4b专题
4B参数秒杀GPT-3.5:MiniCPM 3.0惊艳登场!
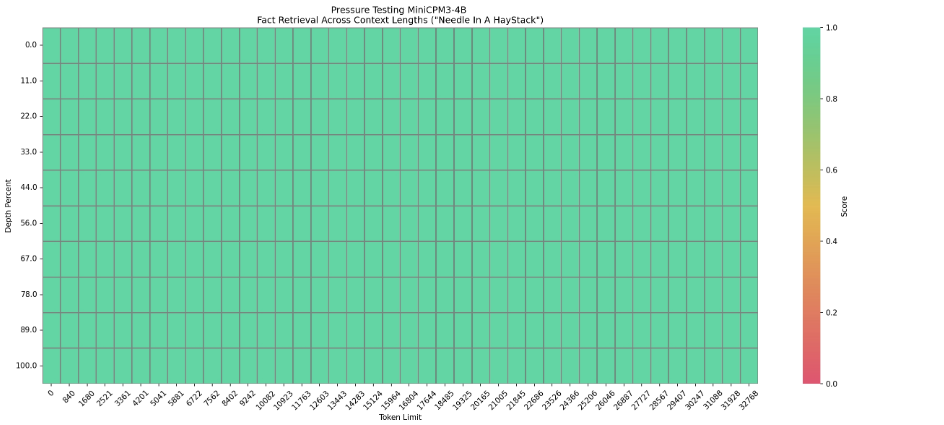
面壁智能 在 AI 的世界里,总有那么几个时刻让人惊叹不已。面壁智能推出的 MiniCPM 3.0,这个仅有4B参数的"小钢炮",正在以惊人的实力挑战着 GPT-3.5 这个曾经的AI巨人。 MiniCPM 3.0 MiniCPM 3.0 MiniCPM 3.0 目前的主要功能有: 长上下文功能:原生支持 32k 上下文长度,性能完美。我们引入了

1-8 图像腐蚀 opencv树莓派4B 入门系列笔记
目录 一、提前准备 二、代码详解 kernel=np.ones((2,2),np.uint8) _, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY) eroded_image=cv2.erode(binary_image,kernel,iterations=1) eroded_image2=cv2.ero

1-9 图像膨胀 opencv树莓派4B 入门系列笔记
目录 一、提前准备 二、代码详解 kernel = np.ones((3, 3), np.uint8) _, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY) dilated_image = cv2.dilate(binary_image, kernel, iterations=1) 三、运行现象 四

构建智能门禁安防系统:树莓派 4B、OpenCV、SQLite 和 MQTT 的应用(代码示例)
