本文主要是介绍RTOS(ENV)串口DMA接收GPS数据并解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
RTOS(ENV)配置STM32串口DMA接收模式
环境:
- RTOS 4.0.3
- Keil5
- ENV
- STm32l475
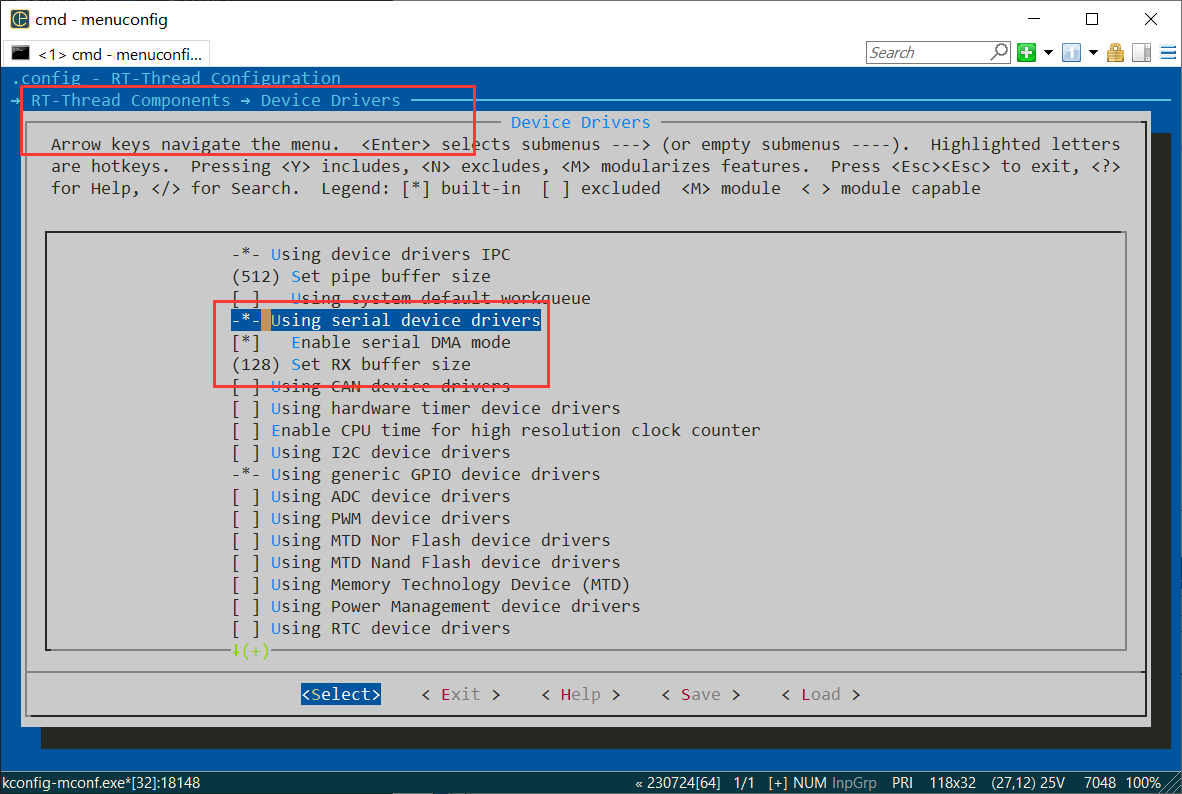
ENV配置
- 使能串口:

2. 使能DMA,并设置接收缓冲区大小:
- 创建工程
scons --target=mdk
工程配置
1. 创建串口设备句柄
#define SAMPLE_UART_NAME "uart2" /* 串口设备名称 */
rt_device_t serial; /*句柄*/
2.使用消息队列方式
/* 串口接收消息结构*/
struct rx_msg
{rt_device_t dev;rt_size_t size;
};
/* 串口设备句柄 */
static rt_device_t serial;
/* 消息队列控制块 */
static struct rt_messagequeue rx_mq;
3.打开设备方式
/* 以 DMA 接收及轮询发送方式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_DMA_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_input);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));
注意:
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; // 初始化配置
/* 控制串口设备。通过控制接口传入命令控制字,与控制参数 */
rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);
这些步骤是非DMA方式(中断)接收的,使用 rt_device_control函数 会影响DMA共能得使用
4. 串口接收数据
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{struct rx_msg msg;rt_err_t result;msg.dev = dev;msg.size = size;result = rt_mq_send(&rx_mq, &msg, sizeof(msg));if ( result == -RT_EFULL){/* 消息队列满 */rt_kprintf("message queue full!\n");}return result;
}static void serial_thread_entry(void *parameter)
{struct rx_msg msg;rt_err_t result;rt_uint32_t rx_length;static char rx_buffer[RT_SERIAL_RB_BUFSZ + 1];while (1){rt_memset(&msg, 0, sizeof(msg));/* 从消息队列中读取消息*/result = rt_mq_recv(&rx_mq, &msg, sizeof(msg), RT_WAITING_FOREVER);if (result == RT_EOK){/* 从串口读取数据*/rx_length = rt_device_read(msg.dev, 0, rx_buffer, msg.size);rx_buffer[rx_length] = '\0';/* 通过串口设备 serial 输出读取到的消息 */rt_device_write(serial, 0, rx_buffer, rx_length);/* 打印数据 */rt_kprintf("%s\n",rx_buffer);}}
}
源code:
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include <drv_lcd.h>
#include <rttlogo.h>#define SAMPLE_UART_NAME "uart2"/* 串口接收消息结构*/
struct rx_msg
{rt_device_t dev;rt_size_t size;
};
/* 串口设备句柄 */
static rt_device_t serial;
/* 消息队列控制块 */
static struct rt_messagequeue rx_mq;/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{struct rx_msg msg;rt_err_t result;msg.dev = dev;msg.size = size;result = rt_mq_send(&rx_mq, &msg, sizeof(msg));if ( result == -RT_EFULL){/* 消息队列满 */rt_kprintf("message queue full!\n");}return result;
}static void serial_thread_entry(void *parameter)
