本文主要是介绍最简单的针孔相机模型标定方法,使用Matlab进行快速可视化相机标定,小白专用,超详细,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
相机标定是机器视觉、SLAM等绕不开的环节,今天介绍一种最为简单的可视化标定方法。
这篇文章只是讲解如果标定,关于相机的标定原理,可以参考别的文章,这里推荐一篇《【机器视觉】张氏法相机标定》
一. 准备工作
- 方格标定板一块(实际上没有也行);
- 已经安装Matlab的电脑一台(Matlab最低版本要求是R2013b,推荐使用最新版本R2019b);
注意:
1.如果你有正版Matlab账号,或者你是学生,你可以使用网页版的Matlab;
2.如果你电脑上没有Matlab,而且你也没有正版账号,那么你可以选择这个网站提供的云端Matlab,你只需要免费注册个账号,然后将图片上传云端就可以按照如下方法进行标定。
二. 开始标定
1.第一步 打印标定板
如果你还没有标定,那么你需要打印一块标定板出来,但是你放心,准备标定板的过程是非常简单的。你先将我提供的标定板图片下载——下载标定板(提取码:5yun),然后打印出来,只要你保持图片的横纵比,打印成任何尺寸都可以,我推荐打印在A4纸上(如果你不方便打印,其实你也可以直接下载下来显示在电脑屏幕上也是一样的,也不需要固定大小,只要横纵比不变就行)。打印之后的样式,如下图:
2. 拍摄包含标定板的图片
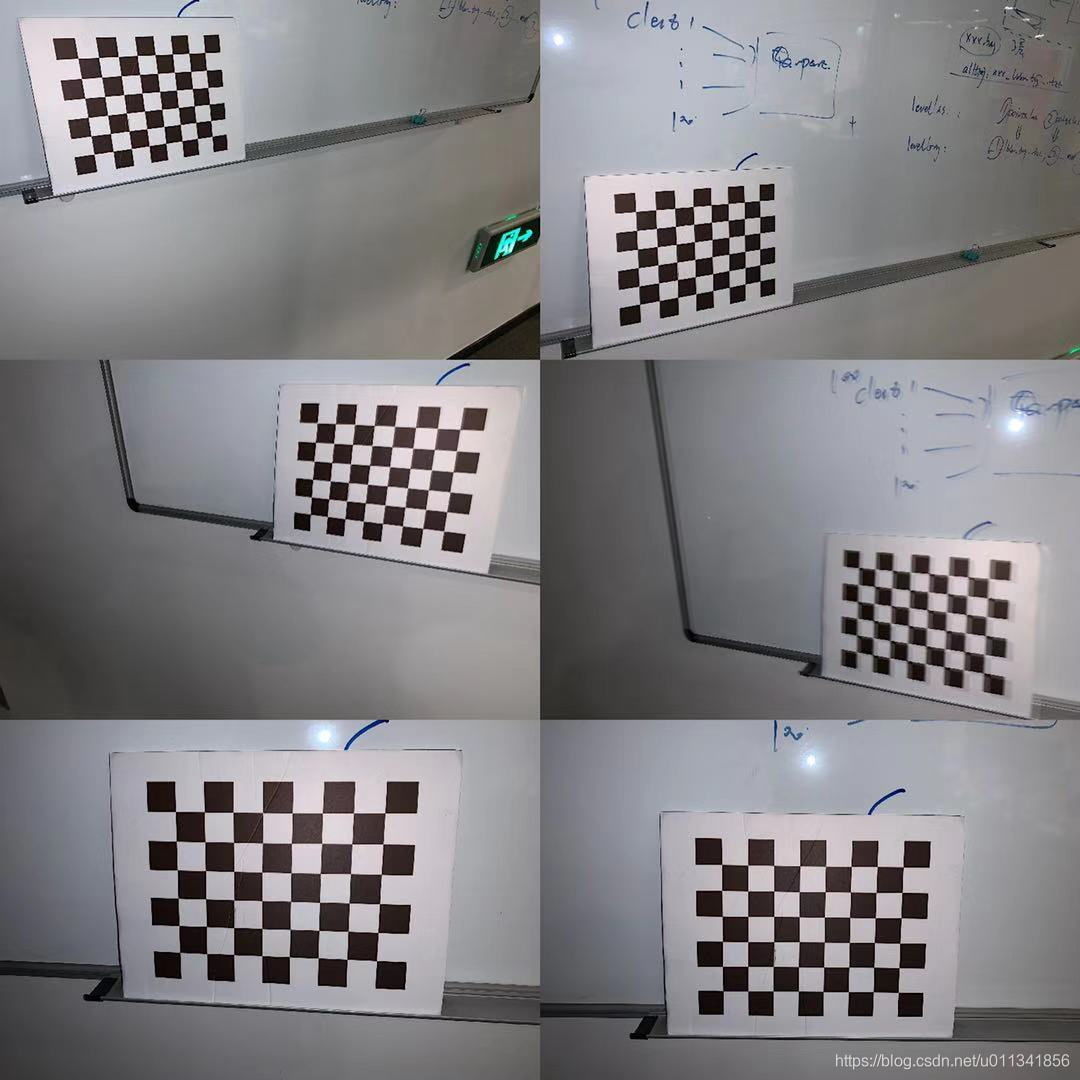
使用将要被标定的相机,拍摄一些包含标定板的照片,根据我的经验20到30张图片已经够了。当然图片越多结果也会越准确,但是会多用一些时间。拍摄图片的技巧是,要多个角度大范围的去拍摄标定板,让它成像在你相机屏幕的各个地方,大家可以参考我下面的拍摄方式。
