本文主要是介绍opencv dnn模块 示例(26) 目标检测 object_detection 之 yolov10,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、yolov10简要介绍
- 1.1、双标签分配策略
- 1.2、架构改进
- 1.3、性能
- 1.4、预训练模型
- 1.4、网络有关层说明
- 2、测试
- 2.1、官方测试
- 2.2、opencv dnn
- 仅运行到内部"NMS"步骤之前的层
- 完整代码
- 完整实现所有层
- 2.3、onnxruntime测试
- 3.4、tensorrt
1、yolov10简要介绍
从源码测试中,可以看出清华大学研究团队最新提出的 YOLOv10 是在 ultralytics yolov8 上发展来的。摘要如下:
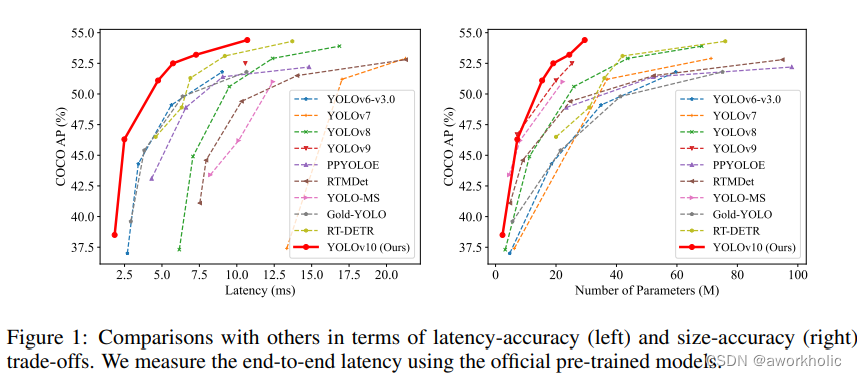
在过去的几年里,由于其在计算成本和检测性能之间的有效平衡,YOLOS已经成为实时目标检测领域的主导范例。研究人员已经探索了YOLOS的架构设计、优化目标、数据增强策略等,并取得了显著进展。然而,对用于后处理的非最大抑制(NMS)的依赖妨碍了YOLOS的端到端部署,并且影响了推理延迟。此外,YOLOS中各部件的设计缺乏全面和彻底的检查,导致明显的计算冗余,限制了模型的性能。这导致次优的效率,以及相当大的性能改进潜力。在这项工作中,我们的目标是从后处理和模型架构两个方面进一步推进YOLOS的性能-效率边界。为此,我们首先提出了用于YOLOs无NMS训练的持续双重分配,该方法带来了有竞争力的性能和低推理延迟。此外,我们还介绍了YOLOS的整体效率-精度驱动模型设计策略。我们从效率和精度两个角度对YOLOS的各个组件进行了全面优化,大大降低了计算开销,增强了性能。我们努力的成果是用于实时端到端对象检测的新一代YOLO系列,称为YOLOV10。广泛的实验表明,YOLOV10在各种模型规模上实现了最先进的性能和效率。例如,在COCO上的类似AP下,我们的YOLOV10-S比RT-DETR-R18快1.8倍,同时具有2.8倍更少的参数和FLOPS。与YOLOV9-C相比,YOLOV10-B在性能相同的情况下,延迟减少了46%,参数减少了25%。code链接:https://github.com/THU-MIG/yolov10
1.1、双标签分配策略
之前的标签分配策略是围绕着正负样本定义,通常认为与GT框IoU大于阈值作为正样本。
经典的 YOLO 架构,标签分配策略是 anchor-base,其通过网格化的方式预定义数千个锚框(anchor),然后基于这些锚框进一步执行回归和分类任务。为解决实际场景差异,提出的如kmeans聚类获得先验信息也是次优结果。后来基于anchor-free的策略被简化成了从网格点到目标框中心或者角点的距离,但是与前者同样存在多对一的问题,即对于一个GT框来说,会存在多个样本与之对应。
因此,NMS是必不可少的手段,以避免产生冗余的检测框。但是引入NMS一方面会增加耗时、也会由于IoU阈值设置不当导致高置信度的正确目标被过滤的问题。
当然,针对这个问题提出很多方案。最容易想到的是两阶段模型中一对一分配策略强制将一个GT框分配给一个正样本,这样避免引入NMS但是效率和准确率就是劣势了;One Net中最小代价分配,仅将最小代价样本匹配为正样本,其他为负样本;DETR 系列直接利用 Transformer 将目标检测看成是一个集合预测的问题。
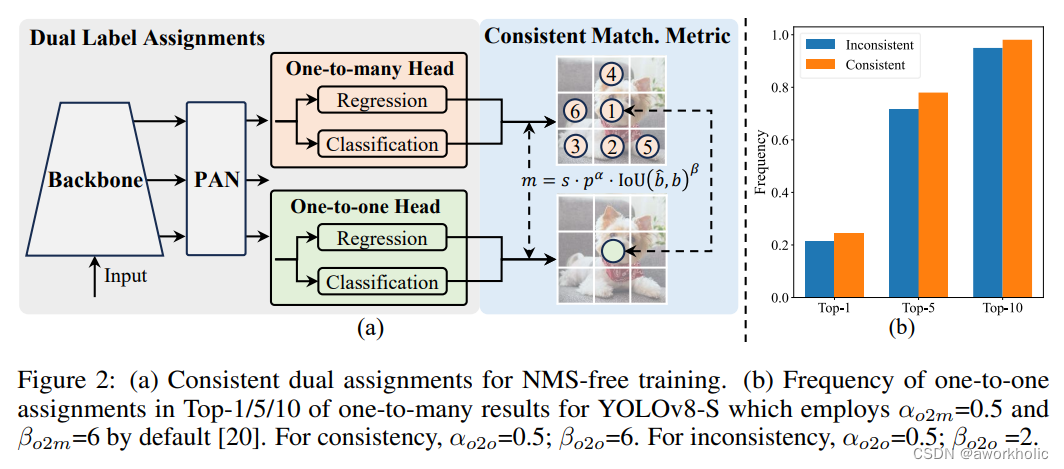
yolov10的最大创新点是引入了一种双重标签分配策略,核心思想是在训练阶段使用一对多的检测头提供更多的正样本来丰富模型的训练;而在推理阶段则通过梯度截断的方式,切换为一对一的检测头,如此一来便不在需要 NMS 后处理,在保持性能的同时减少了推理开销。
1.2、架构改进
- Backbone & Neck:使用了先进的结构如 CSPNet 作为骨干网络,和 PAN 作为颈部网络,优化了特征提取和多尺度特征融合。
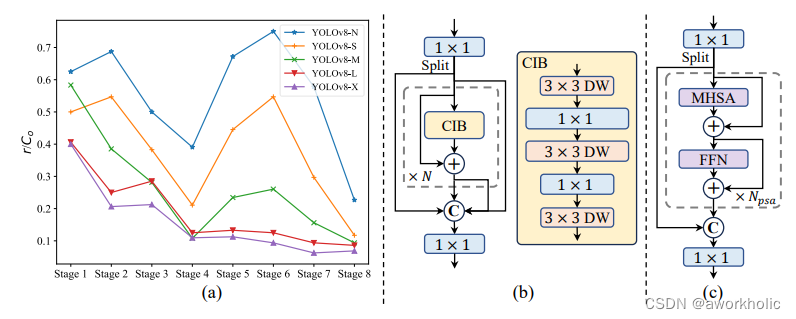
- 大卷积核与分区自注意力:这些技术用于增强模型从大范围上下文中学习的能力,提高检测准确性而不显著增加计算成本。
- 整体效率:引入空间-通道解耦下采样和基于秩引导的模块设计,减少计算冗余,提高整体模型效率。
1.3、性能
YOLOv10 在各种模型规模上显示了显著的性能和效率改进。关键比较包括:
- YOLOv10-S vs. RT-DETR-R18:YOLOv10-S 的速度提高了 1.8 倍,同时在 COCO 数据集上保持类似的平均精度(AP),参数和 FLOPs 分别减少了 2.8 倍。
- YOLOv10-B vs. YOLOv9-C:YOLOv10-B 的延迟减少了 46%,参数减少了 25%,而性能相当。
1.4、预训练模型
YOLOv10 提供了多个模型规模(N、S、M、B、L、X),允许用户根据性能和资源约束选择最适合的模型。这种可扩展性确保了 YOLOv10 能够有效应用于各种实时检测任务,从移动设备上的轻量级应用到需要高精度的复杂任务。
| Model | Test Size | #Params | FLOPs | APval | Latency |
|---|---|---|---|---|---|
| YOLOv10-N | 640 | 2.3M | 6.7G | 38.5% | 1.84ms |
| YOLOv10-S | 640 | 7.2M | 21.6G | 46.3% | 2.49ms |
| YOLOv10-M | 640 | 15.4M | 59.1G | 51.1% | 4.74ms |
| YOLOv10-B | 640 | 19.1M | 92.0G | 52.5% | 5.74ms |
| YOLOv10-L | 640 | 24.4M | 120.3G | 53.2% | 7.28ms |
| YOLOv10-X | 640 | 29.5M | 160.4G | 54.4% | 10.70ms |
1.4、网络有关层说明
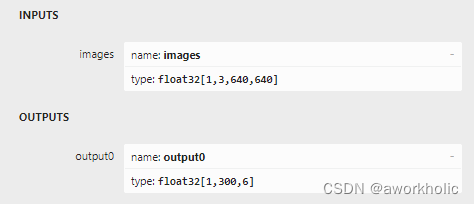
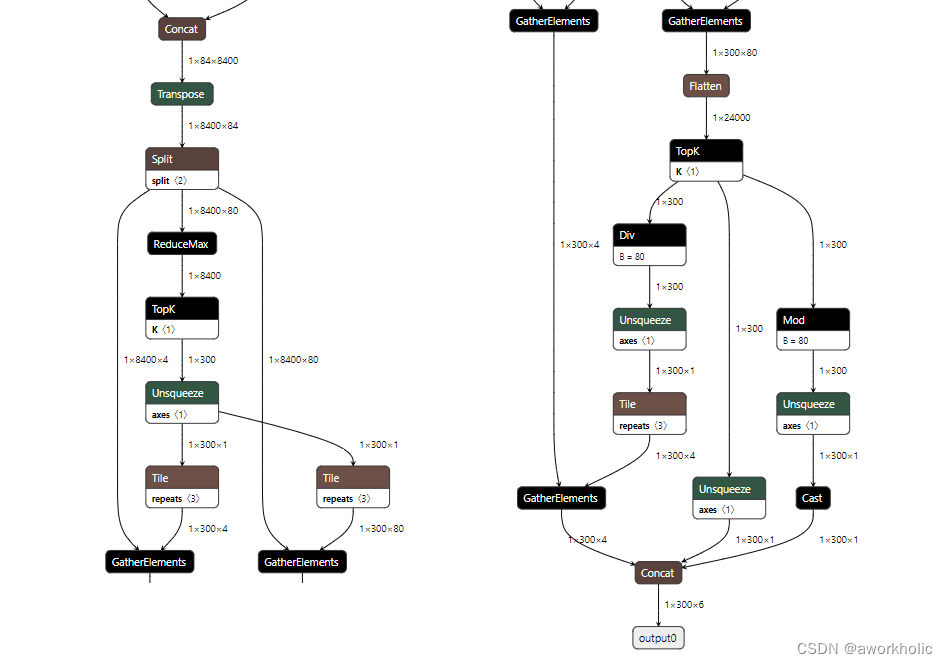
首先是输入输出,输入尺寸仍然是640*640大小。由于yolov10中移除了NMS,输出的尺寸为 [1,300,6]:
- 300:检测目标个数
- 6:目标框信息 [left, top, right, bottom, confidence, class_id]。
之前的yolo系列默认在最后才Concat后输出 1x84x8400 为网络输出,后面可能增加NMS的 end-to-end结构。这里后面处理新增了 GatherElements 、TopK 和 Mod 三个层。
2、测试
2.1、官方测试
直接使用之前 yolov8的环境即可。(python版本3.9,torch使用2.0以上)
pip install -r requirements.txt
pip install -e .wget https://github.com/THU-MIG/yolov10/releases/download/v1.1/yolov10b.pt
测试如下:
(yolo_pytorch) E:\DeepLearning\yolov10>yolo predict model=yolov10b.pt source='https://ultralytics.com/images/bus.jpg'
Ultralytics YOLOv8.1.34 🚀 Python-3.9.16 torch-1.13.1+cu117 CUDA:0 (NVIDIA GeForce GTX 1080 Ti, 11264MiB)
YOLOv10b summary (fused): 383 layers, 20534512 parameters, 148320 gradients, 98.6 GFLOPsDownloading https://ultralytics.com/images/bus.jpg to 'bus.jpg'... 100%|| 476k/476k [00:28<00:00, 17.4kB/s]
image 1/1 E:\DeepLearning\yolov10\bus.jpg: 640x480 4 persons, 1 bus, 53.5ms