{struct rx_msg msg;rt_err_t result;rt_uint32_t rx_length;static char rx_buffer[RT_SERIAL_RB_BUFSZ + 1];while (1){rt_memset(&msg, 0, sizeof(msg));/* 从消息队列中读取消息*/result = rt_mq_recv(&rx_mq, &msg, sizeof(msg), RT_WAITING_FOREVER);if (result == RT_EOK){/* 从串口读取数据*/rx_length = rt_device_read(msg.dev, 0, rx_buffer, msg.size);rx_buffer[rx_length] = '\0';/* 通过串口设备 serial 输出读取到的消息 */rt_device_write(serial, 0, rx_buffer, rx_length);/* 打印数据 */rt_kprintf("%s\n",rx_buffer);}}
}void main(void)
{static char msg_pool[256];char str[] = "hello RT-Thread!666\r\n";/* 查找串口设备 */serial = rt_device_find(SAMPLE_UART_NAME);if (!serial){rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);}/* 初始化消息队列 */rt_mq_init(&rx_mq, "rx_mq",msg_pool, /* 存放消息的缓冲区 */sizeof(struct rx_msg), /* 一条消息的最大长度 */sizeof(msg_pool), /* 存放消息的缓冲区大小 */RT_IPC_FLAG_FIFO); /* 如果有多个线程等待,按照先来先得到的方法分配消息 *//* 以 DMA 接收及轮询发送方式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_DMA_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_input);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL){rt_thread_startup(thread);}else{rt_kprintf("Create %s Entry failed!\n", SAMPLE_UART_NAME);}}附加例题:RT-Thread使用消息邮箱解析GPS数据
使用消息邮箱完成以下任务:
创建2个线程:串口接收和解析线程、LCD显示线程;
-
串口线程接收和解析GPS设备通过串口发来的数据(以GPRMC为主),发送给邮箱;
-
LCD显示线程获取邮箱里的邮件消息,提取相关信息(如 经纬度位置、速度、方向、当前时间等),显示到LCD屏幕上。
-
使用PC上位机的串口调试助手发送GPS接收数据,模拟GPS接收机。
参考资料:GPS数据包格式及数据包解析(https://blog.csdn.net/qq_17308321/article/details/80714560)
GPS接收机接收到的数据样例:
$GPRMC,092927.000,A,2235.9058,N,11400.0518,E,0.000,74.11,151216,,D*49
$GPVTG,74.11,T,,M,0.000,N,0.000,K,D*0B
$GPGGA,092927.000,2235.9058,N,11400.0518,E,2,9,1.03,53.1,M,-2.4,M,0.0,0*6B
$GPGSA,A,3,29,18,12,25,10,193,32,14,31,,,,1.34,1.03,0.85*31
$GPGSV,3,1,12,10,77,192,17,25,59,077,42,32,51,359,39,193,49,157,36*48
$GPGSV,3,2,12,31,47,274,25,50,46,122,37,18,45,158,37,14,36,326,18*70
$GPGSV,3,3,12,12,24,045,45,26,17,200,18,29,07,128,38,21,02,174,*79
1. 添加GPS数据解析模块
- 定义数据结构
/*邮箱控股句柄*/
rt_mailbox_t uart_gps_mail;typedef struct GpsData
{char Time[30];char Status[30];char Latitude[30];char N_S[30];char Longitude[30];char E_W[30];char Ground_Speed[30];char Course[30];char Date[30];
} GpsData;- 添加GPS数据解析函数
//解析 NMEA 句子并提取信息的函数
void parseNMEA(const char *sentence)
{char utcTime[12];char status;double latitude, longitude, groundSpeed, course;char utcDate[7];// 使用 sscanf 函数从 NMEA 句子中提取信息sscanf(sentence, "$GPRMC,%[^,],%c,%lf,N,%lf,E,%lf,%lf,%[^,],",utcTime, &status, &latitude, &longitude, &groundSpeed, &course, utcDate);// 提取小时、分钟和秒int hour, minute;double second;sscanf(utcTime, "%2d%2d%lf", &hour, &minute, &second);// 提取日期int