本文主要是介绍【附带源码】机械臂MoveIt2极简教程(二)、move_group交互,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
文章目录
- 系列文章目录
- 一、MoveGroup是什么?
- 二、实现效果
- 1. 加载机械臂
- 2. 轨迹规划、导航
- 3. 运动过程罗列
- 三、几个常见术语
- 四、简要解读代码
- 1. 基本设置
- 2. 可视化
- 3. 获取基本信息
- 4. 运动过程解释
- 单点轨迹规划
- 可视化轨迹路径
- 单点导航
- 关节空间规划
- 路径约束
- 强制关节空间规划
- 笛卡尔空间轨迹规划
- 环境中添加障碍物
- 携带物体的末端执行器
- 移除所有障碍物和夹爪下的物体
- 五、完整代码
完成上一节的MoveIt2安装之后,大家也进行了demo演示,对MoveIt2有了初步了解。这一节通过C++包装的软件接口,实现机械臂完成更有意思的运动路径。

一、MoveGroup是什么?
在MoveIt中,最简单的交互接口就是通过调用MoveGroupInterface类来实现的。它为大多数机械臂操作提供了最简单的使用功能,比如在设置关节位置点或者目标点后,想要用机械臂抓取东西;在现实环境中增加障碍物,让机械臂能绕障运动等等。这些都可以通过MoveGroup类中实现的ros node节点来完成。
二、实现效果
首先咱们本节的实现效果,心中有了效果图,再回头看代码,更加能够理解其中含义,也不会枯燥。
1. 加载机械臂
打开两个terminal
第一个terminal输入
ros2 launch moveit2_tutorials move_group.launch.py
另一个terminal输入
ros2 launch moveit2_tutorials move_group_interface_tutorial.launch.py
之后出现rviz界面,如下图所示
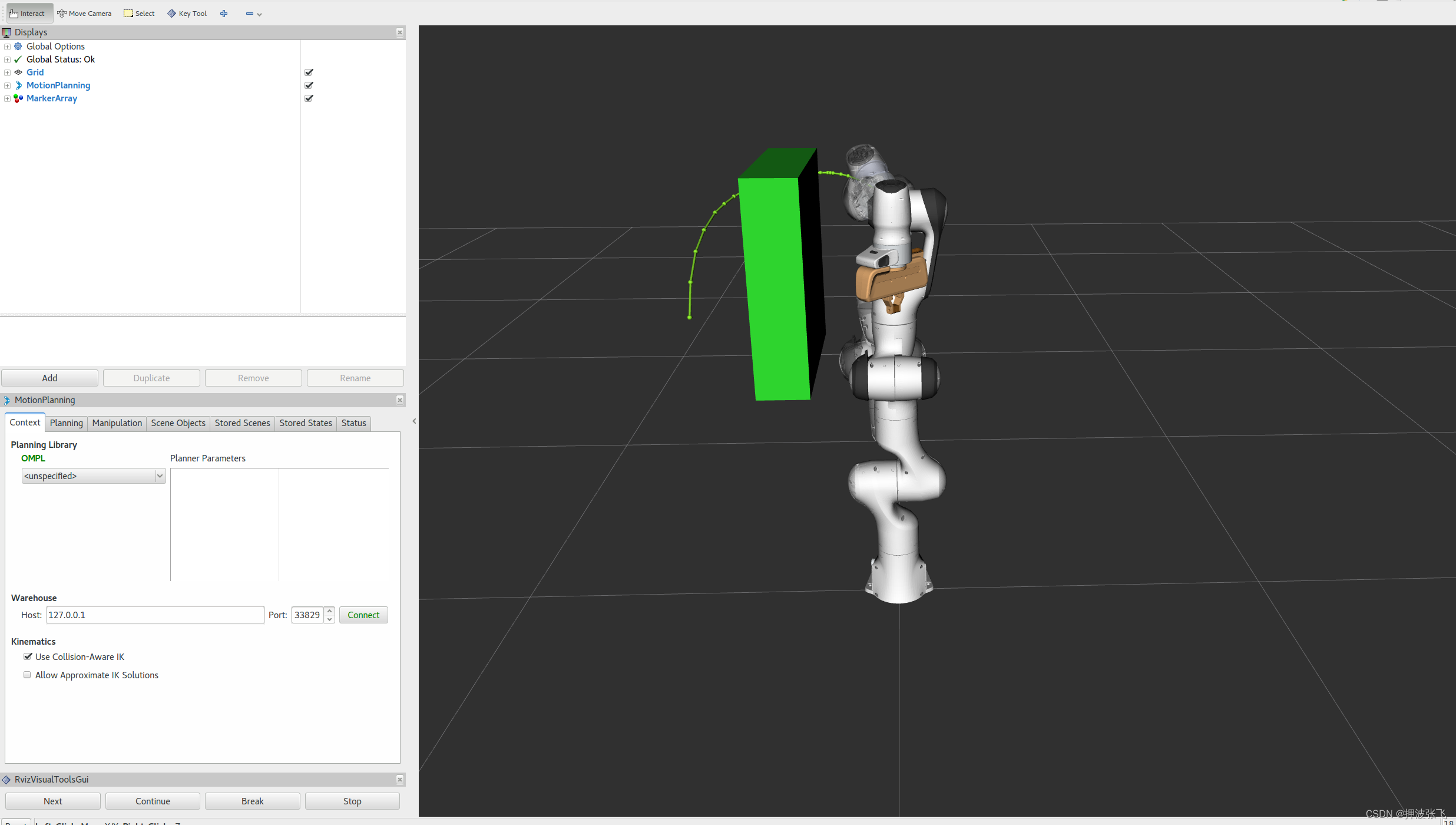
2. 轨迹规划、导航
想要让机械臂运动起来,有两种方法:
- 使用Key Tool工具:在rviz中的第二行工具栏点击+号,添加Key Tool工具;点击Key Tool,键盘按0即可让机械臂执行绕障运动等等动作。可以连续点击。
- 使用RvizVisualToolsGui面板:点击next按钮同样可以实现机械臂运动。可以连续点击。





3. 运动过程罗列
一共有10个运动过程:
- 移动机械臂末端移动到它前方目标点;
- 移动机械臂末端移动到它侧边目标点;
- 移动机械臂末端移动到后方的目标点,同时保持末端执行水平;
- 移动机械臂末端沿着笛卡尔路径运动(下、右、斜左上);
- 移动机械臂末端移动到前方某一个目标点(中间无障碍物);
- 添加一个隔板障碍物;
- 机械臂越过隔板,避障到达目标点;
- 机械臂末端执行器下方携带一个紫色圆柱体的物体(模拟运输物体);
- 机械臂带着圆柱体从侧身越过隔板障碍物,到达目标点(模拟运输物体过程的避障);
- 移除圆柱体;
- 移除隔板障碍物;
三、几个常见术语
在看代码之前,我们有必要进行常见术语的简要描述。既然这个系列是姨妈级呵护的教程,那么术语的解释也要通俗易懂。
- 末端执行器: 就是夹爪,哈哈哈哈
- 轨迹规划
可能你会说,轨迹规划我早就知道,不就是在当前位置和目标位置之间撒一些路径轨迹点吗?事实确实如此,但是机械臂的轨迹规划与机器人移动小车的轨迹规划有区别。
机械臂的轨迹规划是要把末端执行器位姿分解到每个关节的位姿变换。可以这样理解,以你的手臂举例,如果你想要一拳打在你前方的人脸上,拳头怎么到达是由你肩部关节、肘部关节、手腕关节联合运动的合力。拳头就是你的末端执行器。
-
关节空间规划与笛卡尔空间规划
关节空间规划: 通过确定各个关节的转角,并组合成一个序列,才能完成末端执行器的轨迹规划。优点:计算简单,只要计算每个关节转角即可。缺点:末端控制不够精确。
笛卡尔空间规划: 通过末端执行器的位姿,在起点和终点之间撒轨迹点,对每个轨迹点利用逆运动学分解得到每个关节的转角。最后会得到一系列的关节转角序列。优点:精确控制,避障。缺点:逆运动学计算复杂,同时轨迹要插值,增加计算量。