Speed: 3.0ms preprocess, 53.5ms inference, 2.0ms postprocess per image at shape (1, 3, 640, 480)
Results saved to runs\detect\predict1
上面结果仅作为演示。 使用GPU要考虑第一次warmup。我们多复制几张bus.jpg到文件夹再进行测试,仍以 yolov10b.pt进行测试。
GPU Speed: 1.9ms preprocess, 18.9ms inference, 1.2ms postprocess per image
CPU Speed: 3.4ms preprocess, 738.2ms inference, 1.7ms postprocess per image
导出onnx模型测试
由于onnxruntime 仅安装了cpu版本测试
yolo export model=yolov10b.pt format=onnx opset=13 simplifyyolo predict model=yolov10b.onnx source=assets device=cpu
测试时间如下:
CPU Speed: 4.0ms preprocess, 476.3ms inference, 0.5ms postprocess per image
2.2、opencv dnn
仅运行到内部"NMS"步骤之前的层
直接使用yolov8的代码进行测试,不做postprocess处理。发现导出的onnx模型,在 opencv 4.8.0 中 不能识别的 GatherElements 、TopK 和 Mod 三个层。大概率是因为opencv 依赖的onnx版本较低,还未实现这三个层。
先简单的使用dnn模块实现这三个层的基本函数,不做推理操作,先尝试仅推理到最后的 Concat层,

CV_DNN_REGISTER_LAYER_CLASS(TopK, TopKLayer);
CV_DNN_REGISTER_LAYER_CLASS(GatherElements, GatherElementsLayer);
CV_DNN_REGISTER_LAYER_CLASS(Mod, ModLayer);std::vector<String> outNames = net.getUnconnectedOutLayersNames();
outNames = {"/model.23/Concat_5"};
dnn模块能够加载模型,但是在forward时会出现报错
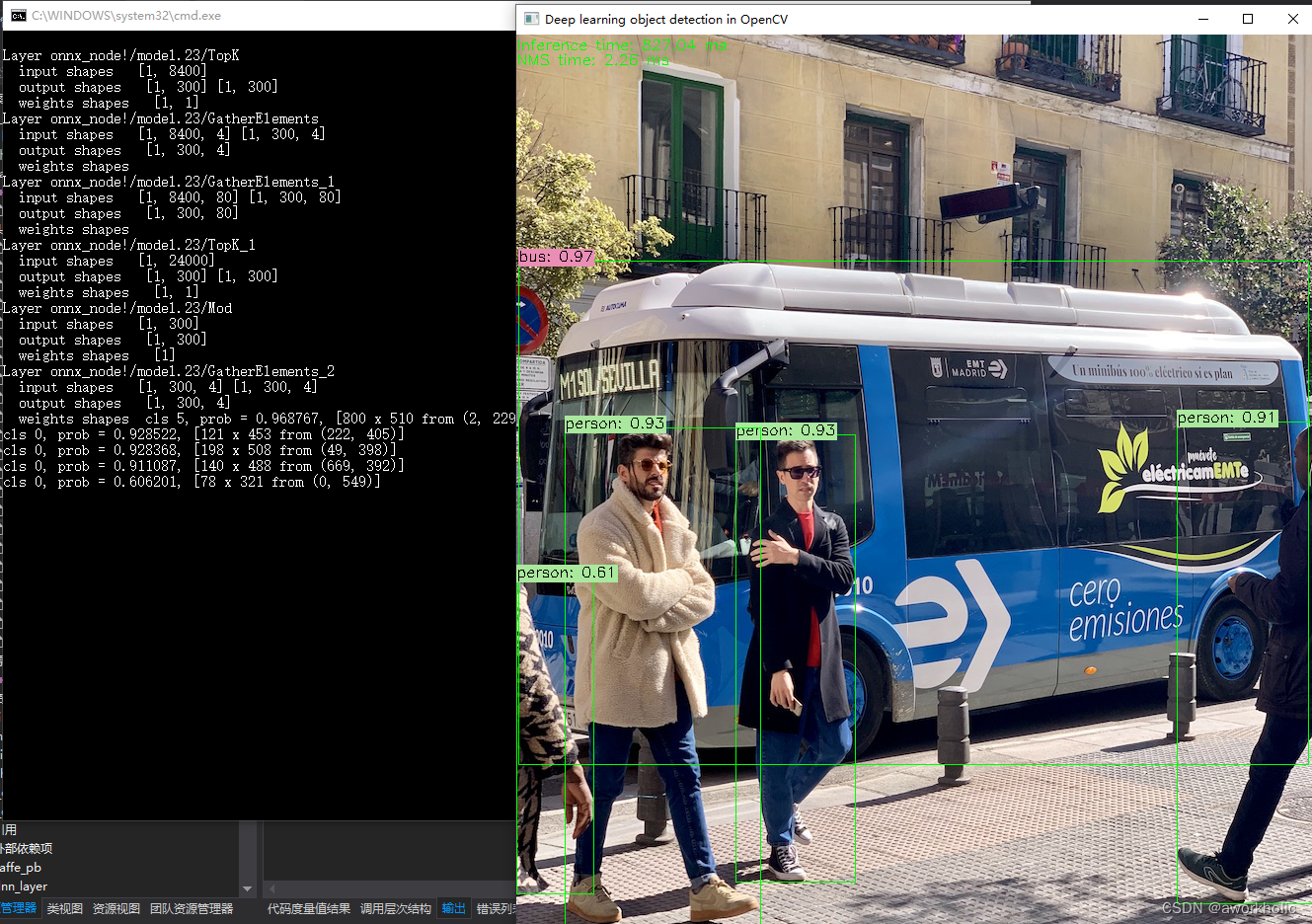
Layer onnx_node!/model.23/TopKinput shapes [1, 8400]output shapes [1, 300] [1, 300]weights shapes [1, 1]
Layer onnx_node!/model.23/GatherElementsinput shapes [1, 8400, 4] [1, 300, 4]output shapes [1, 300, 4]weights shapes
Layer onnx_node!/model.23/GatherElements_1input shapes [1, 8400, 80] [1, 300, 80]output shapes [1, 300, 80]weights shapes
Layer onnx_node!/model.23/TopK_1input shapes [1, 24000]output shapes [1, 300] [1, 300]weights shapes [1, 1]
Layer onnx_node!/model.23/Modinput shapes [1, 300]output shapes [1, 300]weights shapes [1]
Layer onnx_node!/model.23/GatherElements_2input shapes [1, 300, 4] [1, 300, 4]output shapes [1, 300, 4]weights shapes OpenCV: terminate handler is called! The last OpenCV error is:
OpenCV(4.8.0) Error: Assertion failed (biasLayerData->outputBlobsWrappers.size() == 1) in cv::dnn::dnn4_v20230620::Net::Impl::fuseLayers, file D:\opencv\opencv4.8.0\sources\modules\dnn\src\net_impl_fuse.cpp, line 608
目前暂为调试,不清楚是哪些层在fuse是报错。此时,调整为target为 CPU时,fuse不再报错,但是报错提示找不到层
OpenCV(4.8.0) Error: Requested object was not found (Layer with requested id=-1 not found) in cv::dnn::dnn4_v20230620::Net::Impl::getLayerData, file D:\opencv\opencv4.8.0\sources\modules\dnn\src\net_impl.cpp, line 279
OpenCV: terminate handler is called! The last OpenCV error is:
OpenCV(4.8.0) Error: Requested object was not found (Layer with requested id=-1 not found) in cv::dnn::dnn4_v20230620::Net::Impl::getLayerData, file D:\opencv\opencv4.8.0\sources\modules\dnn\src\net_impl.cpp, line 279
继续调试,发现是因为dnn模块加载时,会修改层的名字,我们使用的 outNames = {“/model.23/Concat_5”}; 应该修改为 outNames = {"onnx_node!/model.23/Concat_5"};,之后可以进行forward,但是结果输出有问题。
后处理的解码,84维 前四维 并不是前面系列目标框 中心点、宽高,而是 两个顶点,因此解压应该修改为
if(max_class_score > scoreThreshold) {confidences.push_back(max_class_score);class_ids.push_back(class_id.x);float x = data[0];float y = data[1];float w = data[2];float h = data[3];//int left = int((x - 0.5 * w) * x_factor);//int top = int((y - 0.5 * h) * y_factor);//int width = int(w * x_factor);//int height = int(h * y_factor);//boxes.push_back(cv::Rect(left, top, width, height));boxes.push_back(cv::Rect(x* x_factor, y* y_factor, (w - x)* x_factor, (h - y)* y_factor));}
再次运行,结果正常。
完整代码
#pragma once#include "opencv2/opencv.hpp"#include "opencv2/dnn.hpp"
#include "opencv2/dnn/layer.hpp"
#include <opencv2/dnn/layer.details.hpp> #include <fstream>
#include <sstream>#include <random>namespace YOLOv10{float inpWidth;
float inpHeight;
float confThreshold, scoreThreshold, nmsThreshold;
std::vector<std::string> classes;