year, month, day;sscanf(utcDate, "%2d%2d%2d", &day, &month, &year);// 打印提取的信息sprintf(gpsData.Time, "Time: %02d:%02d:%06.3lf", hour, minute, second);sprintf(gpsData.Status, "Status: %s", (status == 'A') ? "Valid" : "Invalid");sprintf(gpsData.Latitude, "Latitude: %.4f N", latitude);sprintf(gpsData.Longitude, "Longitude: %.4f E", longitude);sprintf(gpsData.Ground_Speed, "Speed: %.3f knots", groundSpeed);sprintf(gpsData.Course, "Course: %.2f ", course);sprintf(gpsData.Date, "Date: %02d-%02d-%02d", year, month, day);rt_mb_send(uart_gps_mail, (rt_uint32_t)&gpsData);
}
2. 添加lcd显示线程:
void lcd_show(void *parameter)
{lcd_clear(WHITE);lcd_set_color(WHITE, BLACK);GpsData *gpsData;while (1){rt_mb_recv(uart_gps_mail, (rt_ubase_t *)&gpsData, RT_WAITING_FOREVER);lcd_show_string(10, 10, 16, gpsData->Time);lcd_show_string(10, 40, 16, gpsData->Status);lcd_show_string(10, 70, 16, gpsData->Latitude);lcd_show_string(10, 100, 16, gpsData->Longitude);lcd_show_string(10, 130, 16, gpsData->Ground_Speed);lcd_show_string(10, 160, 16, gpsData->Course);lcd_show_string(10, 190, 16, gpsData->Date);}
}
3. 源code
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include <drv_lcd.h>
#include <rttlogo.h>
#include <stdio.h>
#include <string.h>#define SAMPLE_UART_NAME "uart2"/* 串口接收消息结构*/
struct rx_msg
{rt_device_t dev;rt_size_t size;
};
/* 串口设备句柄 */
static rt_device_t serial;
/* 消息队列控制块 */
static struct rt_messagequeue rx_mq;
/*邮箱控股句柄*/
rt_mailbox_t uart_gps_mail;typedef struct GpsData
{char Time[30];char Status[30];char Latitude[30];char N_S[30];char Longitude[30];char E_W[30];char Ground_Speed[30];char Course[30];char Date[30];
} GpsData;GpsData gpsData;void lcd_show(void *parameter)
{lcd_clear(WHITE);lcd_set_color(WHITE, BLACK);GpsData *gpsData;while (1){rt_mb_recv(uart_gps_mail, (rt_ubase_t *)&gpsData, RT_WAITING_FOREVER);lcd_show_string(10, 10, 16, gpsData->Time);lcd_show_string(10, 40, 16, gpsData->Status);lcd_show_string(10, 70, 16, gpsData->Latitude);lcd_show_string(10, 100, 16, gpsData->Longitude);lcd_show_string(10, 130, 16, gpsData->Ground_Speed);lcd_show_string(10, 160, 16, gpsData->Course);lcd_show_string(10, 190, 16, gpsData->Date);}
}// 解析 NMEA 句子并提取信息的函数
void parseNMEA(const char *sentence)