注意: 拍摄照片时有几点需要注意:标定板的摆放没有要求,横竖都行。但是拍照片时对相机的姿态有要求,你相机如果是最终横着使用,那么拍照片时相机也要横着拍。至于这里面的原因,可以参考我的另外一篇博客:《相机内参fx,fy,cx,cy的方向问题!》
3. 使用Matlab进行相机内参数标定
① 打开已经安装好的Matlab软件,菜单栏中依次点击 App -> Camera Calibrator,如下图: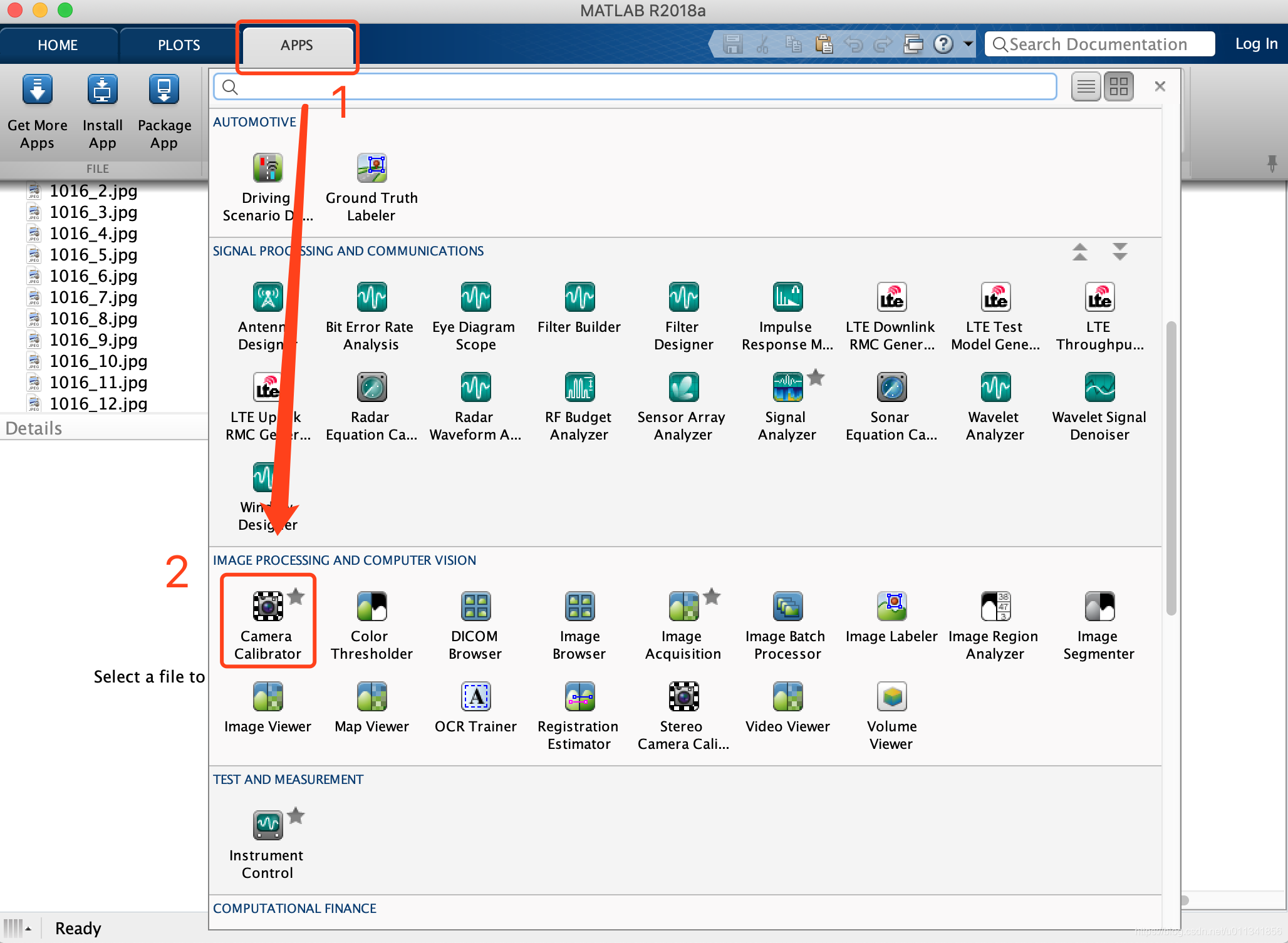
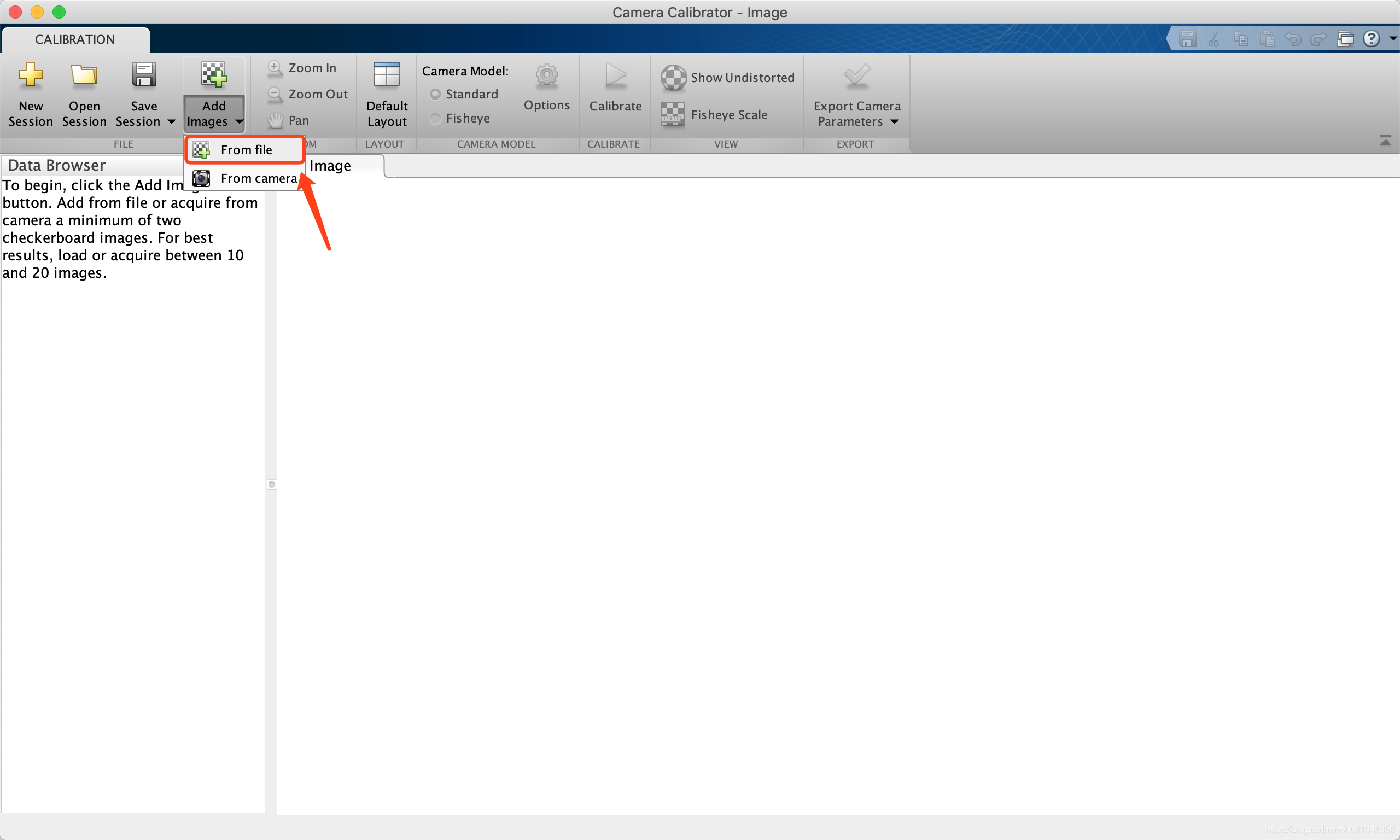
②在打开的Camera Calibrator工具中,依次点击Add Image -> From File,如下图:
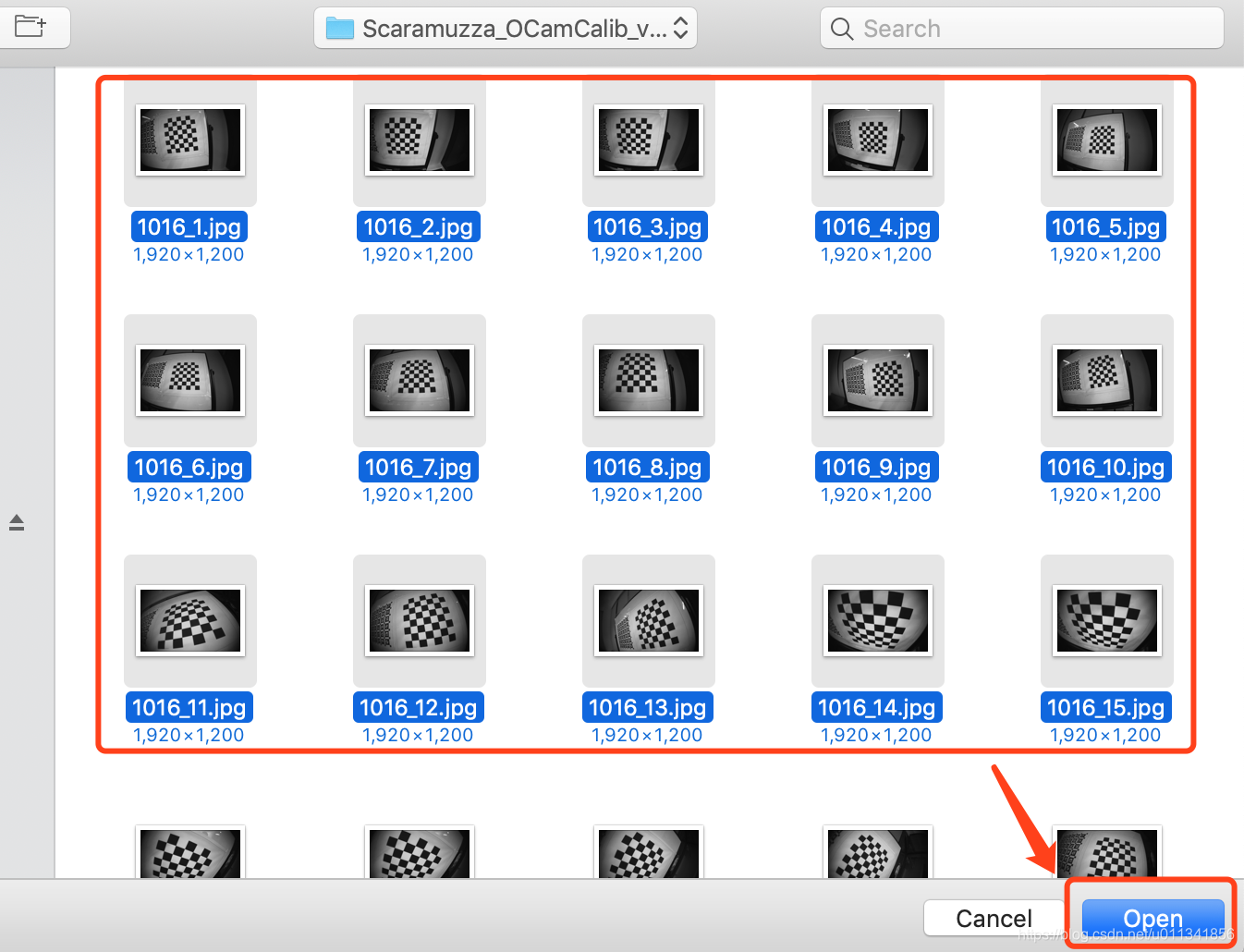
③然后选择你刚刚已经拍摄好的照片,点击Open按钮,如下图:
④弹出的Checkboard Square Size窗口中,直接点击OK按钮,如下图:
