针孔专题

最简单的针孔相机模型标定方法,使用Matlab进行快速可视化相机标定,小白专用,超详细
相机标定是机器视觉、SLAM等绕不开的环节,今天介绍一种最为简单的可视化标定方法。 这篇文章只是讲解如果标定,关于相机的标定原理,可以参考别的文章,这里推荐一篇《【机器视觉】张氏法相机标定》 一. 准备工作 方格标定板一块(实际上没有也行);已经安装Matlab的电脑一台(Matlab最低版本要求是R2013b,推荐使用最新版本R2019b); 注意: 1.如果你有正版Matlab
相机与相机模型(针孔/鱼眼/全景相机)
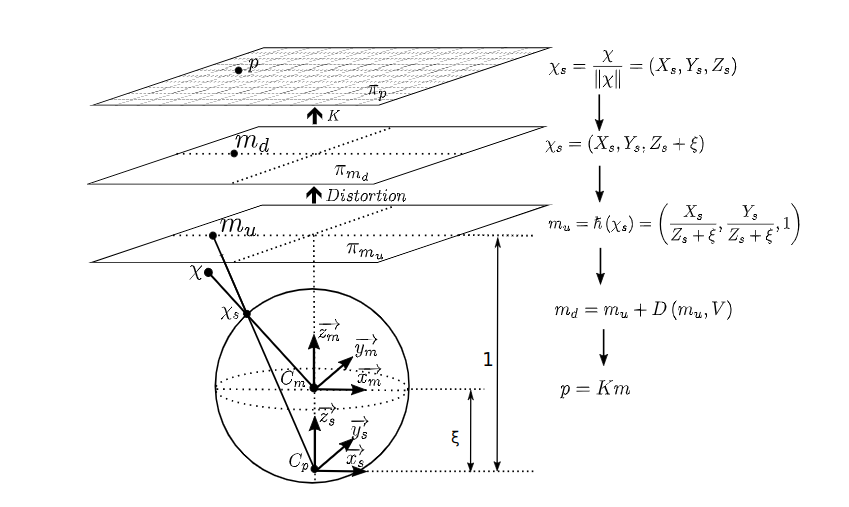
0. 摘要 本文旨在较为直观地介绍相机成像背后的数学模型,主要的章节组织如下: 第1章用最简单的针孔投影模型为例讲解一个三维点是如何映射到图像中的一个像素 第2章介绍除了针孔投影模型外其他一些经典投影模型,旨在让读者建立不同投影模型之间的建模过程 第3章介绍如何把不同的投影模型用一个统一的投影过程表达 第4章进一步补充第三章的统一投影模型,并介绍畸变的定义和去畸变的原理 第5章针对全

【计算机视觉中的多视图几何系列】深入浅出理解针孔相机模型
温故而知新,可以为师矣! 一、参考资料 《计算机视觉中的多视图几何-第五章》-Richard Hartley, Andrew Zisserman. 二、针孔模型相关介绍 1. 重要概念 1.1 投影中心/摄像机中心/光心 投影中心称为摄像机中心,也称为光心。投影中心位于一个欧式坐标系的原点。 1.2 图像平面/聚焦平面 平面 Z = f Z=f Z=f 被称为图像平面或聚焦平
【计算机视觉中的多视图几何系列】深入浅出理解针孔相机模型
温故而知新,可以为师矣! 一、参考资料 《计算机视觉中的多视图几何-第五章》-Richard Hartley, Andrew Zisserman. 二、针孔模型相关介绍 1. 重要概念 1.1 投影中心/摄像机中心/光心 投影中心称为摄像机中心,也称为光心。投影中心位于一个欧式坐标系的原点。 1.2 图像平面/聚焦平面 平面 Z = f Z=f Z=f 被称为图像平面或聚焦平

SLAM学习——相机模型(针孔+鱼眼)
针孔相机模型 针孔相机模型是很常用,而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的关系,基于针孔的投影过程可以通过针孔和畸变两个模型来描述。 模型中有四个坐标系,分别为world,camera,image,pixel world为世界坐标系,可以任意指定 x w x_w xw轴和 y w y_w yw轴,为上图P点所在坐标系。 camera为相机坐标系,原点位于小
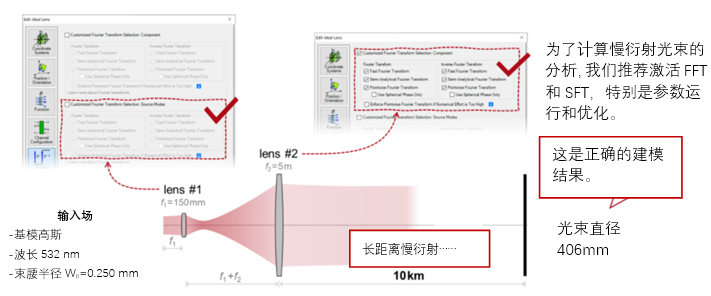
系统内针孔衍射的建模
正如M. Mout等人所说的,通常仅在系统的出射光瞳处考虑衍射效应。考虑系统内包含的衍射(特别是,当它由多个截断引起时),这是个具有挑战的任务。 借助创新的傅立叶变换,您可以直接灵活地控制VirtualLab Fusion 2020.1中的包含的衍射。 例如,我们演示了在低菲涅尔数系统内部对针孔以及表面孔径衍射效应的建模,并将结果与典型的出射光瞳衍射方法进行了比较。 低菲涅耳数系统中的针孔建