本文主要是介绍基于GraspNet熟悉点云抓取代码的处理逻辑,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于GraspNet熟悉点云抓取代码的处理逻辑
目录
- 基于GraspNet熟悉点云抓取代码的处理逻辑
- 1.数据读取逻辑
- 1.1GraspNet数据集的预览
- 1.2xxx
- 1.3get_item方法读取逻辑
- 1.4结合相机内参将depth转点云
- 1.5筛选有效的点云数据
- 1.5随机采样
1.数据读取逻辑
1.1GraspNet数据集的预览
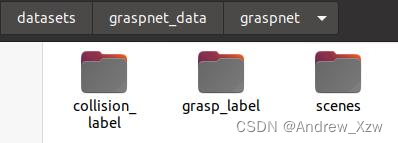
公开数据集下载完全如下,其中scenes为存放的数据集(RGB、D等),grasp_label为抓取的标签,collision_label为碰撞的标签。
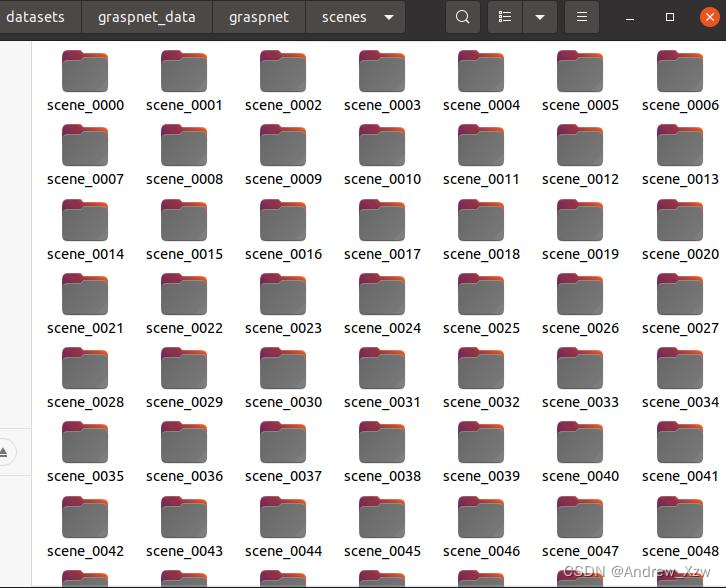
scenes中一共有100个场景的文件夹:
每个场景中的文件如下,根据指定相机的品牌,决定使用哪个文件夹。
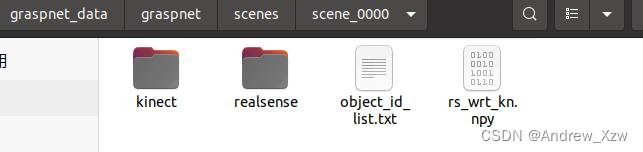
比如,我这里使用realsense相机,realsense文件夹里面存放的就是rgb、depth(深度)、label(mask)、meta(对应每一帧图片中物体的类别索引、物体的位置姿态、相机内参、深度图像中的像素值进行标准化或缩放的因子)等数据。

1.2xxx
1.3get_item方法读取逻辑
与我们常见的使用opencv读取RGB图不同,在点云处理中,常用PIL库以dtype=np.float32的形式读取RGB、D、mask,并对RGB进行/255.归一化操作。

这里RGB就是float32型,D就是int32型。
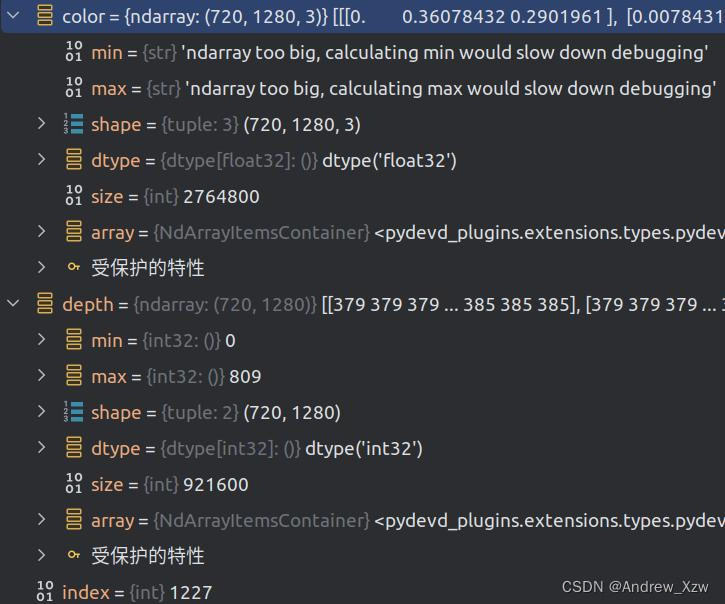
mask为uint8型。

随后。使用scipy库对.mat数据进行读取,分别获取对应每一帧图片中物体的类别索引、物体的位置姿态、相机内参、深度图像中的像素值进行标准化或缩放的因子。
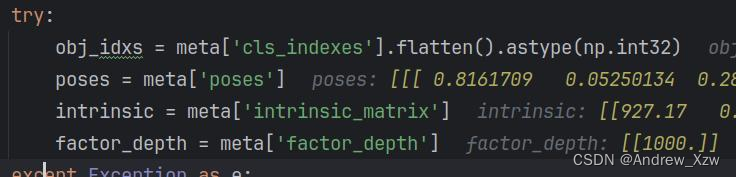
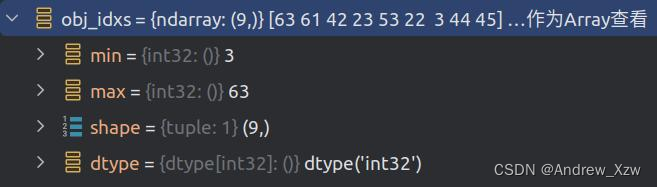
对应每一帧图片中物体的类别索引如下,包含场景中每个物体的类别索引。
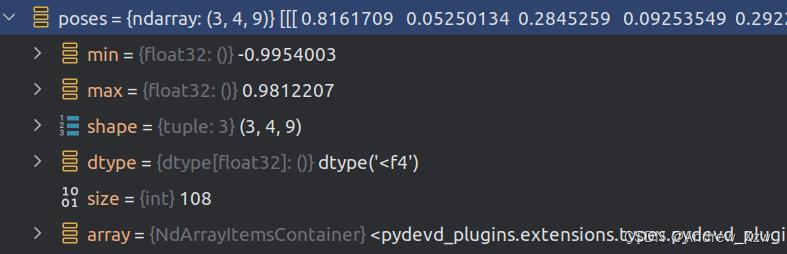
物体的位置姿态如下,每个维度的含义分别为:
3表示每个物体的姿态信息在三维空间中的三个分量;
4表示每个姿态的四元数表示法中的四个参数,用于描述物体的旋转;
9意味当前帧中对应着场景中的 9 个物体。
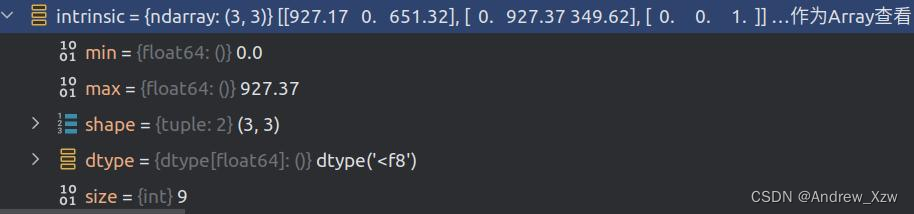
intrinsic 是一个 3x3 的矩阵。在计算机视觉中,相机内参通常以矩阵形式表示,这个矩阵通常称为相机的内部参数矩阵。
深度图像中的像素值通常是相机到场景中物体的距离,但这些距离通常以某种方式进行了标准化或缩放,factor_depth表示缩放因子。(这也是在实际场景中相机流的深度图要➗1000的原因)
1.4结合相机内参将depth转点云
其实就是将上述根据数据集中读取出来的相机参数传递 xmap = np.arange(camera.width)
ymap = np.arange(camera.height)
xmap, ymap = np.meshgri给CameraInfo类。再将这个类传递给create_point_cloud_from_depth_image函数。
记住,点云的数据格式其实就是:[N,3],N表示点的个数,3表示每个点有三个坐标,通常是 (x, y, z),分别表示点在三维空间中的位置。
以这里的相机分辨率为例,那就是求3个[720, 1280],再拼接就行。