std::vector<cv::Scalar> colors;bool letterBoxForSquare = true;cv::Mat formatToSquare(const cv::Mat &source);void postprocess(Mat& frame, cv::Size inputSz, const std::vector<Mat>& out, Net& net);void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame);std::random_device rd;
std::mt19937 gen(rd());
std::uniform_int_distribution<int> dis(100, 255);class TopKLayer : public cv::dnn::Layer{
public:TopKLayer(const cv::dnn::LayerParams ¶ms) : cv::dnn::Layer(params){axis = params.get<int64_t>("axis");largest = params.get<int64_t>("largest");sorted = params.get<int64_t>("sorted");}static cv::Ptr<cv::dnn::Layer> create(cv::dnn::LayerParams& params){return cv::Ptr<cv::dnn::Layer>(new TopKLayer(params));}virtual bool getMemoryShapes(const std::vector<std::vector<int> > &inputs,const int requiredOutputs,std::vector<std::vector<int> > &outputs,std::vector<std::vector<int> > &internals) const CV_OVERRIDE{CV_UNUSED(requiredOutputs); CV_UNUSED(internals);outputs.assign({{1,300},{1,300}});return false;}virtual void finalize(InputArrayOfArrays inputs_arr, OutputArrayOfArrays outputs_arr){std::vector<cv::Mat> inputs, outputs;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);auto os_shape = [](cv::MatSize& ms) {std::stringstream out;out << " [";for(int i = 0; i < ms.dims() - 1; i++)out << ms[i] << ", ";out << ms[ms.dims() - 1] << "]";return out.str();};std::cout << "\nLayer " << name;std::cout << "\n input shapes ";for(auto& input : inputs) std::cout << os_shape(input.size);std::cout << "\n output shapes ";for(auto& output : outputs) std::cout << os_shape(output.size);std::cout << "\n weights shapes ";for(auto& blob : blobs) std::cout << os_shape(blob.size);}virtual void forward(cv::InputArrayOfArrays inputs_arr,cv::OutputArrayOfArrays outputs_arr,cv::OutputArrayOfArrays internals_arr) CV_OVERRIDE{std::vector<cv::Mat> inputs, outputs, internals;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);cv::Mat& inp = inputs[0];cv::Mat& out = outputs[0];}virtual bool tryFuse(Ptr<Layer>& top){return false;}private:int64_t axis;int64_t largest;int64_t sorted;
};class GatherElementsLayer : public cv::dnn::Layer {
public:GatherElementsLayer(const cv::dnn::LayerParams ¶ms) : cv::dnn::Layer(params){axis = params.get<int64_t>("axis");}static cv::Ptr<cv::dnn::Layer> create(cv::dnn::LayerParams& params){return cv::Ptr<cv::dnn::Layer>(new GatherElementsLayer(params));}virtual bool getMemoryShapes(const std::vector<std::vector<int> > &inputs,const int requiredOutputs,std::vector<std::vector<int> > &outputs,std::vector<std::vector<int> > &internals) const CV_OVERRIDE{CV_UNUSED(requiredOutputs); CV_UNUSED(internals);auto shape1 = inputs[0];auto shape2 = inputs[1];outputs.assign(1, {1, std::min(shape1[1], shape2[1]) ,std::min(shape1[2], shape2[2])});return false;}virtual void finalize(InputArrayOfArrays inputs_arr, OutputArrayOfArrays outputs_arr){std::vector<cv::Mat> inputs, outputs;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);auto os_shape = [](cv::MatSize& ms) {std::stringstream out;out << " [";for(int i = 0; i < ms.dims() - 1; i++)out << ms[i] << ", ";out << ms[ms.dims() - 1] << "]";return out.str();};std::cout << "\nLayer " << name;std::cout << "\n input shapes ";for(auto& input : inputs) std::cout << os_shape(input.size);std::cout << "\n output shapes ";for(auto& output : outputs) std::cout << os_shape(output.size);std::cout << "\n weights shapes ";for(auto& blob : blobs) std::cout << os_shape(blob.size);}virtual void forward(cv::InputArrayOfArrays inputs_arr,cv::OutputArrayOfArrays outputs_arr,cv::OutputArrayOfArrays internals_arr) CV_OVERRIDE{std::vector<cv::Mat> inputs, outputs, internals;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);cv::Mat& inp = inputs[0];cv::Mat& out = outputs[0];}virtual bool tryFuse(Ptr<Layer>& top){return false;}private:int64_t axis;