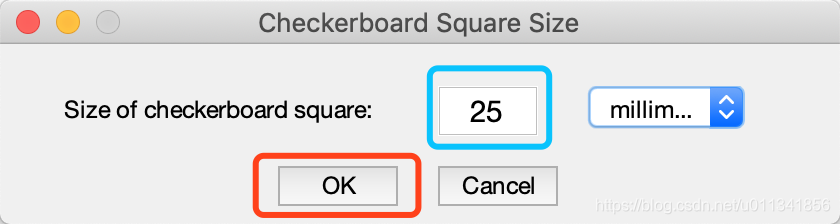
注意:蓝色框中的数字是标定板一个小方格的边长,这里不用管它,数值对最终的标定结果影响不大。
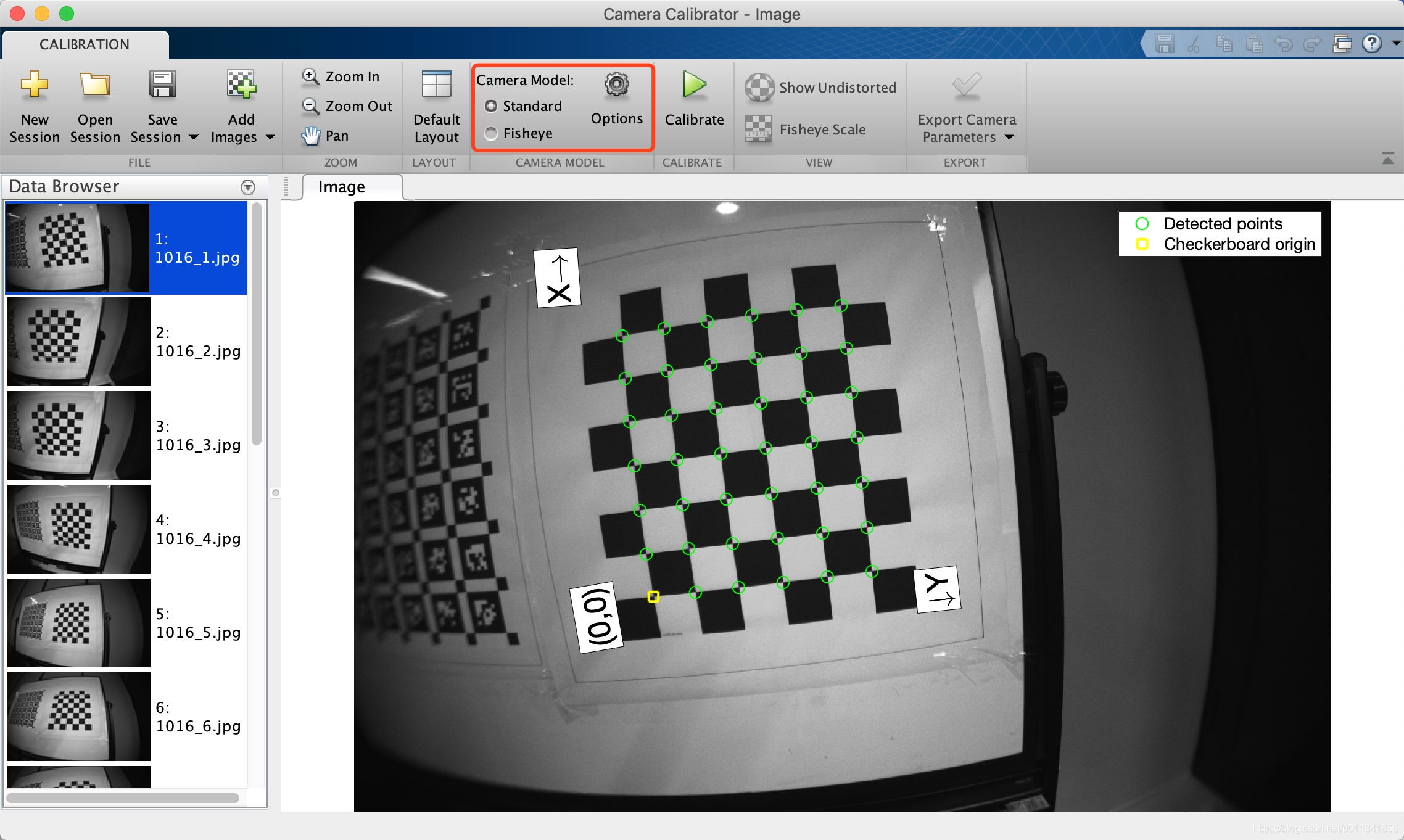
⑤ 选择相机模型,如果你使用的是普通的针孔相机模型,请选择Standard,如果是鱼眼相机,就选择Fisheye,如下图:
⑥ 然后选择需要标定的参数。点击Options选择想要的畸变参数形式,然后点击,Calibrate按钮开始标定,如下图:
注意: 在畸变参数中,径向畸变是默认勾选2 Coefficients,也就是说径向畸变只使用两个系数,如果你不是很明白其中的道理,那你就用默认状态;切向畸变是可选择的,如果你需要切向畸变,请勾选Tangential Distortior;skew很少用到,它表示的是是单个像素x,y轴方向的夹角系数。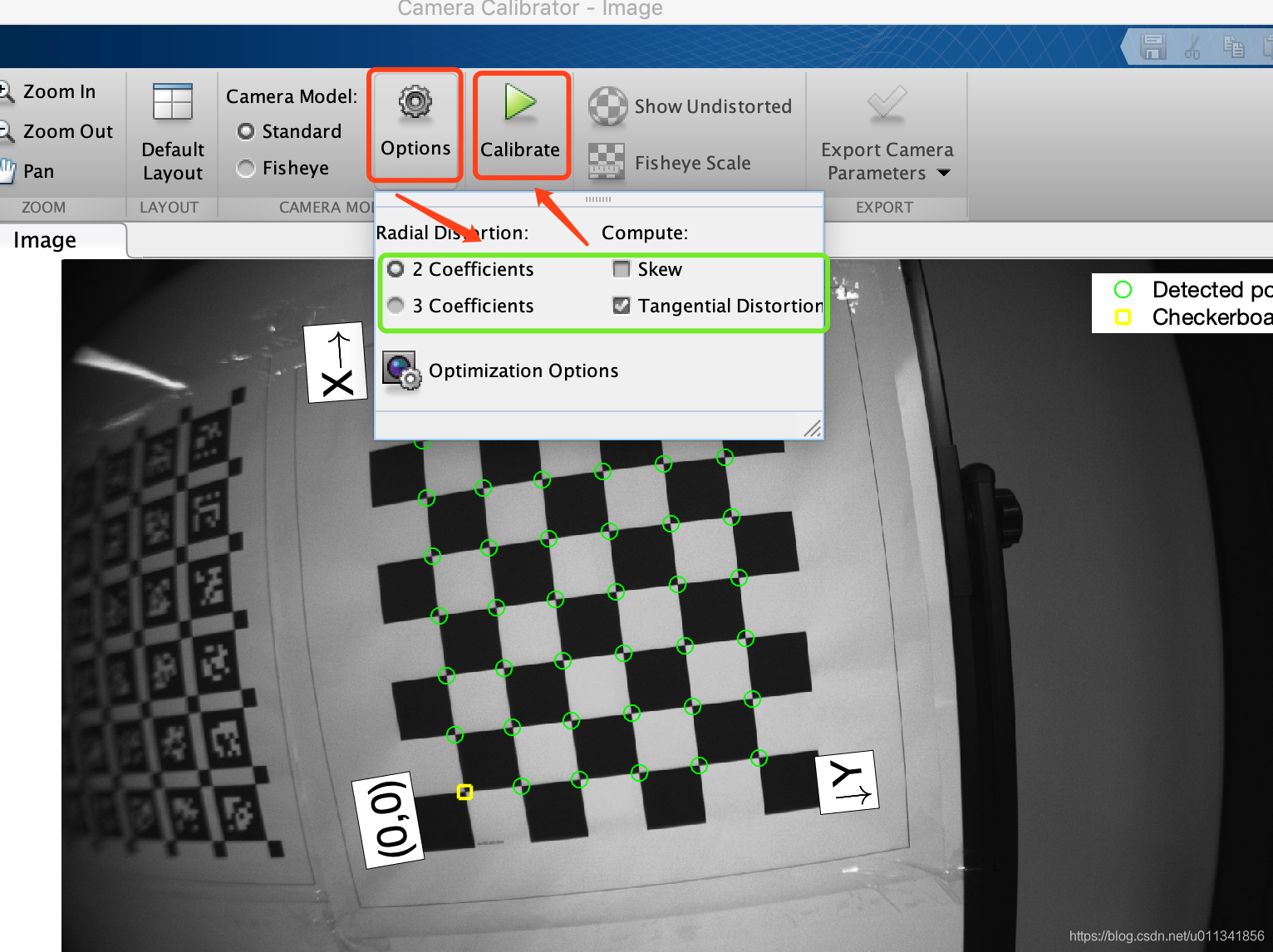