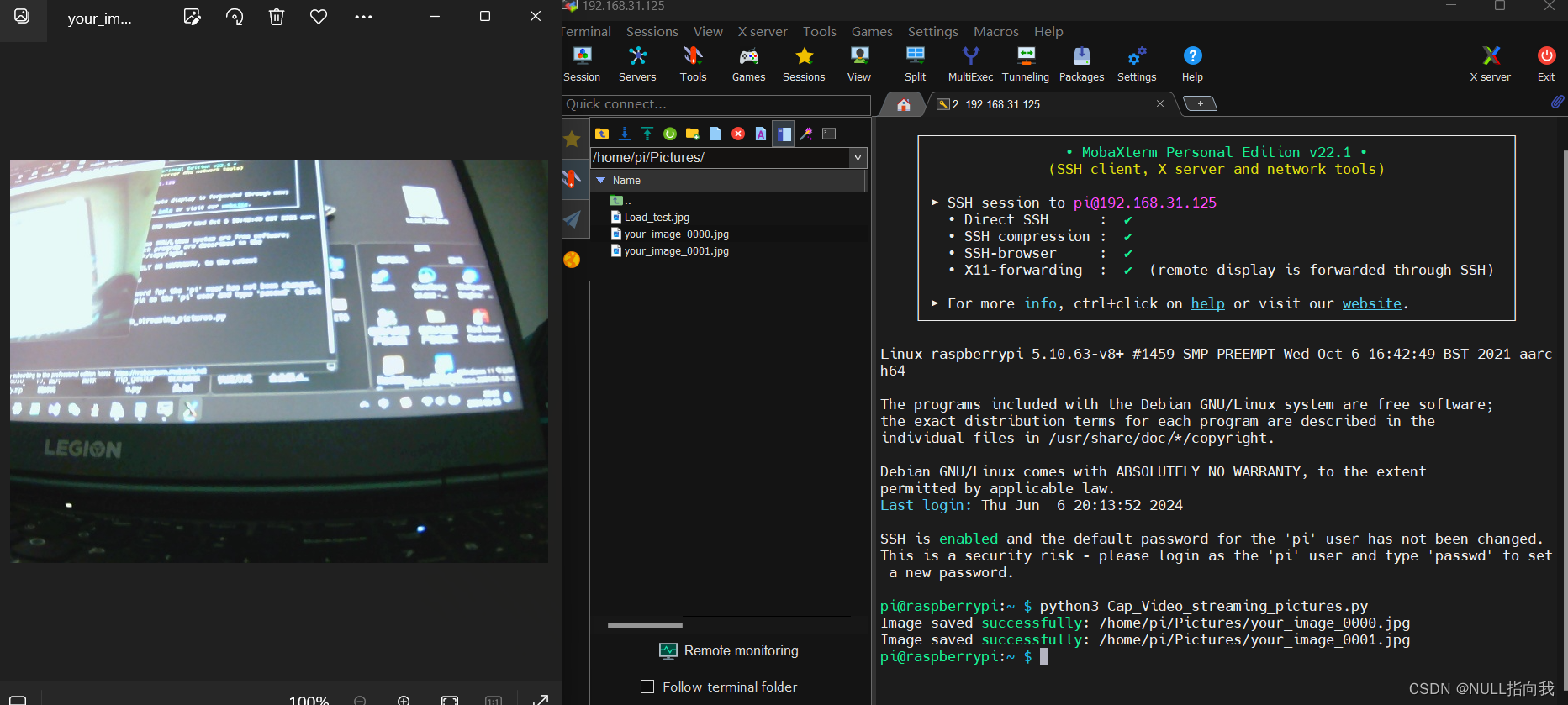
一、项目概述 1.1 项目目标和用途 本项目旨在开发一个智能门禁安防系统,该系统利用摄像头和人脸识别技术,结合本地人脸库,实现对进出人员的自动识别和管理。系统能够实时记录进出人员的信息,并对未注册人员进行警报提示。通过与物联网平台的集成,用户可以远程监控和管理门禁系统,提升安全性和管理效率。 1.2 解决的问题和价值 传统的门禁系统往往依赖于钥匙或密码,存在安全隐患和管理不便的问题。本项目

树莓派 4b 安装 Kubernetes
树莓派 4b 安装 Kubernetes K3S 是 Rancher 提供的用于边缘硬件的简化版本的 Kubernetes,基本能力和 Kubernetes 接近,适用于 IoT 硬件,支持 x86_64, ARMv7, ARM64 等 安装 在 Ubuntu Server 21.04 上安装 K3S 1. 安装 Docker apt update & apt upgrade & apt
【高中数学/极值/判别式法】已知实数a和b,b在(0,1)区间,a-b=1,则1/(a-1)+1/(5-4b)的最小值是?
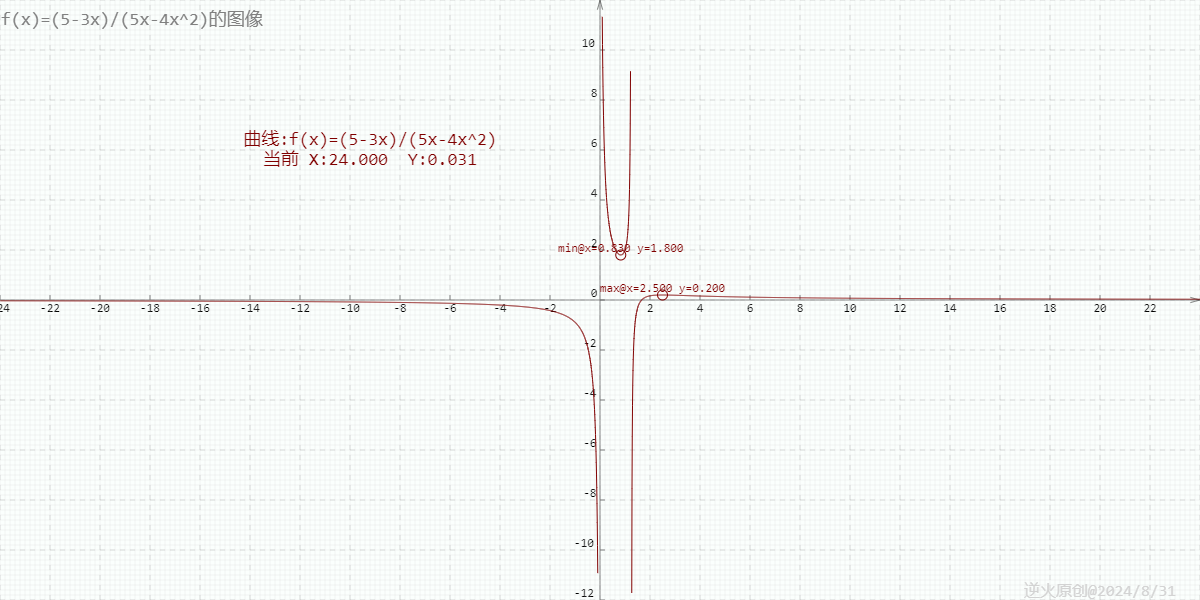
【问题】 已知实数a,b,b在(0,1)区间,a-b=1,则1/(a-1)+1/(5-4b)的最小值是? 【来源】 《解题卡壳怎么办 高中数学解题智慧点剖析》P34 余继光 苏德矿合著 浙江大学出版社出版 【破题点】 将a-1用b取代,发现结果是二次式相除,正好可用判别式法。 【解答】 由a-b=1得到a-1=b 于是原式=1/b+1/(5-4b) 设b为x,结果为y,得到表达式

