本文主要是介绍树莓派4B_OpenCv学习笔记4:测试摄像头_imread加载显示图像_imwrite保存图片,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi)
本人所用树莓派4B 装载的系统与版本如下:
版本可用命令 (lsb_release -a) 查询:
Opencv 版本是4.5.1:
今日对之前的测试CSI摄像头函数进行一些理解说明,
然后就尝试使用 imread 方法读取照片,imwrite方法保存图片
目录
imread加载显示图像:
编写程序:
运行程序与结果:
imread('Path',flag)函数详解:
imwrite方法保存图片:
编写程序:
运行程序与结果:
网上学习网址贴出:
imread加载显示图像:
编写程序:
编写一个文件名为“Load_img.py”的python程序如下:
# coding=utf-8 import cv2 # 创建一个窗口,并允许调整窗口大小 cv2.namedWindow('image', cv2.WINDOW_NORMAL) # 读取图片,第二个参数0表示以灰度并以1/4大小模式读取 img = cv2.imread('/home/pi/Pictures/Load_test.jpg', 33) # 如果图片读取成功,则显示图片 if img is not None: cv2.imshow('image', img) # 等待任意按键按下 key = cv2.waitKey(0) # 如果按下的是'q'键,则退出程序 if key & 0xFF == ord('q'): cv2.destroyAllWindows() else: print("Load_Failed...") # 无论是否按下'q'键,都需要在程序结束前销毁窗口 # 但由于我们在上面的if块中已经销毁了窗口(如果按下'q'),这里不需要再次销毁 # 如果上面的if块没有执行(即图片未加载),则这里也不需要销毁窗口 # 因为没有窗口被创建在读取图片代码处需要注意文件路径以及图片类型名称:
代码中我是加载了位于/home/pi/Pictures/ 目录下的 Load_test.jpg 图片:
这个可以自己随便拍张图片放在指定目录来测试,目录与图片名称填完整正确了就可以
其次就是文件头的这个注释不可去除:
程序包含了一些非UTF-8编码的字符,这是Python解释器在读取文件时声明文件编码的注释


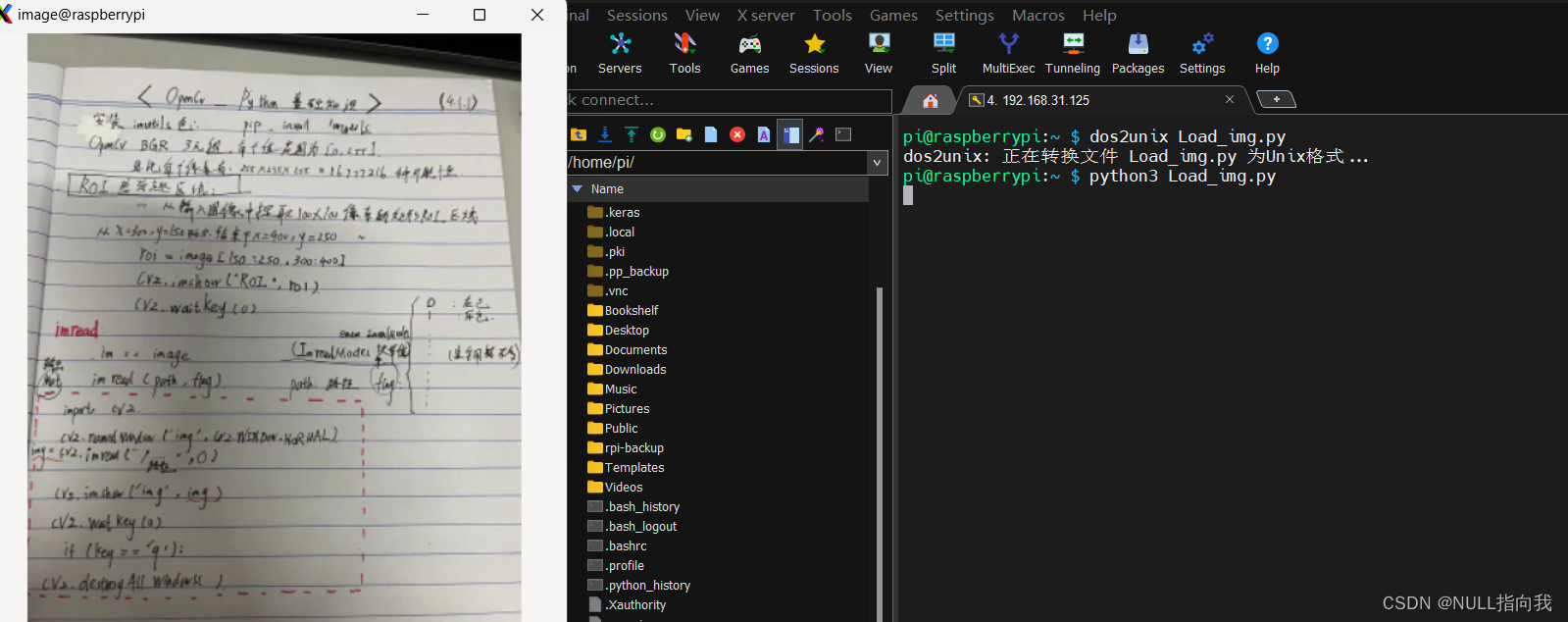