Z方向最好求,就是将深度图➗1000(缩放因子就行)。
X、Y见下方代码注释。
最后点云数据就得到了,[720, 1280, 3]
class CameraInfo():""" Camera intrisics for point cloud creation. """def __init__(self, width, height, fx, fy, cx, cy, scale):self.width = widthself.height = heightself.fx = fxself.fy = fyself.cx = cxself.cy = cyself.scale = scaledef create_point_cloud_from_depth_image(depth, camera, organized=True):assert(depth.shape[0] == camera.height and depth.shape[1] == camera.width)#创建一个长度为相机宽度的数组,表示图像中每列的 x 坐标。xmap = np.arange(camera.width)#创建一个长度为相机高度的数组,表示图像中每列的 y 坐标。ymap = np.arange(camera.height)# 通过 meshgrid 函数创建网格,得到 (x, y) 坐标的矩阵,其中 xmap 是列索引的重复,ymap 是行索引的重复#xmap, ymap的size都是[720, 1280]xmap, ymap = np.meshgrid(xmap, ymap)#将深度值➗缩放因子points_z = depth / camera.scale#根据像素 x 坐标、相机的主点 cx 和焦距 fx 计算每个点云点的 x 坐标。points_x = (xmap - camera.cx) * points_z / camera.fx#根据像素 y 坐标、相机的主点 cy 和焦距 fy 计算每个点云点的 y 坐标。points_y = (ymap - camera.cy) * points_z / camera.fycloud = np.stack([points_x, points_y, points_z], axis=-1)if not organized:cloud = cloud.reshape([-1, 3])return cloudcamera = CameraInfo(1280.0, 720.0, intrinsic[0][0], intrinsic[1][1], intrinsic[0][2], intrinsic[1][2], factor_depth)# generate cloud
cloud = create_point_cloud_from_depth_image(depth, camera, organized=True)
1.5筛选有效的点云数据
获得根据深度图以及相机参数得到的点云数据后,先根据分割的mask获取工作区域的掩码,并结合有效深度值区域综合获得有效工作区域,最后获得效的点云数据和对应的标签以及颜色信息。
def get_workspace_mask(cloud, seg, trans=None, organized=True, outlier=0):if organized:#将点云和分割标签转换为一维数组h, w, _ = cloud.shapecloud = cloud.reshape([h*w, 3])seg = seg.reshape(h*w)if trans is not None:#将点云数据从相机坐标系转换到工作台cloud = transform_point_cloud(cloud, trans)#取分割标签为正值(非背景)的点云作为前景点云foreground = cloud[seg>0]#计算前景点云的最小和最大坐标值,得到一个表示工作空间范围的边界框。