树莓派4B智能小车-安装Raspbian系统
基于树莓派4的智能小车买后总结 吐下血,买了套Raspberry PI 4B智能小车,开发些有趣的应用。 对比3B+和4B,发现整个电路更简洁、支持蓝牙5即更是再无所求了。这样,就可以做很多开箱即用的快速开发,比如边缘网关、机器人、流媒体服务器、高端的设备(广告机,红酒、咖啡等自动售卖机。 给SD卡安装Raspbian系统 下载Raspberry Pi Imager工具 https:/

树莓派4B设置AP热点步骤
树莓派4B设置AP热点步骤:先进入root模式 预先进行apt-get update 第1步:安装network-manager sudo apt-get install network-manager 第2步:安装git apt-get install gitapt-get install util-linux procps hostapd iproute2 iw haveged d
树莓派4B刷入KODI作为机顶盒
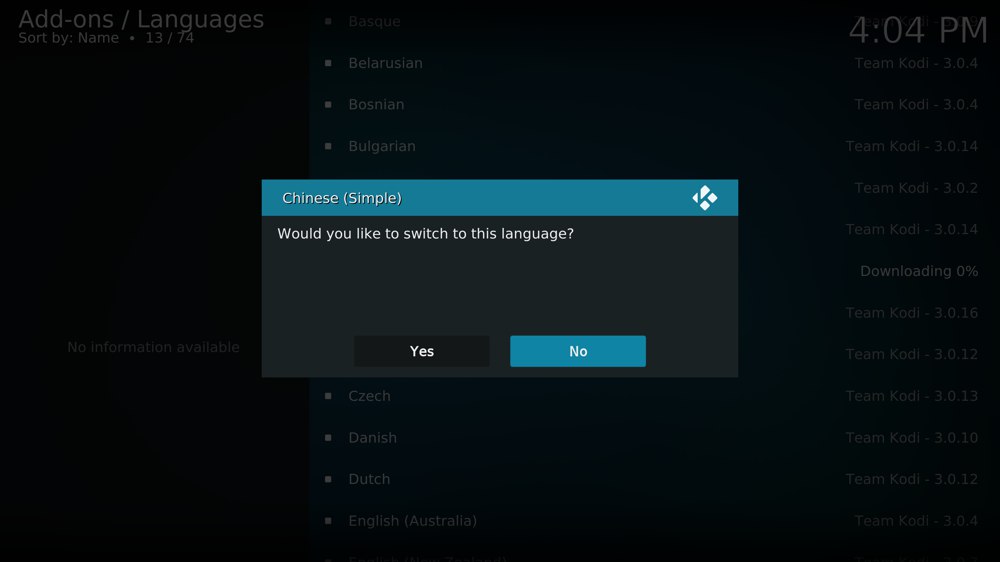
LibreELEC Raspberry - LibreELEC Download - OSMC 使用LibreELEC USB-SD Creator进行系统烧写, LibreELEC USB-SD Creator下载地址 因为Kodi语言包是以插件的形式存在,不是集成到安装包里,有时候网络原因不能连接到Kodi的服务器,在设置Kodi语言时“regional”-“language”只有

树莓派4B_OpenCv学习笔记10:调整视频帧大小