运行程序与结果:
使用
dos2unix工具:程序包含了一些非UTF-8编码的字符所以需要用工具进行一些转换:
如果未安装:
sudo apt-get update sudo apt-get install dos2unix如果安装过了:
dos2unix <文件名>.py
运行结果:
python3 Load_img.py

imread('Path',flag)函数详解:
以下是
imread函数中常用的枚举flag值及其具体意义:
- IMREAD_UNCHANGED (-1):
- 如果设置,返回加载的图像原样(如果有 alpha 通道,则保留;否则,会裁剪)。
- IMREAD_GRAYSCALE (0):
- 如果设置,始终将图像转换为灰度图像并返回。
- IMREAD_COLOR (1):
- 如果设置,返回彩色图像。这是默认参数,图像的透明度会被忽略。
- IMREAD_ANYDEPTH (2):
- 如果设置,并且载入的图像深度为 16 或 32 位,则返回对应深度的图像;否则,转换为 8 位图像再返回。
- IMREAD_ANYCOLOR (4):
- 这个标志的具体作用在参考文章中未明确说明,但在某些上下文中,它可能与颜色空间的读取方式有关。
- IMREAD_LOAD_GDAL (8):
- 如果设置,使用 GDAL 驱动程序加载图像。GDAL 是一个用于栅格地理空间数据格式的库。
- IMREAD_REDUCED_GRAYSCALE_2 (16):
- 如果设置,返回 1/2 大小的灰度图像。
- IMREAD_REDUCED_COLOR_2 (17):
- 如果设置,返回 1/2 大小的彩色图像。
- IMREAD_REDUCED_GRAYSCALE_4 (32):
- 如果设置,返回 1/4 大小的灰度图像。
- IMREAD_REDUCED_COLOR_4 (33):
- 如果设置,返回 1/4 大小的彩色图像。
- IMREAD_REDUCED_GRAYSCALE_8 (64):
- 如果设置,返回 1/8 大小的灰度图像。
- IMREAD_REDUCED_COLOR_8 (65):
- 如果设置,返回 1/8 大小的彩色图像。
- IMREAD_IGNORE_ORIENTATION (128):
- 如果设置,在读取图像时忽略 EXIF 中的方向信息。
imwrite方法保存图片:
编写程序:
这个程序可以做到打开摄像头,实时显示捕获视频流,
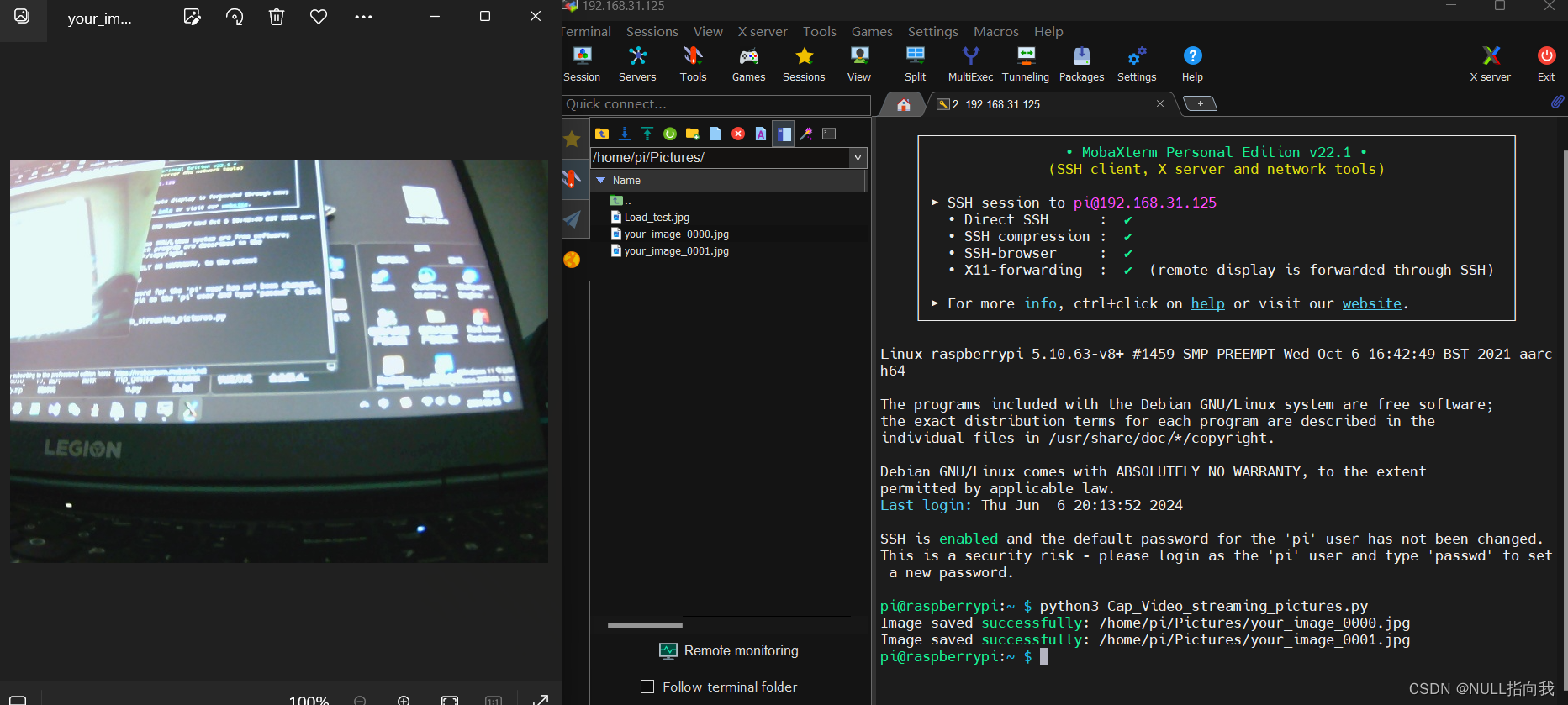