};class ModLayer : public cv::dnn::Layer {
public:ModLayer(const cv::dnn::LayerParams ¶ms) : cv::dnn::Layer(params){fmod = params.get<int64_t>("fmod");}static cv::Ptr<cv::dnn::Layer> create(cv::dnn::LayerParams& params){return cv::Ptr<cv::dnn::Layer>(new ModLayer(params));}virtual bool getMemoryShapes(const std::vector<std::vector<int> > &inputs,const int requiredOutputs,std::vector<std::vector<int> > &outputs,std::vector<std::vector<int> > &internals) const CV_OVERRIDE{CV_UNUSED(requiredOutputs); CV_UNUSED(internals);outputs.assign(1, {1, 300});return false;}virtual void finalize(InputArrayOfArrays inputs_arr, OutputArrayOfArrays outputs_arr){std::vector<cv::Mat> inputs, outputs;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);auto os_shape = [](cv::MatSize& ms) {std::stringstream out;out << " [";for(int i = 0; i < ms.dims() - 1; i++)out << ms[i] << ", ";out << ms[ms.dims() - 1] << "]";return out.str();};std::cout << "\nLayer " << name;std::cout << "\n input shapes ";for(auto& input : inputs) std::cout << os_shape(input.size);std::cout << "\n output shapes ";for(auto& output : outputs) std::cout << os_shape(output.size);std::cout << "\n weights shapes ";for(auto& blob : blobs) std::cout << os_shape(blob.size);}virtual void forward(cv::InputArrayOfArrays inputs_arr,cv::OutputArrayOfArrays outputs_arr,cv::OutputArrayOfArrays internals_arr) CV_OVERRIDE{std::vector<cv::Mat> inputs, outputs, internals;inputs_arr.getMatVector(inputs);outputs_arr.getMatVector(outputs);cv::Mat& inp = inputs[0];cv::Mat& out = outputs[0];}virtual bool tryFuse(Ptr<Layer>& top){return false;}private:int64_t fmod;
};int test()
{CV_DNN_REGISTER_LAYER_CLASS(TopK, TopKLayer);CV_DNN_REGISTER_LAYER_CLASS(GatherElements, GatherElementsLayer);CV_DNN_REGISTER_LAYER_CLASS(Mod, ModLayer);// 根据选择的检测模型文件进行配置 confThreshold = 0.25;scoreThreshold = 0.45;nmsThreshold = 0.5;float scale = 1 / 255.0; //0.00392Scalar mean = {0,0,0};bool swapRB = true;inpWidth = 640;inpHeight = 640;//String modelPath = R"(E:\DeepLearning\yolov9\yolov9-c-converted.onnx)";cv::String modelPath = R"(E:\DeepLearning\yolov10\yolov10b.onnx)";cv::String configPath;cv::String framework = ""; //String classesFile = R"(model\object_detection_classes_yolov3.txt)";//String classesFile = model_dir + R"(\data\coco.names)";String classesFile = R"(E:\DeepLearning\darknet-alexab_master\build——ori\darknet\x64)" + std::string(R"(\data\coco.names)");//cv::String classesFile = R"(E:\DeepLearning\yolov9\custom-data\vehicle\cls.txt)";int backendId = cv::dnn::DNN_BACKEND_OPENCV;int targetId = cv::dnn::DNN_TARGET_CPU; //int backendId = cv::dnn::DNN_BACKEND_OPENCV;//int targetId = cv::dnn::DNN_TARGET_OPENCL; //int backendId = cv::dnn::DNN_BACKEND_CUDA;//int targetId = cv::dnn::DNN_TARGET_CUDA;// Open file with classes names.if(!classesFile.empty()) {const std::string& file = classesFile;std::ifstream ifs(file.c_str());if(!ifs.is_open())CV_Error(Error::StsError, "File " + file + " not found");std::string line;while(std::getline(ifs, line)) {classes.push_back(line);colors.push_back(cv::Scalar(dis(gen), dis(gen), dis(gen)));}}// Load a model.Net net = cv::dnn::readNet(modelPath, configPath, framework);net.setPreferableBackend(backendId);net.setPreferableTarget(targetId);std::vector<String> outNames = net.getUnconnectedOutLayersNames();//outNames = {"/model.23/Concat_5"};outNames = {"onnx_node!