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: Opencv 版本是4.5.1: 今日学习一下如何降低视频帧像素 文章提供测试代码讲解,整体代码贴出、测试效果图 目录 调整视频帧大小: 编写代码: 效果展示: 解决motion视频流卡

【树莓派】树莓派4B无法运行64位程序
问题: 在linux_x64上动态链接库无法在树莓派4B上运行 尝试一 官方推出了,检查boot目录下是否有kernel8.img如果没有就 rpi-update 然后添加arm_64bit=1到config.txt 执行uname -a 你会看到内核从v7l(armhf)变v8(arm64)了 结果: 还是不行,getconf LONG_BIT 还是32 尝试二: 安装一个64位的系
树莓派4B_OpenCv学习笔记5:读取窗口鼠标状态坐标_TrackBar滑动条控件的使用
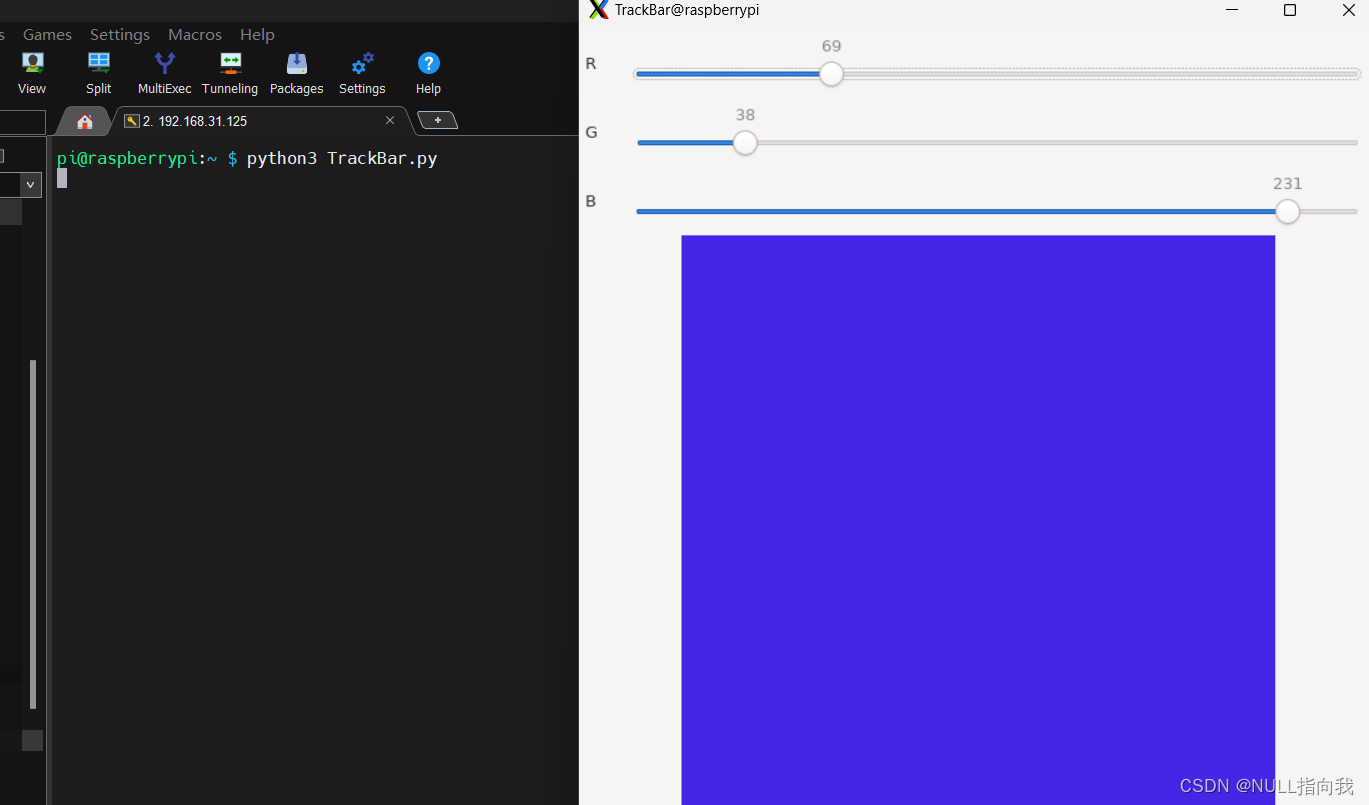
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: Opencv 版本是4.5.1: 今日学习:读取窗口鼠标状态坐标_TrackBar滑动条控件的使用 目录 读取鼠标状态坐标: 鼠标回调函数中参数的值: event参数: flags参数: 程序
树莓派4B 零起点(二) 树莓派 更换软件源和软件仓库
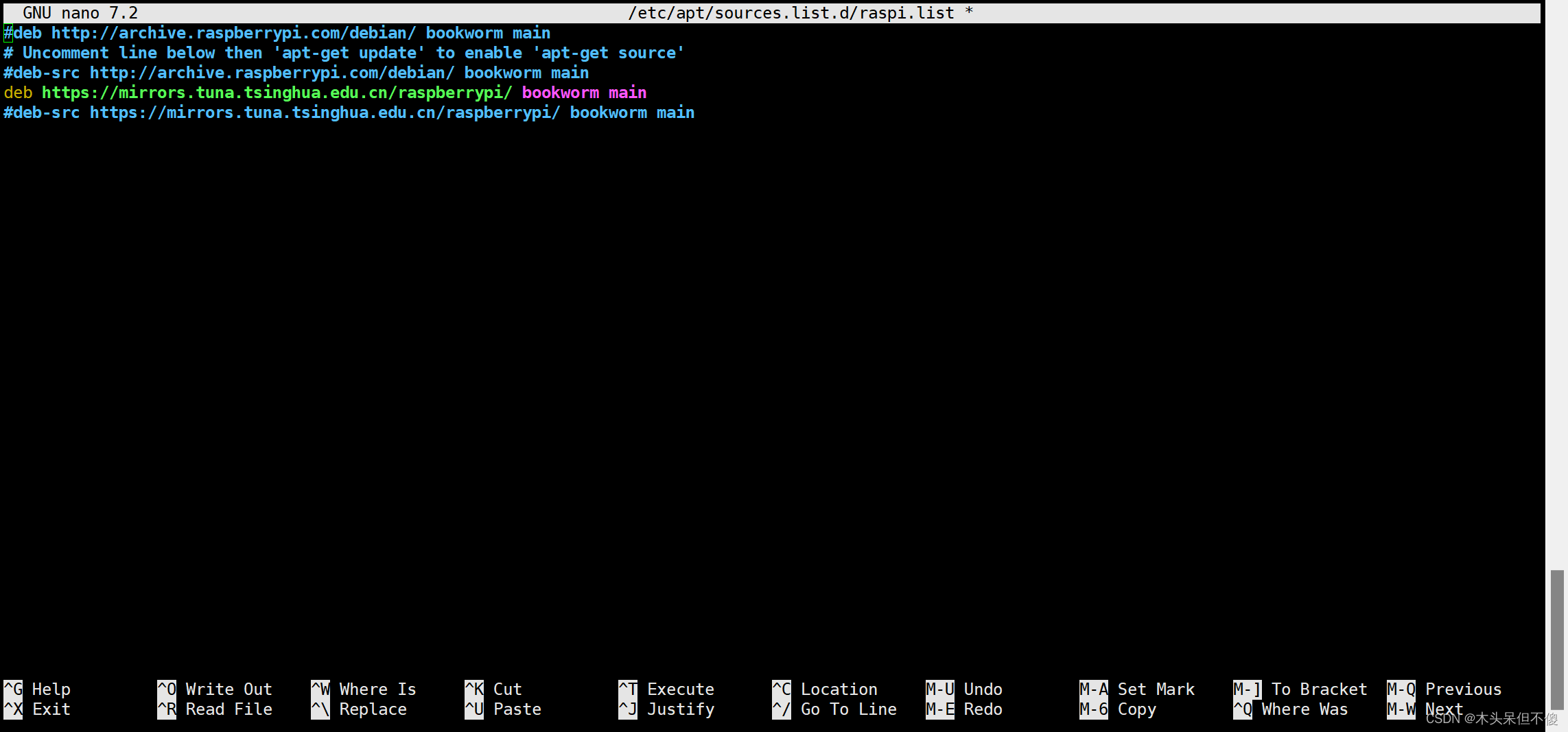
目录 一、准备工作,查看自己的树莓派版本 二、安装HTTPS支持 三、更换为清华源 1、更换Debian软件源 2,更换Raspberrypi软件仓库 四、进行软件更新 接前章,我们的树莓派已经启动起来了,接下来要干的事那就是更换软件源和软件仓库,更换国内的镜像可以大大提高软件下载速度,提升我们的使用体验。 说干就干,方法如下:(无屏操作的话

