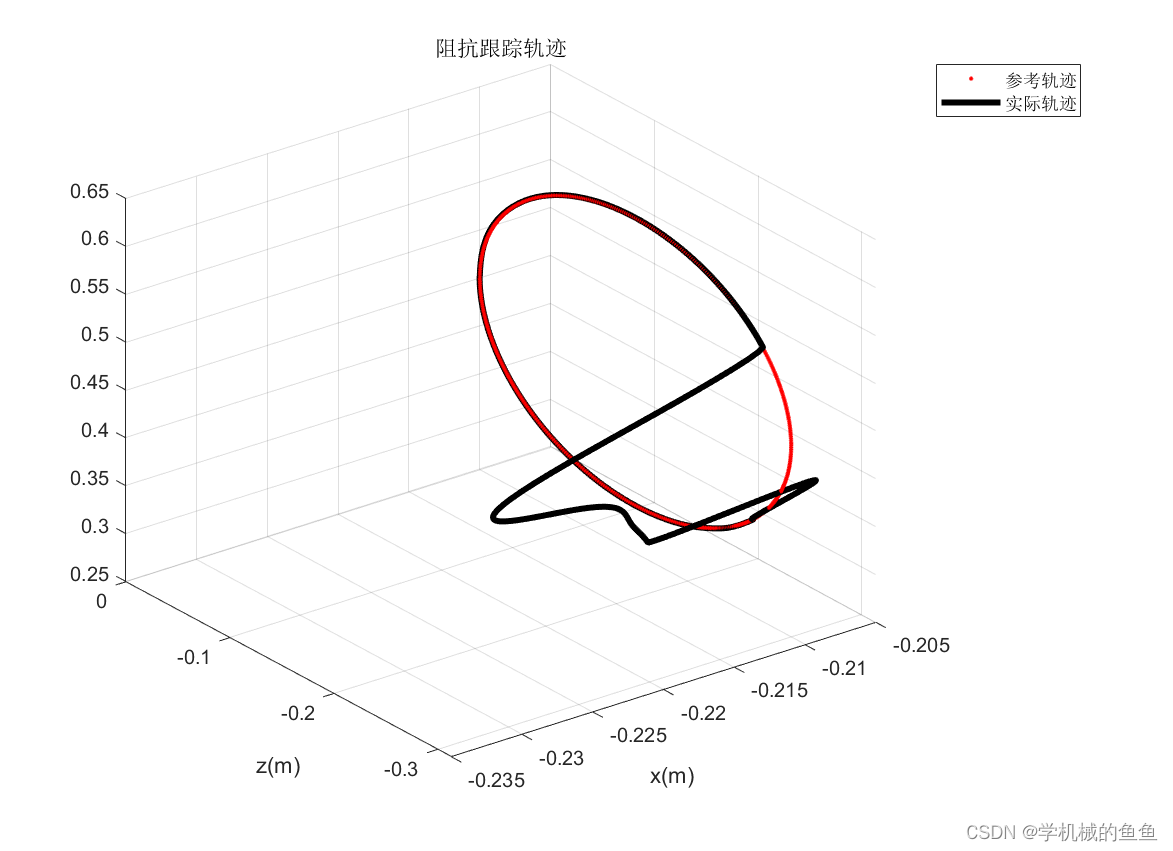
1.整个代码的控制流程图如下: 2.正逆运动学计算 略 3.动力学模型 采用拉格朗日法计算机械臂的动力学模型,其输入的是机械臂的关节角度、角速度和角加速度;其中M、C、G本别是计算的惯性力、科式力和重力项,相关部分如下: 4.RBF神经网络自适应参数调节 采用RBF自适应调节阻抗控制器参数,末端每个方向单独进行参数的调整,其中rbf的输入的是力和位置,输出的是阻抗控制器的参数,rb
音视频开发基础知识(1)——图像基本概念
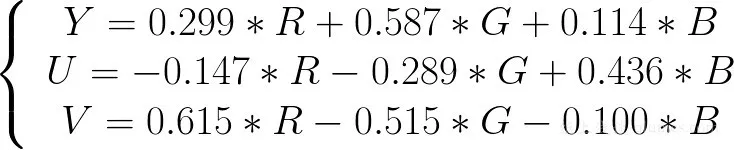
像素 **像素是图像的基本单元,一个个像素就组成了图像。你可以认为像素就是图像中的一个点。**在下面这张图中,你可以看到一个个方块,这些方块就是像素。 分辨率 图像(或视频)的分辨率是指图像的大小或尺寸。我们一般用像素个数来表示图像的尺寸。比如说一张1920x1080的图像,前者1920指的是该图像的宽度方向上有1920个像素点,而后者1080指的是图像的高 度方向上有1080个像素点。

【Python机器学习】NMF——将NMF应用于人脸图像
将NMF应用于之前用过的Wild数据集中的Labeled Faces。NMF的主要参数是我们想要提取的分量个数。通常来说,这个数字要小于输入特征的个数(否则的话,将每个像素作为单独的分量就可以对数据进行解释)。 首先,观察分类个数如何影响NMF重建数据的好坏: import mglearn.plotsimport numpy as npimport matplotlib.pyplot as

深度学习入门篇(一)
首先明确什么是机器学习,换言之机器学习程序相较于其他计算机硬编码程序有哪些能力? 硬编码计算机程序试图以极其复杂的形势化规则描述这个世界,但是对于人类而言非常简单的语音和图像却好像不是那么容易以一种形式化的语言来描述的。在追逐计算机智能发展的进程中,人们为此做了大量的努力,比如“知识库方法(Cyc)”和大量的专家系统。最后都难以在业界取得成功,因为尽善尽美形式化描述本身就是难以实现的。 所以A