/model.23/Concat_5"};if(backendId == cv::dnn::DNN_BACKEND_CUDA) {int dims[] = {1,3,inpHeight,inpWidth};cv::Mat tmp = cv::Mat::zeros(4, dims, CV_32F);std::vector<cv::Mat> outs;net.setInput(tmp);for(int i = 0; i < 10; i++)net.forward(outs, outNames); // warmup}// Create a windowstatic const std::string kWinName = "Deep learning object detection in OpenCV";//cv::namedWindow(kWinName, 0);// Open a video file or an image file or a camera stream.VideoCapture cap;//cap.open(0);//cap.open(R"(E:\DeepLearning\darknet-yolo3-master\build\darknet\x64\dog.jpg)");//cap.open("http://live.cooltv.top/tv/aishang.php?id=cctv1hd");//cap.open(R"(F:\测试视频\路口俯拍\snap1.mkv)");cap.open(R"(E:\DeepLearning\yolov9\bus.jpg)");//cap.open(R"(E:\DeepLearning\yolov9\custom-data\vehicle\images\11.jpg)");cv::TickMeter tk;// Process frames.Mat frame, blob;while(waitKey(1) < 0) {//tk.reset();//tk.start();cap >> frame;if(frame.empty()) {waitKey();break;}// Create a 4D blob from a frame.cv::Mat modelInput = frame;if(letterBoxForSquare && inpWidth == inpHeight)modelInput = formatToSquare(modelInput);blobFromImage(modelInput, blob, scale, cv::Size2f(inpWidth, inpHeight), mean, swapRB, false);// Run a model.net.setInput(blob);std::vector<Mat> outs;//tk.reset();//tk.start();auto tt1 = cv::getTickCount();net.forward(outs, outNames);auto tt2 = cv::getTickCount();tk.stop();postprocess(frame, modelInput.size(), outs, net);//tk.stop(); Put efficiency information.//std::vector<double> layersTimes;//double freq = getTickFrequency() / 1000;//double t = net.getPerfProfile(layersTimes) / freq;//std::string label = format("Inference time: %.2f ms (%.2f ms)", t, /*tk.getTimeMilli()*/ (tt2 - tt1) / cv::getTickFrequency() * 1000);std::string label = format("Inference time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);cv::putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));//printf("\r%s\t", label.c_str());cv::imshow(kWinName, frame);}return 0;
}cv::Mat formatToSquare(const cv::Mat &source)
{int col = source.cols;int row = source.rows;int _max = MAX(col, row);cv::Mat result = cv::Mat::zeros(_max, _max, CV_8UC3);source.copyTo(result(cv::Rect(0, 0, col, row)));return result;
}void postprocess(Mat& frame, cv::Size inputSz, const std::vector<Mat>& outs, Net& net)
{// yolov8 has an output of shape (batchSize, 84, 8400) (Num classes + box[x,y,w,h] + confidence[c])auto tt1 = cv::getTickCount();float x_factor = inputSz.width / inpWidth;float y_factor = inputSz.height / inpHeight;std::vector<int> class_ids;std::vector<float> confidences;std::vector<cv::Rect> boxes;//int rows = outs[0].size[1];//int dimensions = outs[0].size[2];// [1, 84, 8400] -> [8400,84]int rows = outs[0].size[2];int dimensions = outs[0].size[1];auto tmp = outs[0].reshape(1, dimensions);cv::transpose(tmp, tmp);float *data = (float *)tmp.data;for(int i = 0; i < rows; ++i) {//float confidence = data[4];//if(confidence >= confThreshold) {float *classes_scores = data + 4;cv::Mat scores(1, classes.size(), CV_32FC1, classes_scores);cv::Point class_id;double max_class_score;minMaxLoc(scores, 0, &max_class_score, 0, &class_id);if(max_class_score > scoreThreshold) {confidences.push_back(max_class_score);class_ids.push_back(class_id.x);float x = data[0];float y = data[1];float w = data[2];float h = data[3];//int left = int((x - 0.5 * w) * x_factor);//int top = int((y - 0.5 * h) * y_factor);//int width = int(w * x_factor);//int height = int(h * y_factor);//boxes.push_back(cv::Rect(left, top, width, height));boxes.push_back(cv::Rect(x* x_factor, y* y_factor, (w - x)* x_factor, (h - y)* y_factor));}//}data += dimensions;}std::vector<int> indices;NMSBoxes(boxes, confidences, scoreThreshold, nmsThreshold, indices);auto tt2 = cv::getTickCount();std::string label = format("NMS time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);cv::putText(frame, label, Point(0, 30), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));for(size_t i = 0; i < indices.size(); ++i) {int idx = indices[i];Rect box = boxes[idx];drawPred(class_ids[idx], confidences[idx], box.x, box.y,box.x + box.width, box.y + box.height, frame);//printf("cls = %d, prob = %.2f\n", class_ids[idx], confidences[idx]);std::cout << "cls " << class_ids[idx] << ", prob = " << confidences[idx] << ", " << box << "\n";}}void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 255, 0));std::string label = format("%.2f", conf);Scalar color = Scalar::all(255);if(!classes.empty()) {CV_Assert(classId < (int)classes.size());label = classes[classId] + ": " + label;color = colors[classId];}int baseLine;Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);top = max(top, labelSize.height);rectangle(frame, Point(left, top - labelSize.height),Point(left + labelSize.width, top + baseLine), color, FILLED);cv::putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar());
}
} // namespace
完整实现所有层
这里留个尾巴把,对照python的源码实现当前dnn未识别的三个层。
2.3、onnxruntime测试
仅测试前向推理的时间 CPU 1s, GPU 20ms。 cpu上测试和python的onnxruntime测试有出入。
直接给出代码如下:
#include <onnxruntime_cxx_api.h>#include "opencv2/opencv.hpp"
#include "opencv2/dnn.hpp" // cv::blobFromImage#include <iostream>
#include <vector>
#include <algorithm>
#include <fstream>#include <opencv2/core/version.hpp>
#define CV_VERSION CVAUX_STR(CV_VERSION_MAJOR) "" CVAUX_STR(CV_VERSION_MINOR) "" CVAUX_STR(CV_VERSION_REVISION) "" CV_VERSION_STATUS#ifndef NDEBUG
#pragma comment(lib,"opencv_core" CV_VERSION "d.lib")
#pragma comment(lib,"opencv_videoio" CV_VERSION "d.lib")
#pragma comment(lib,"opencv_imgproc" CV_VERSION "d.lib")
#pragma comment(lib,"opencv_imgcodecs" CV_VERSION "d.lib")
#pragma comment(lib,"opencv_highgui" CV_VERSION "d.lib")
#pragma comment(lib,"opencv_dnn" CV_VERSION "d.lib") // cv::blobFromImage
#else
//#pragma comment(lib,"opencv_world" CV_VERSION ".lib")
#pragma comment(lib,"opencv_core" CV_VERSION ".lib")
#pragma comment(lib,"opencv_videoio" CV_VERSION ".lib")
#pragma comment(lib,"opencv_imgproc" CV_VERSION ".lib")
#pragma comment(lib,"opencv_imgcodecs" CV_VERSION ".lib")
#pragma comment(lib,"opencv_highgui" CV_VERSION ".lib")
#pragma comment(lib,"opencv_dnn" CV_VERSION ".lib") // cv::blobFromImage
#endif#pragma comment(lib,"onnxruntime.lib")
#pragma comment(lib,"onnxruntime_providers_shared.lib")
#pragma comment(lib,"onnxruntime_providers_cuda.lib")using namespace cv;const std::vector<std::string> CLASS_NAMES = {"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light","fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow","elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee","skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard","tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple","sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch","potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard","cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase","scissors", "teddy bear", "hair drier", "toothbrush"};// Function to load and preprocess the image
std::vector<float> preprocessImage(const std::string& image_path, const std::vector<int64_t>& input_shape, int& orig_width, int& orig_height)
{cv::Mat image = cv::imread(image_path);if(image.empty()) {throw std::runtime_error("Could not read the image: " + image_path);}// Save the original dimensionsorig_width = image.cols;orig_height = image.rows;//cv::Mat resized_image;//cv::resize(image, resized_image, cv::Size(input_shape[2], input_shape[3]));//resized_image.convertTo(resized_image, CV_32F, 1.0 / 255);//std::vector<cv::Mat> channels(3);//cv::split(resized_image, channels);//std::vector<float> input_tensor_values;//for(int c = 0; c < 3; ++c) {// input_tensor_values.insert(input_tensor_values.end(), (float*)channels[c].data, (float*)channels[c].data + input_shape[2] * input_shape[3]);//}//return input_tensor_values;cv::Mat blob;cv::dnn::blobFromImage(image, blob, 1. / 255, cv::Size(input_shape[2], input_shape[3]));auto input_tensor_values = std::vector<float>((float*)blob.data, (float*)blob.dataend);return input_tensor_values;