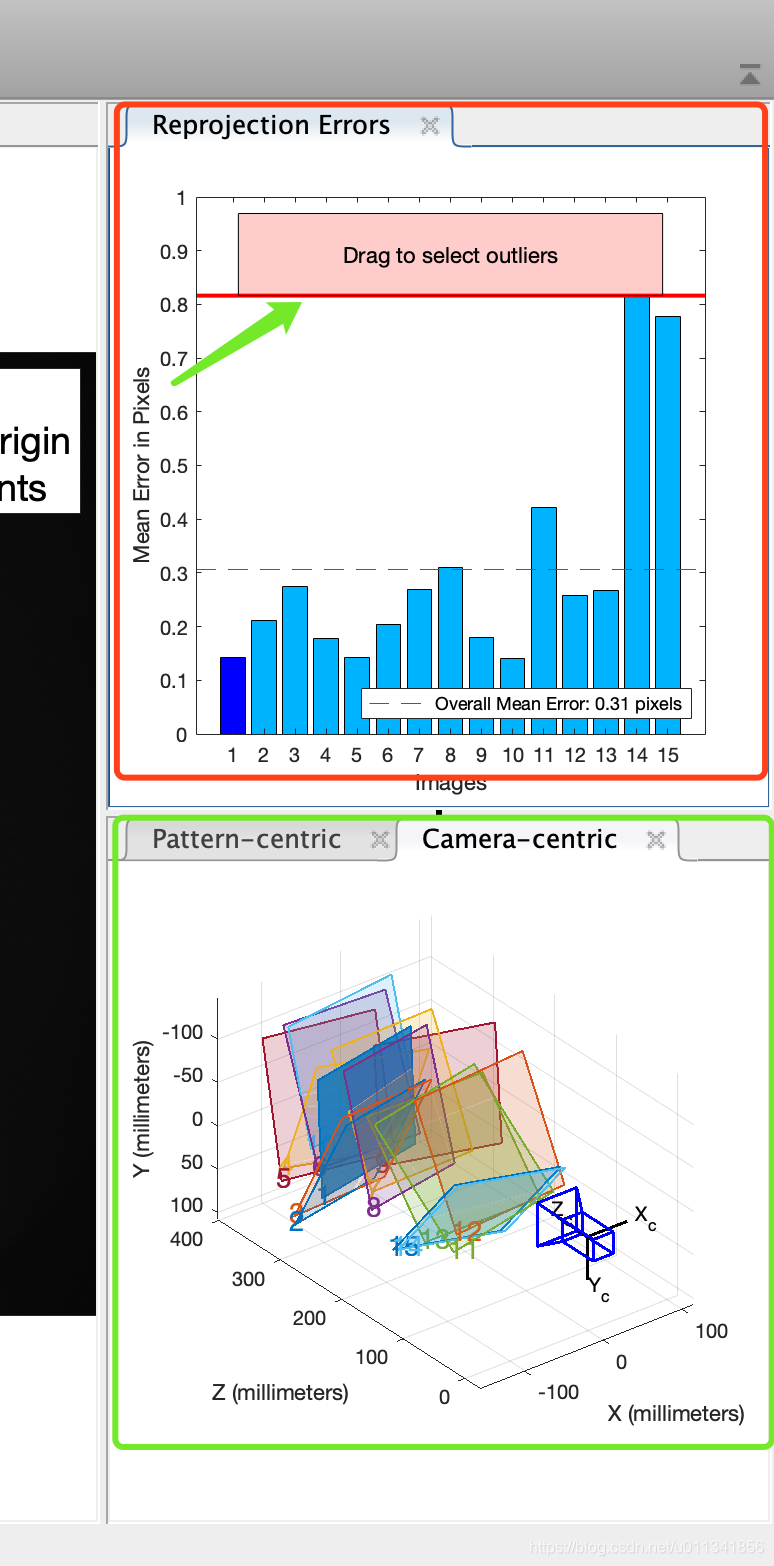
⑦ 稍等一会,就能看到标定工具界面发生了变化,右边多出来两个窗口,红框中表示的是每一张图片投影产生的误差是几个像素,横坐标是图片的序号,纵坐标是误差。绿色框中表示的是通过照片还原得到的拍摄角度。
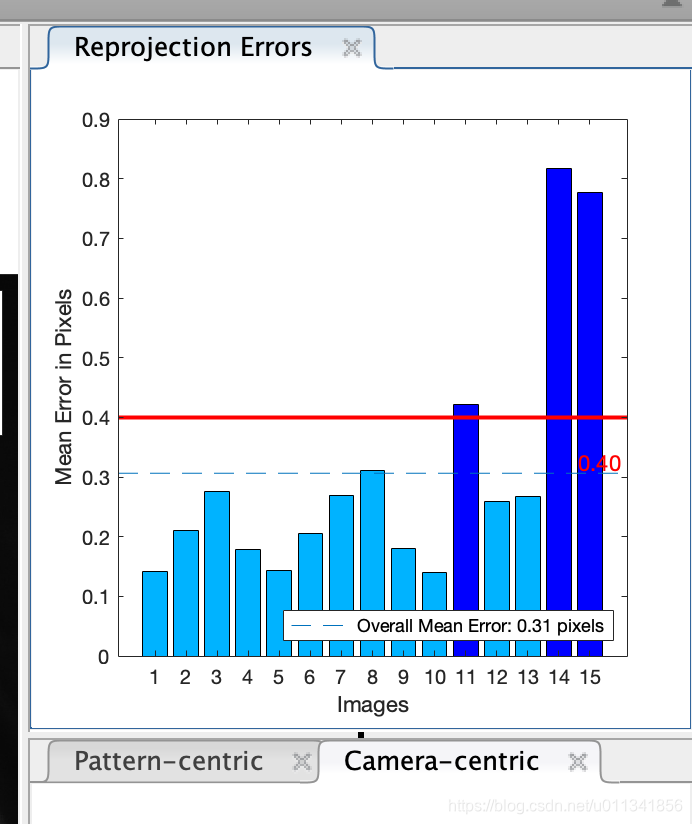
⑧ 鼠标点击红框中图标上的红线,将它往下拉,拉到0.8以内就可以了,那些误差大的照片就会被选中,如下图:
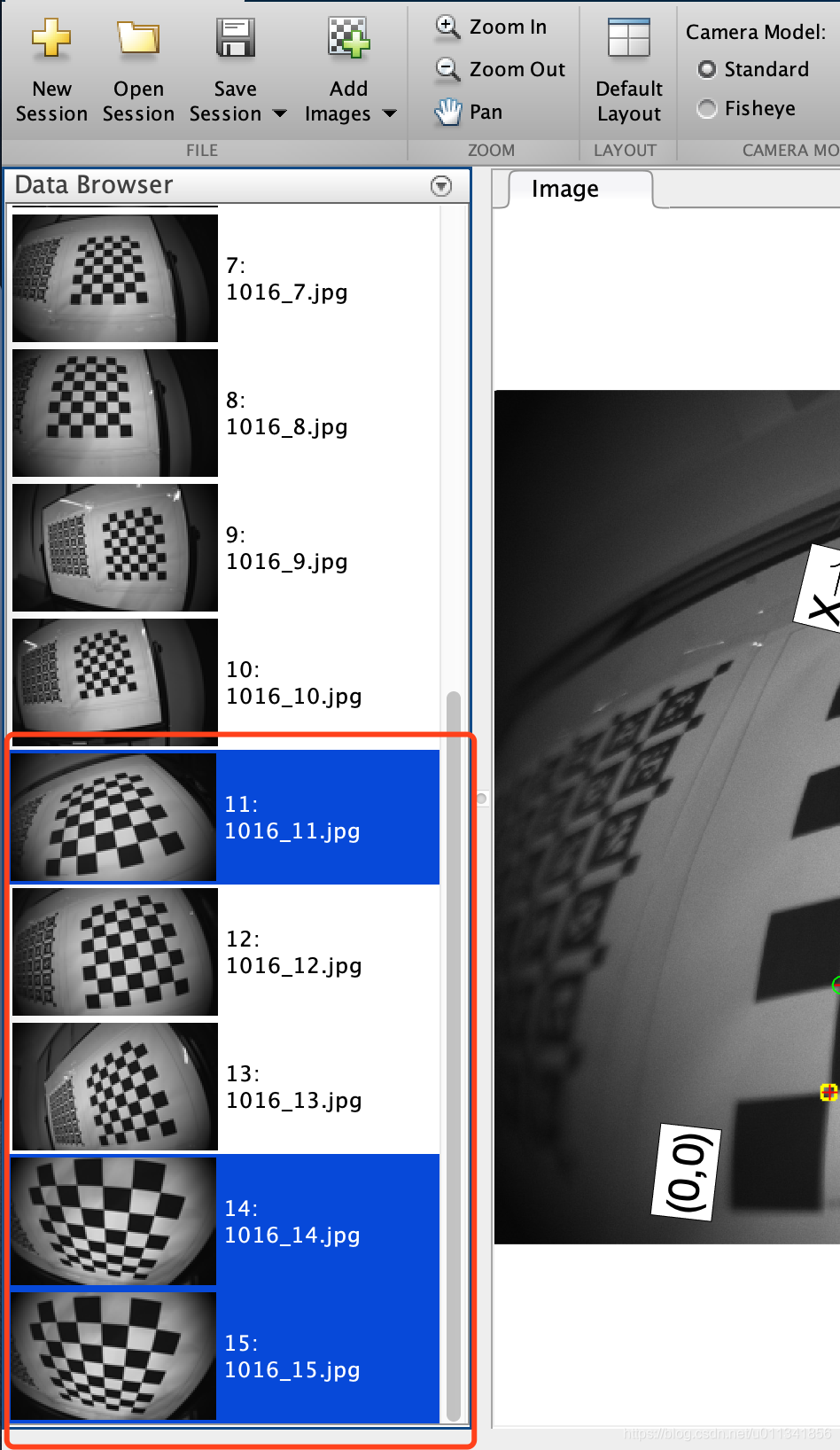
⑨ 上一步拉动红线被选中的图片,会在标定工具左侧窗口中选中,蓝色状态的图片就是误差较大的图片,如下图:
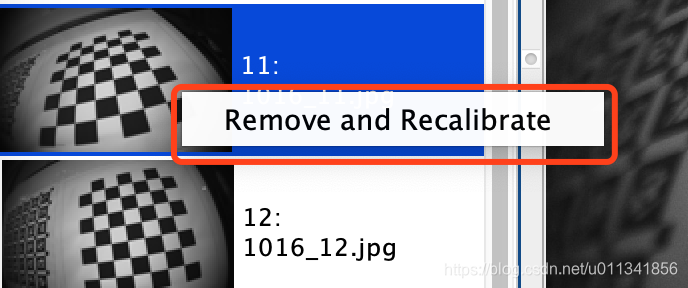