树莓派4b安装宝塔面板
1、打开命令窗口,执行如下命令 #更新sudo apt-get updatesudo apt-get upgrade#切换root权限sudo su root#安装宝塔面板wget -O install.sh http://download.bt.cn/install/install-ubuntu_6.0.sh && bash install.sh 安装过程有点久,会持续半个小时
树莓派4B 零起点(一) 树莓派 无屏 从购买到启动
目录 背景 一. 准备工作 二、烧录系统 三、连接系统 背景 准备开发ROS机器人,在淘宝上购买的树莓派4B(4G)到货了,配件都很齐全,那么就直接开箱验货。 一. 准备工作 1 、硬件:(如下图) (我的购买链接: 树莓派4B 4g 套件) 2 、软件: (1)树莓派官方系统镜像,4GB版本推荐使用 Raspbery Pi OS (64Bit),
树莓派4B_OpenCv学习笔记4:测试摄像头_imread加载显示图像_imwrite保存图片
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: Opencv 版本是4.5.1: 今日对之前的测试CSI摄像头函数进行一些理解说明, 然后就尝试使用 imread 方法读取照片,imwrite方法保存图片 目录 imread加载显示图像:

树莓派4B 学习笔记3: 系统自动更新时间_测试CSI摄像头_安装OpenCv_4.6(未成功编译源码)_备份树莓派镜像