}// Function to load the ONNX model and create a session
Ort::Session loadModel(Ort::Env& env, const std::string& model_path, Ort::SessionOptions& session_options)
{std::ifstream ifs(model_path, std::ios::binary);ifs.seekg(0, ifs.end);size_t length = ifs.tellg();ifs.seekg(0, ifs.beg);std::vector<char> buffer(length);ifs.read(&buffer[0], length);return Ort::Session(env, buffer.data(), length, session_options);
}// Function to get the input name of the model
std::string getInputName(Ort::Session& session, Ort::AllocatorWithDefaultOptions& allocator)
{Ort::AllocatedStringPtr name_allocator = session.GetInputNameAllocated(0, allocator);return std::string(name_allocator.get());
}// Function to get the output name of the model
std::string getOutputName(Ort::Session& session, Ort::AllocatorWithDefaultOptions& allocator)
{Ort::AllocatedStringPtr name_allocator = session.GetOutputNameAllocated(0, allocator);return std::string(name_allocator.get());
}// Struct to hold detection results
struct Detection
{float confidence;cv::Rect bbox;int class_id;std::string class_name;
};// Function to filter and post-process the results based on a confidence threshold
std::vector<Detection> filterDetections(const std::vector<float>& results, float confidence_threshold, int img_width, int img_height, int orig_width, int orig_height)
{std::vector<Detection> detections;const int num_detections = results.size() / 6;for(int i = 0; i < num_detections; ++i) {float left = results[i * 6 + 0];float top = results[i * 6 + 1];float right = results[i * 6 + 2];float bottom = results[i * 6 + 3];float confidence = results[i * 6 + 4];int class_id = results[i * 6 + 5];if(confidence >= confidence_threshold) {int x = static_cast<int>(left * orig_width / img_width);int y = static_cast<int>(top * orig_height / img_height);int width = static_cast<int>((right - left) * orig_width / img_width);int height = static_cast<int>((bottom - top) * orig_height / img_height);detections.push_back({confidence,cv::Rect(x, y, width, height),class_id,CLASS_NAMES[class_id]});}}return detections;
}// Function to run inference on the model
std::vector<float> runInference(Ort::Session& session, const std::vector<float>& input_tensor_values, const std::vector<int64_t>& input_shape)
{Ort::AllocatorWithDefaultOptions allocator;std::string input_name = getInputName(session, allocator);std::string output_name = getOutputName(session, allocator);const char* input_name_ptr = input_name.c_str();const char* output_name_ptr = output_name.c_str();Ort::MemoryInfo memory_info = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault);Ort::Value input_tensor = Ort::Value::CreateTensor<float>(memory_info, const_cast<float*>(input_tensor_values.data()), input_tensor_values.size(), input_shape.data(), input_shape.size());auto output_tensors = session.Run(Ort::RunOptions{nullptr}, &input_name_ptr, &input_tensor, 1, &output_name_ptr, 1);for(int i =0;i<5;i++)auto output_tensors = session.Run(Ort::RunOptions{nullptr}, &input_name_ptr, &input_tensor, 1, &output_name_ptr, 1);auto t1 = cv::getTickCount();output_tensors = session.Run(Ort::RunOptions{nullptr}, &input_name_ptr, &input_tensor, 1, &output_name_ptr, 1);auto t2 = cv::getTickCount();std::cout << "=========== " << (t2-t1)/cv::getTickFrequency() << std::endl;float* floatarr = output_tensors[0].GetTensorMutableData<float>();size_t output_tensor_size = output_tensors[0].GetTensorTypeAndShapeInfo().GetElementCount();return std::vector<float>(floatarr, floatarr + output_tensor_size);