⑩ 在任意一张被选中的图片上,单击右键,选择Remove and Recalibrate删掉这些图片,然后就会自动重新标定,如下图:
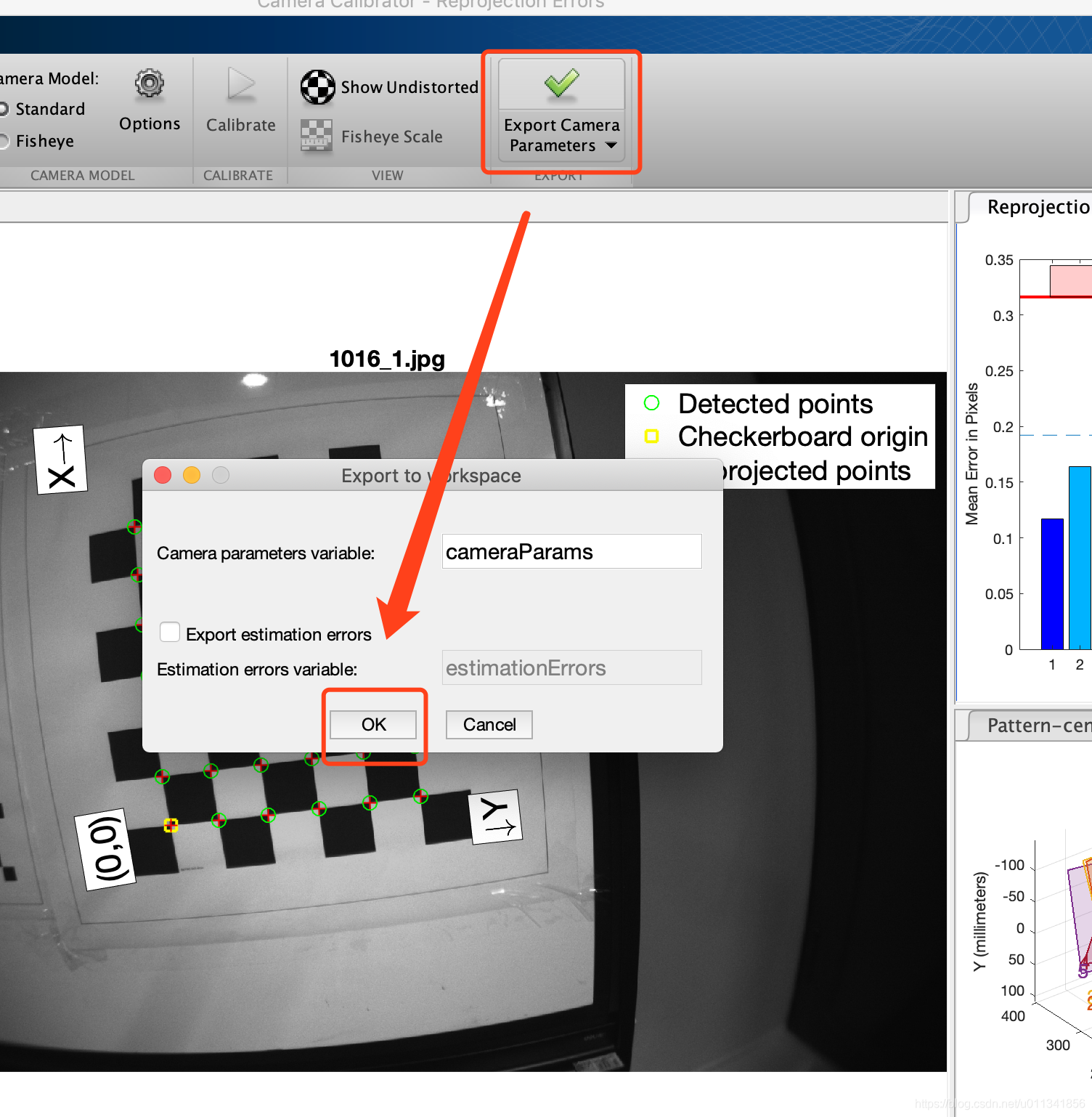
⑪等待标定完成之后,依次点击Export Camera Parameters -> OK,将标定结果输出到Matlab命令行中,如下图:
⑫关闭相机标定工具页面,在Matlab主界面命令行中,可以看到最终的标定结果,如下图:

三. 参数介绍:
相机的内参矩阵:
K = [ f x 0 c x 0 f y c y 0 0 1 ] K = \left[ \begin{matrix}f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{matrix} \right] K=⎣⎡fx000fy0cxcy1⎦⎤其中 FocalLength分别对应 f x fx fx和 f y f_y fy
PrincipalPoint:分别对应 c x c_x cx和 c y c_y cy
相机的径向畸变公式: x d i s t o r t e d = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) x_{distorted}=x(1+k_1r^2+k_2r^4+k_3r^6) xdistorted=x(1+k1r2+k2r4+k3r6) y d i s t o r t e d = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) y_{distorted}=y(1+k_1r^2+k_2r^4+k_3r^6) ydistorted=y(1+k1r2+k2r4+k3r6)其中RadialDistortion分别对应 k 1 k_1 k1和 k 2 k_2 k2
相机的切向畸变公式: x d i s t o r t e d = x + 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) x_{distorted} = x+2p_1xy+p_2(r^2+2x^2) xdistorted=x+2p1xy+p2(r2+2x2) y d i s t o r t e d = y + p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y y_{distorted} = y+p_1(r^2+2y^2)+2p_2xy ydistorted=y+p1(r2+2y2)+2p2xy其中TangentialDistortion分别对应 p 1 p_1 p1和 p 2 p_2 p2
这篇关于最简单的针孔相机模型标定方法,使用Matlab进行快速可视化相机标定,小白专用,超详细的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