xmin, ymin, zmin = foreground.min(axis=0)xmax, ymax, zmax = foreground.max(axis=0)#根据边界框和离群点阈值,生成用于筛选工作空间内点云的掩码mask_x = ((cloud[:,0] > xmin-outlier) & (cloud[:,0] < xmax+outlier))mask_y = ((cloud[:,1] > ymin-outlier) & (cloud[:,1] < ymax+outlier))mask_z = ((cloud[:,2] > zmin-outlier) & (cloud[:,2] < zmax+outlier))workspace_mask = (mask_x & mask_y & mask_z)if organized:workspace_mask = workspace_mask.reshape([h, w])return workspace_mask# get valid points
#选出有效的点云数据和对应的标签以及颜色信息
depth_mask = (depth > 0)
seg_mask = (seg > 0)
if self.remove_outlier:camera_poses = np.load(os.path.join(self.root, 'scenes', scene, self.camera, 'camera_poses.npy'))align_mat = np.load(os.path.join(self.root, 'scenes', scene, self.camera, 'cam0_wrt_table.npy'))trans = np.dot(align_mat, camera_poses[self.frameid[index]])workspace_mask = get_workspace_mask(cloud, seg, trans=trans, organized=True, outlier=0.02)mask = (depth_mask & workspace_mask)
else:mask = depth_mask
cloud_masked = cloud[mask]
color_masked = color[mask]
seg_masked = seg[mask]
1.5随机采样
点云数据的点个数一般会比较多,这里就通过随即采样,选取20000个点。
# sample points
if len(cloud_masked) >= self.num_points:idxs = np.random.choice(len(cloud_masked), self.num_points, replace=False)
else:idxs1 = np.arange(len(cloud_masked))idxs2 = np.random.choice(len(cloud_masked), self.num_points-len(cloud_masked), replace=True)idxs = np.concatenate([idxs1, idxs2], axis=0)
cloud_sampled = cloud_masked[idxs]
color_sampled = color_masked[idxs]
seg_sampled = seg_masked[idxs]
objectness_label = seg_sampled.copy()
objectness_label[objectness_label>1] = 1
这篇关于基于GraspNet熟悉点云抓取代码的处理逻辑的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