{char utcTime[12];char status;double latitude, longitude, groundSpeed, course;char utcDate[7];// 使用 sscanf 函数从 NMEA 句子中提取信息sscanf(sentence, "$GPRMC,%[^,],%c,%lf,N,%lf,E,%lf,%lf,%[^,],",utcTime, &status, &latitude, &longitude, &groundSpeed, &course, utcDate);// 提取小时、分钟和秒int hour, minute;double second;sscanf(utcTime, "%2d%2d%lf", &hour, &minute, &second);// 提取日期int year, month, day;sscanf(utcDate, "%2d%2d%2d", &day, &month, &year);// 打印提取的信息sprintf(gpsData.Time, "Time: %02d:%02d:%06.3lf", hour, minute, second);sprintf(gpsData.Status, "Status: %s", (status == 'A') ? "Valid" : "Invalid");sprintf(gpsData.Latitude, "Latitude: %.4f N", latitude);sprintf(gpsData.Longitude, "Longitude: %.4f E", longitude);sprintf(gpsData.Ground_Speed, "Speed: %.3f knots", groundSpeed);sprintf(gpsData.Course, "Course: %.2f ", course);sprintf(gpsData.Date, "Date: %02d-%02d-%02d", year, month, day);rt_mb_send(uart_gps_mail, (rt_uint32_t)&gpsData);
}/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{struct rx_msg msg;rt_err_t result;msg.dev = dev;msg.size = size;result = rt_mq_send(&rx_mq, &msg, sizeof(msg));if (result == -RT_EFULL){/* 消息队列满 */rt_kprintf("message queue full!\n");}return result;
}static void serial_thread_entry(void *parameter)
{struct rx_msg msg;rt_err_t result;rt_uint32_t rx_length;static char rx_buffer[RT_SERIAL_RB_BUFSZ + 1];while (1){rt_memset(&msg, 0, sizeof(msg));/* 从消息队列中读取消息*/result = rt_mq_recv(&rx_mq, &msg, sizeof(msg), RT_WAITING_FOREVER);if (result == RT_EOK){/* 从串口读取数据*/rx_length = rt_device_read(msg.dev, 0, rx_buffer, msg.size);rx_buffer[rx_length] = '\0';/* 通过串口设备 serial 输出读取到的消息 */rt_device_write(serial, 0, rx_buffer, rx_length);/* 打印数据 */// rt_kprintf("%s\n",rx_buffer);parseNMEA(rx_buffer);}}
}int main(void)
{static char msg_pool[256];char str[] = "hello RT-Thread!666\r\n";/*动态创建邮箱*/uart_gps_mail = rt_mb_create("uart_gps", 1024, RT_IPC_FLAG_FIFO);/* 查找串口设备 */serial = rt_device_find(SAMPLE_UART_NAME);if (!serial){rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);}/* 初始化消息队列 */rt_mq_init(&rx_mq, "rx_mq",msg_pool, /* 存放消息的缓冲区 */sizeof(struct rx_msg), /* 一条消息的最大长度 */sizeof(msg_pool), /* 存放消息的缓冲区大小 */RT_IPC_FLAG_FIFO); /* 如果有多个线程等待,按照先来先得到的方法分配消息 *//* 以 DMA 接收及轮询发送方式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_DMA_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_input);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);rt_thread_t lcd_th = rt_thread_create("lcd", lcd_show, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL && lcd_th != RT_NULL){rt_thread_startup(thread);rt_thread_startup(lcd_th);}else{rt_kprintf("Create %s Entry failed!\n", SAMPLE_UART_NAME);}return RT_EOK;
}这篇关于RTOS(ENV)串口DMA接收GPS数据并解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