笛卡尔空间规划其实和移动机器人的基于运动的路径规划算法大致相似(在不考虑机械臂关节转角的前提下),都是先来一个全局路径,在撒点,根据每个点进行一个局部路径规划。现在流行的特斯拉基于大模型的端到端轨迹规划导航则是另一种方法,没有全局路径和局部路径的分类。这是后话。
四、简要解读代码
代码位于moveit2_tutorials包的/doc/move_group_interface/src/move_group_interface_tutorial.cpp中。github源码链接
1. 基本设置
这些是ros2相关的初始化,与moveit2无关:
rclcpp::init(argc, argv);
rclcpp::NodeOptions node_options;
node_options.automatically_declare_parameters_from_overrides(true);
auto move_group_node = rclcpp::Node::make_shared("move_group_interface_tutorial", node_options);
moveit会在一系列的关节上进行操作,统称planning groups,存储在一个JointModelGroup的实例中。
static const std::string PLANNING_GROUP = "panda_arm";
一旦你设置了planning group的名字,那么MoveGroupInterface类就会进行绑定,之后你所有的控制和规划都与它相关。
moveit::planning_interface::MoveGroupInterface move_group(move_group_node, PLANNING_GROUP);
PlanningSceneInterface类则是用来添加和移除障碍物。
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
JointModelGroup的指针会频繁地被用来指向planning group,这样可以大大提高执行机构的性能。
const moveit::core::JointModelGroup* joint_model_group =move_group.getCurrentState()->getJointModelGroup(PLANNING_GROUP);
2. 可视化
rviz提供了很多markers,这个例子中使用了文本、圆柱体、球体。
namespace rvt = rviz_visual_tools;
moveit_visual_tools::MoveItVisualTools visual_tools(move_group_node, "panda_link0", "move_group_tutorial",move_group.getRobotModel());visual_tools.deleteAllMarkers();/* Remote control is an introspection tool that allows users to step through a high level script */
/* via buttons and keyboard shortcuts in RViz */
visual_tools.loadRemoteControl();
Eigen::Isometry3d text_pose = Eigen::Isometry3d::Identity();
text_pose.translation().z() = 1.0;
visual_tools.publishText(text_pose, "MoveGroupInterface_Demo", rvt::WHITE, rvt::XLARGE);
为了提高发给rviz的大数据量的传输速率,moveit可视化工具进行了优化传输:
visual_tools.trigger();
3. 获取基本信息
打印机械臂参考系的名字