按下键盘‘C’可以截获保存一张照片在路径‘/home/pi/Pictures/’(注意要有这个文件夹Pictures),图片名称为‘your_image_0000.jpg’(0000是图片编号;会递增)
按下键盘‘Q’键就能退出这个程序了
# coding=utf-8 import cv2 # 打开摄像头,0通常是默认摄像头的索引 cap = cv2.VideoCapture(0) if not cap.isOpened(): print("Error opening video stream or file") else: frame_count = 0 # 初始化帧计数器 while True: # 读取一帧图像 ret, frame = cap.read() # 检查帧是否正确读取 if not ret: print("Can't receive frame (stream end?). Exiting ...") break # 显示图像 cv2.imshow('Video Stream', frame) # 等待键盘输入,如果按下'q'则退出循环 key = cv2.waitKey(1) & 0xFF if key == ord('q'): break # 如果按下'c',则保存当前帧 elif key == ord('c'): # 定义保存图片的文件路径和名称,包含递增的编号 # 使用04d来确保编号是四位数,并填充前导零 file_path = f'/home/pi/Pictures/your_image_{frame_count:04d}.jpg' cv2.imwrite(file_path, frame) print(f"Image saved successfully: {file_path}") frame_count += 1 # 递增计数器 # 释放摄像头 cap.release() # 关闭所有OpenCV窗口 cv2.destroyAllWindows()
运行程序与结果:
发现确实每次按下‘C’就保存一张图片并进行了终端提示:
网上学习网址贴出:
3-3 如何通过OpenCV加载显示图片_哔哩哔哩_bilibili
3-5 如何通过OpenCV保存文件_哔哩哔哩_bilibili
这篇关于树莓派4B_OpenCv学习笔记4:测试摄像头_imread加载显示图像_imwrite保存图片的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