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本文我只是安装了OpenCv 4.6,但编译源码失败了!有关 OpenCv 部分仅做笔记暂存! 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: 系统时间自动更新_安装OpenCv_测试CSI摄像头_预装OpenCv的系统镜像分享(持续更新
全志H616(BIGTREETECH CB1)和 博通BCM2711(树莓派4B)CPU对比测试
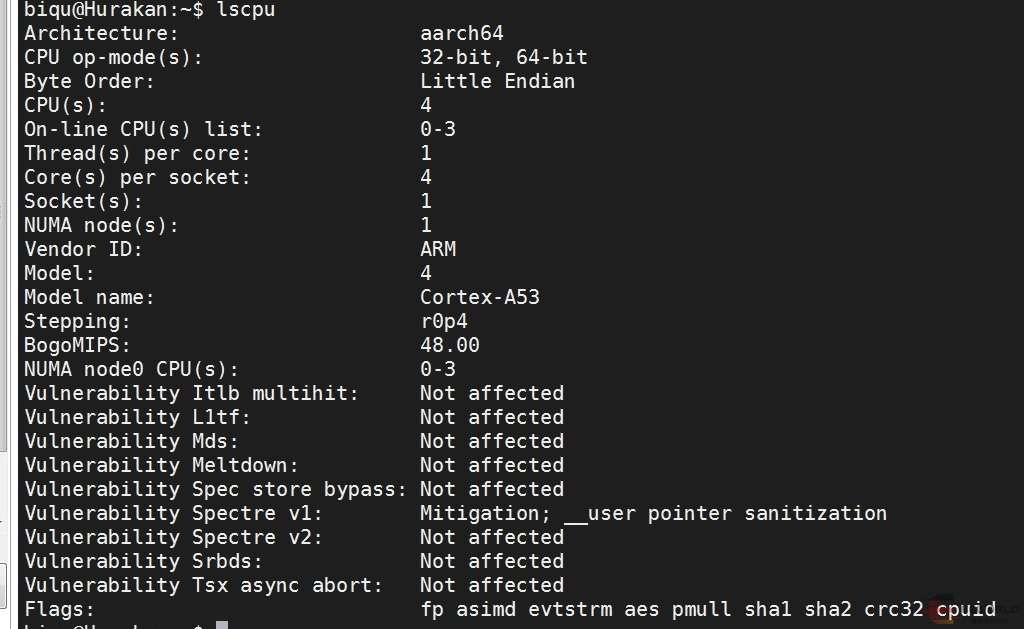
一,实物对比图: BIGTREETECH CB1的底板接口的分布和树莓派4B是一样的,但是没有树莓派的音频接口,底板也不能放到树莓派4B的官方外壳里,因为底板的背面有一个DSI接口,高度超出了。 二,开发板硬件配置对比 可以看出H616为4核A53@1.5G,树莓派4B为4核A72@1.5G,树莓派4B的CPU规格略高一些,但它俩都是28nm制程工艺。 三,CPU规格对比: 这个上一个AR
树莓派4B 学习笔记1:TF卡系统盘烧录_初次启动_远程端连接配置
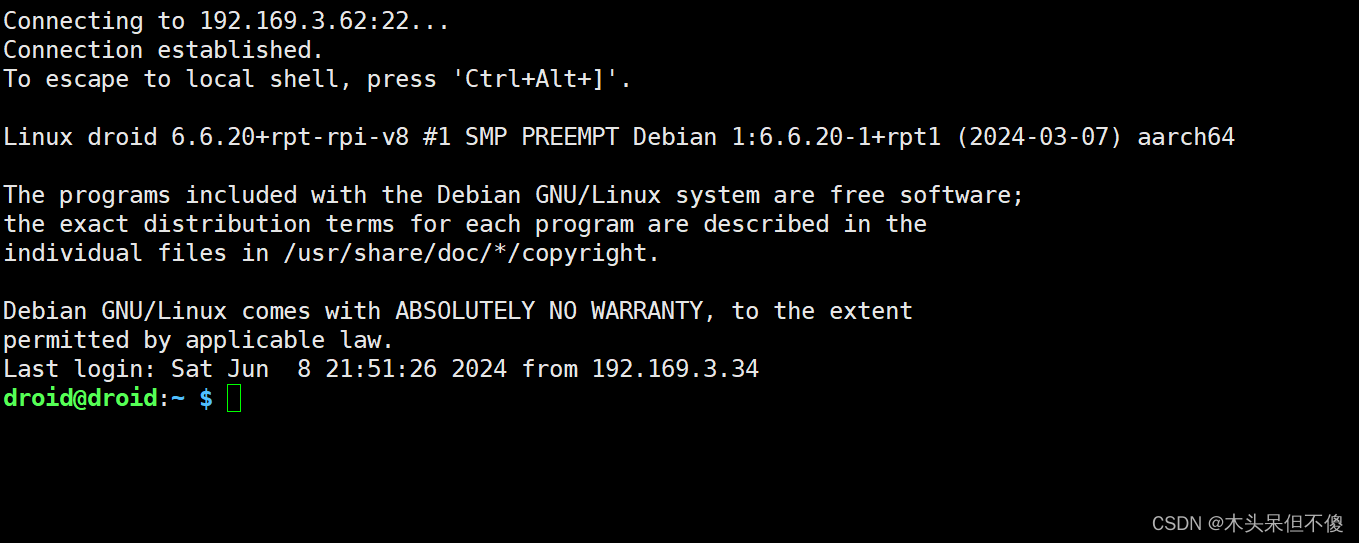
今日开始学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) TF卡系统盘烧录_初次启动_远程端连接配置 目录 格式化SD卡: 烧录系统Win32DiskImager: Raspberry Pi Imager镜像烧写: 树莓派官网资料: 树莓派4B 第一次启动: 然后连接wifi: SSH远程连接: 开启 SSH: 确认 SSH 服务已经启动: 检查 SSH 服务是否