RCLCPP_INFO(LOGGER, "Planning frame: %s", move_group.getPlanningFrame().c_str());
打印规划组planning group的末端执行器的名字
RCLCPP_INFO(LOGGER, "End effector link: %s", move_group.getEndEffectorLink().c_str());
获取机械臂所有的规划组名字
RCLCPP_INFO(LOGGER, "Available Planning Groups:");
std::copy(move_group.getJointModelGroupNames().begin(), move_group.getJointModelGroupNames().end(),std::ostream_iterator<std::string>(std::cout, ", "));
4. 运动过程解释
单点轨迹规划
为末端执行器规划一个合适的位姿,
geometry_msgs::msg::Pose target_pose1;
target_pose1.orientation.w = 1.0;
target_pose1.position.x = 0.28;
target_pose1.position.y = -0.2;
target_pose1.position.z = 0.5;
move_group.setPoseTarget(target_pose1);
调用规划器来生成轨迹,并可视化显示。注意现在仅仅是规划,没有进行导航移动
moveit::planning_interface::MoveGroupInterface::Plan my_plan;bool success = (move_group.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS);RCLCPP_INFO(LOGGER, "Visualizing plan 1 (pose goal) %s", success ? "" : "FAILED");
可视化轨迹路径
RCLCPP_INFO(LOGGER, "Visualizing plan 1 as trajectory line");
visual_tools.publishAxisLabeled(target_pose1, "pose1");
visual_tools.publishText(text_pose, "Pose_Goal", rvt::WHITE, rvt::XLARGE);
visual_tools.publishTrajectoryLine(my_plan.trajectory, joint_model_group);
visual_tools.trigger();
visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo");
单点导航
现实中的本体机械臂在规划完路径之后直接执行move_group.move()即可,但是仿真不能这么用。因为这个函数是个阻塞函数,必须得到控制器的成功返回指令,否则一直堵塞。
关节空间规划
一开始,创建一个指针指向当前机械臂的位姿状态。机械臂状态包括所有当前的位姿、速度、加速度等
moveit::core::RobotStatePtr current_state = move_group.getCurrentState(10);
之后,获得当前关节组的所有关节值
std::vector<double> joint_group_positions;
current_state->copyJointGroupPositions(joint_model_group, joint_group_positions);
修改其中一个关节值,规划新的关节空间路径,可视化路径
joint_group_positions[0] = -1.0; // radians
bool within_bounds = move_group.setJointValueTarget(joint_group_positions);