}int main()
{std::string model_path = R"(E:\DeepLearning\yolov10\yolov10b.onnx)";std::string image_path = R"(E:\DeepLearning\yolov9\bus.jpg)";// Initialize ONNX Runtime environmentOrt::Env env(ORT_LOGGING_LEVEL_WARNING, "ONNXRuntime");// Create session optionsOrt::SessionOptions session_options;OrtCUDAProviderOptions cuda_option;cuda_option.device_id = 0;cuda_option.arena_extend_strategy = 0;cuda_option.cudnn_conv_algo_search = OrtCudnnConvAlgoSearchExhaustive;cuda_option.gpu_mem_limit = SIZE_MAX;cuda_option.do_copy_in_default_stream = 1;session_options.AppendExecutionProvider_CUDA(cuda_option);session_options.SetIntraOpNumThreads(1);session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_BASIC);try {// Load modelOrt::Session session = loadModel(env, model_path, session_options);// Define input shape (e.g., {1, 3, 640, 640})std::vector<int64_t> input_shape = {1, 3, 640, 640};// Save original image dimensionsint orig_width, orig_height;// Preprocess imagestd::vector<float> input_tensor_values = preprocessImage(image_path, input_shape, orig_width, orig_height);// Run inferencestd::vector<float> results = runInference(session, input_tensor_values, input_shape);// Define confidence thresholdfloat confidence_threshold = 0.5;// Load the image to get its dimensionscv::Mat image = cv::imread(image_path);int img_width = image.cols;int img_height = image.rows;// Filter resultsstd::vector<Detection> detections = filterDetections(results, confidence_threshold, input_shape[2], input_shape[3], orig_width, orig_height);// Print detections and draw bounding boxesfor(const auto& detection : detections) {std::cout << "Class ID: " << detection.class_id << " Confidence: " << detection.confidence<< " BBox: [" << detection.bbox.x << ", " << detection.bbox.y << ", "<< detection.bbox.width << ", " << detection.bbox.height << "]"<< " Class Name: " << detection.class_name << std::endl;// Draw the bounding box on the imagecv::rectangle(image, detection.bbox, cv::Scalar(0, 255, 0), 2);// Put the class name and confidence on the imagestd::string label = detection.class_name + ": " + std::to_string(detection.confidence);int baseLine;cv::Size labelSize = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);cv::rectangle(image, cv::Point(detection.bbox.x, detection.bbox.y - labelSize.height),cv::Point(detection.bbox.x + labelSize.width, detection.bbox.y + baseLine),cv::Scalar(255, 255, 255), cv::FILLED);cv::putText(image, label, cv::Point(detection.bbox.x, detection.bbox.y),cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0), 1);}// Save the resulting imagecv::imwrite("result.jpg", image);}catch(const std::exception& e) {std::cerr << "Error: " << e.what() << std::endl;return 1;}return 0;
}
3.4、tensorrt
运行脚本
trtexec.exe --onnx E:\DeepLearning\yolov10\yolov10b.onnx
报错,不支持Mod层。
[05/31/2024-17:44:24] [I] [TRT] No importer registered for op: Mod. Attempting to import as plugin.
[05/31/2024-17:44:24] [I] [TRT] Searching for plugin: Mod, plugin_version: 1, plugin_namespace:
[05/31/2024-17:44:24] [E] [TRT] ModelImporter.cpp:773: While parsing node number 433 [Mod -> "/model.23/Mod_output_0"]:
[05/31/2024-17:44:24] [E] [TRT] ModelImporter.cpp:774: --- Begin node ---
[05/31/2024-17:44:24] [E] [TRT] ModelImporter.cpp:775: input: "/model.23/TopK_1_output_1"
input: "/model.23/Constant_13_output_0"
output: "/model.23/Mod_output_0"
name: "/model.23/Mod"
op_type: "Mod"
attribute {name: "fmod"i: 0type: INT
}[05/31/2024-17:44:24] [E] [TRT] ModelImporter.cpp:776: --- End node ---
这篇关于opencv dnn模块 示例(26) 目标检测 object_detection 之 yolov10的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