树莓派4B安装opencv以及错误解决
欢迎访问我的博客:konosuba.xyz 更新于2020/4/27 更新:换了个树莓派4B,安装opencv的时候遇到了一些之前没碰到的问题,在这里记录一下 主要参考opencv官网文档和博客树莓派+Opencv(一)图像处理 树莓派4B上安装参考:树莓派4B 安装opencv完整教程基于python3(各种错误解决) 下载安装依赖项 sudo apt-get install b
上位机图像处理和嵌入式模块部署(树莓派4b的提高版)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 目前人工智能非常火,但是人工智能需要极高的算力和海量的数据,因此相关的关联公司非常吃香,nvidia就是提供算力的一家公司。大家都知道,nvidia的游戏显卡非常厉害,但是大家不了解的是,nvidia的嵌入式开发板jetson系列也非常不错。至少从性能上说,jetson系列
树莓派 4B putty远程连接登录显示拒绝访问,密码修改
putty显示拒绝访问 可能是树莓派的ip没有找到正确的 在下载系统镜像的时候,会提示设置wifi 这里设置的WiFi和密码需记住,主机名也需记住 可以在手机打开热点(将热点的账号和密码改为跟你设置的wifi一样的) 可以在手机后台查看设备连接,查找是否有树莓派的主机名,记住其mac地址 电脑也连接树莓派所设置的WiFi 使用ip查询工具Advanced IP Scanner –
上位机图像处理和嵌入式模块部署(树莓派4b和进程监控)
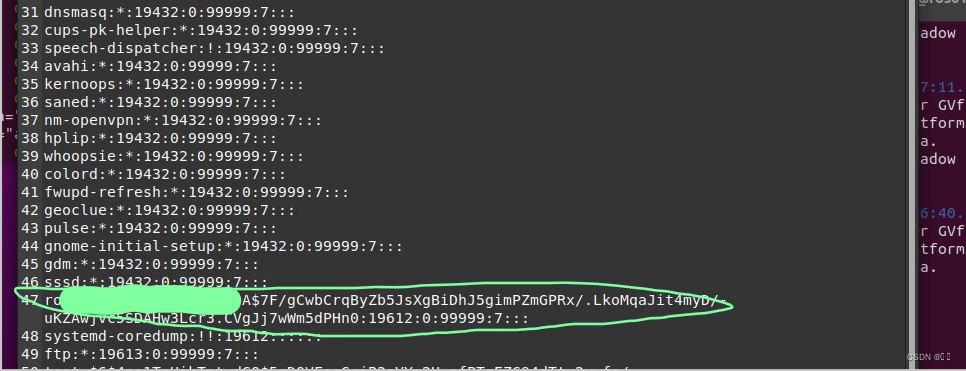