if (!within_bounds)
{RCLCPP_WARN(LOGGER, "Target joint position(s) were outside of limits, but we will plan and clamp to the limits ");
}
把速度和加速度都调低一点。默认值是0.1(最大值的10%)
这些配置都在moveit_config中的joint_limits.yaml中
move_group.setMaxVelocityScalingFactor(0.05);
move_group.setMaxAccelerationScalingFactor(0.05);success = (move_group.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS);
RCLCPP_INFO(LOGGER, "Visualizing plan 2 (joint space goal) %s", success ? "" : "FAILED");
可视化:
visual_tools.deleteAllMarkers();
visual_tools.publishText(text_pose, "Joint_Space_Goal", rvt::WHITE, rvt::XLARGE);
visual_tools.publishTrajectoryLine(my_plan.trajectory, joint_model_group);
visual_tools.trigger();
visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo");
路径约束
只要对某一个目标点的位姿添加路径约束即可,然后跟move_group绑定。定向路径约束的轨迹规划通常是在笛卡尔空间中进行采样。
moveit_msgs::msg::OrientationConstraint ocm;
ocm.link_name = "panda_link7";
ocm.header.frame_id = "panda_link0";
ocm.orientation.w = 1.0;
ocm.absolute_x_axis_tolerance = 0.1;
ocm.absolute_y_axis_tolerance = 0.1;
ocm.absolute_z_axis_tolerance = 0.1;
ocm.weight = 1.0;moveit_msgs::msg::Constraints test_constraints;
test_constraints.orientation_constraints.push_back(ocm);
move_group.setPathConstraints(test_constraints);
强制关节空间规划
MoveIt会根据实际问题自动选择关节空间规划还是笛卡尔空间规划。如果你想强制使用关节空间规划,那么需要在ompl_planning.yaml中修改参数enforce_joint_model_state_space,设为true。
设置开始状态
moveit::core::RobotState start_state(*move_group.getCurrentState());
geometry_msgs::msg::Pose start_pose2;
start_pose2.orientation.w = 1.0;
start_pose2.position.x = 0.55;
start_pose2.position.y = -0.05;
start_pose2.position.z = 0.8;
start_state.setFromIK(joint_model_group, start_pose2);
move_group.这篇关于【附带源码】机械臂MoveIt2极简教程(二)、move_group交互的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