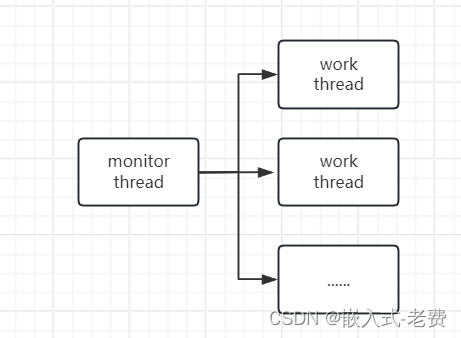
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 虽然软件开发的时候,我们总是希望软件不要发生bug、不要有闪退、甚至于说不要有内存泄漏,但这也只是我们自己的一厢情愿而已。只要前方有需求,软件功能在不停地迭代和优化,那么就势必会引入新的bug,这是不可避免的。因此,以防万一,我们一般会在软件开发的时候编写一个关联的监控
【树莓派4B】如何用树莓派的串口发送数据给单片机
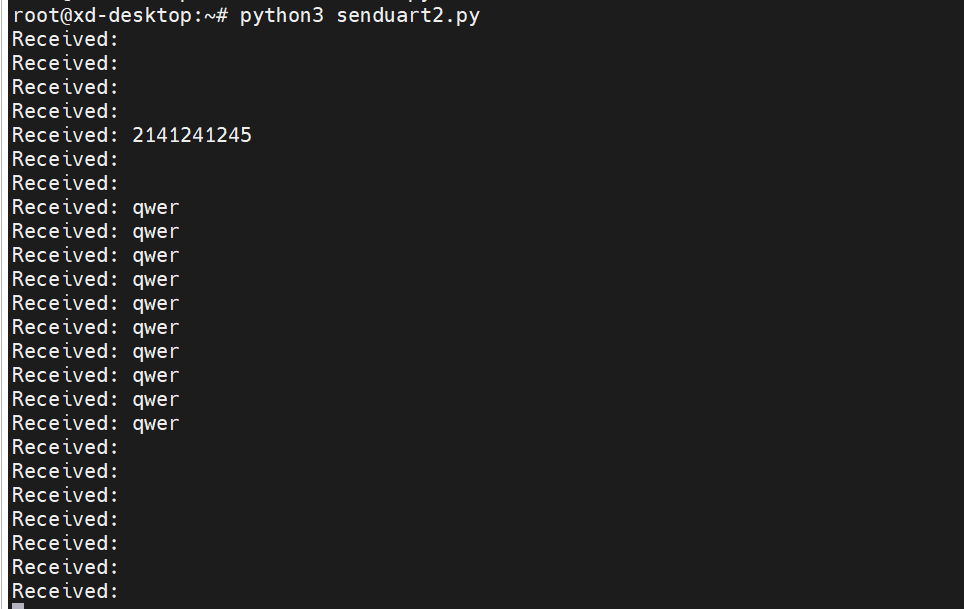
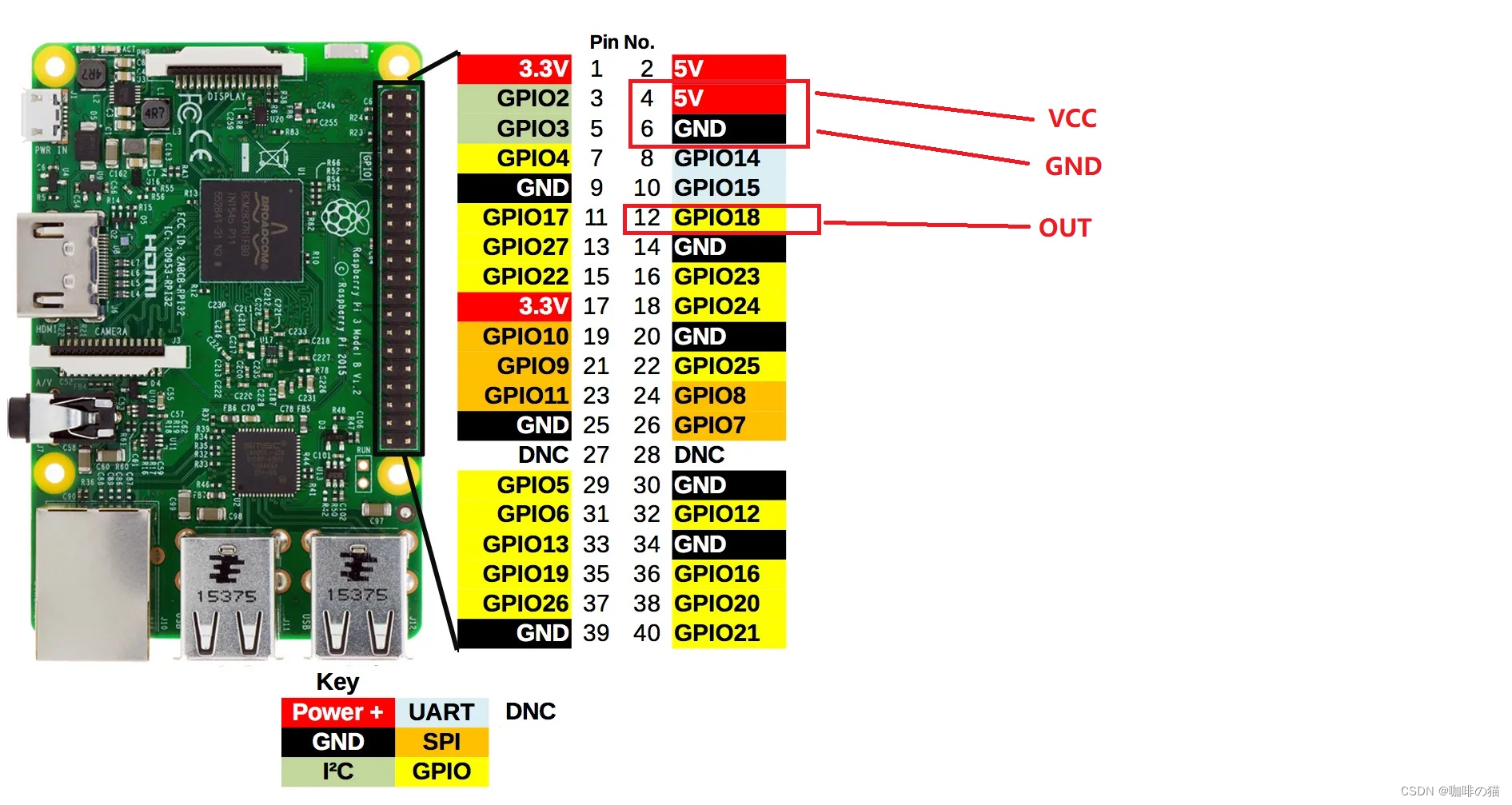
文章目录 查看路由器中的树莓派IProot连接打开vnc远程桌面服务打开win的远程桌面软件输入IP和端口串口发送数据硬件连接树莓派发送 查看路由器中的树莓派IP root连接 打开vnc远程桌面服务 vncserver :1 打开win的远程桌面软件 输入IP和端口 192.168.3.33:1 输入密码qwer1234后点连接 连接后:

上位机图像处理和嵌入式模块部署(树莓派4b镜像烧录经验总结)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 陆陆续续也烧录了好多次树莓派的镜像了,这里面有的时候很快,有的时候很慢。特别是烧录慢的时候,也不知道是自己配置的不对,还是tf卡坏掉了,又或者是网络比较差。总之一旦进展不如人意,总是会患得患失,把人搞得很焦躁不安,短则耽误一两个小时,多则耽误一两天,实在是不划算。这次根据自