本文主要是介绍【智能算法应用】灰狼算法GWO求解三维路径规划问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1.算法原理
- 2.三维路径规划数学模型
- 3.结果展示
- 4.参考文献
- 5.代码获取
1.算法原理
【智能算法】灰狼算法(GWO)原理及实现
2.三维路径规划数学模型
三维地形可以等效处理成山峰地形,数学模型为:
z ( x , y ) = h 0 + ∑ j = 1 N h j max ⋅ exp { − [ k j x ⋅ ( x − x j max ) x j max ] 2 − [ k j y ⋅ ( y − y j max ) y j max ] 2 } (1) \begin{aligned}&z(x,y)=h_0+\sum_{j=1}^Nh_j^{\max}\cdot\exp\left\{-\left[\frac{k_j^x\cdot(x-x_j^{\max})}{x_j^{\max}}\right]^2-\left[\frac{k_j^y\cdot(y-y_j^{\max})}{y_j^{\max}}\right]^2\right\}\end{aligned}\tag{1} z(x,y)=h0+j=1∑Nhjmax⋅exp⎩ ⎨ ⎧−[xjmaxkjx⋅(x−xjmax)]2−[yjmaxkjy⋅(y−yjmax)]2⎭ ⎬ ⎫(1)

其中,h0 为基准地形高度,N 表示山峰数量。x , y 依次是水平投影面上的点的横、纵坐标,z 则是该水平面坐标点所对应的地形高度。
设航迹的起始点为Ps,终点为Pf ,将航迹的起始点和终点的连线沿 x 轴方向进行 n +1等分,等分点为 xi ,相对应的航迹点 Pi 坐标为(xi,yi,zi) ,避障成本 ϕ \phi ϕ。目标适应度函数可表示为:
f i t n e s s = ∑ i = 1 n + 1 ( x i − x i − 1 ) 2 + ( y i − y i − 1 ) 2 + ( z i − z i − 1 ) 2 + ϕ (2) fitness=\sum_{i=1}^{n+1}\sqrt{(x_i-x_{i-1})^2+(y_i-y_{i-1})^2+(z_i-z_{i-1})^2}+\phi\tag{2} fitness=i=1∑n+1(xi−xi−1)2+(yi−yi−1)2+(zi−zi−1)2+ϕ(2)
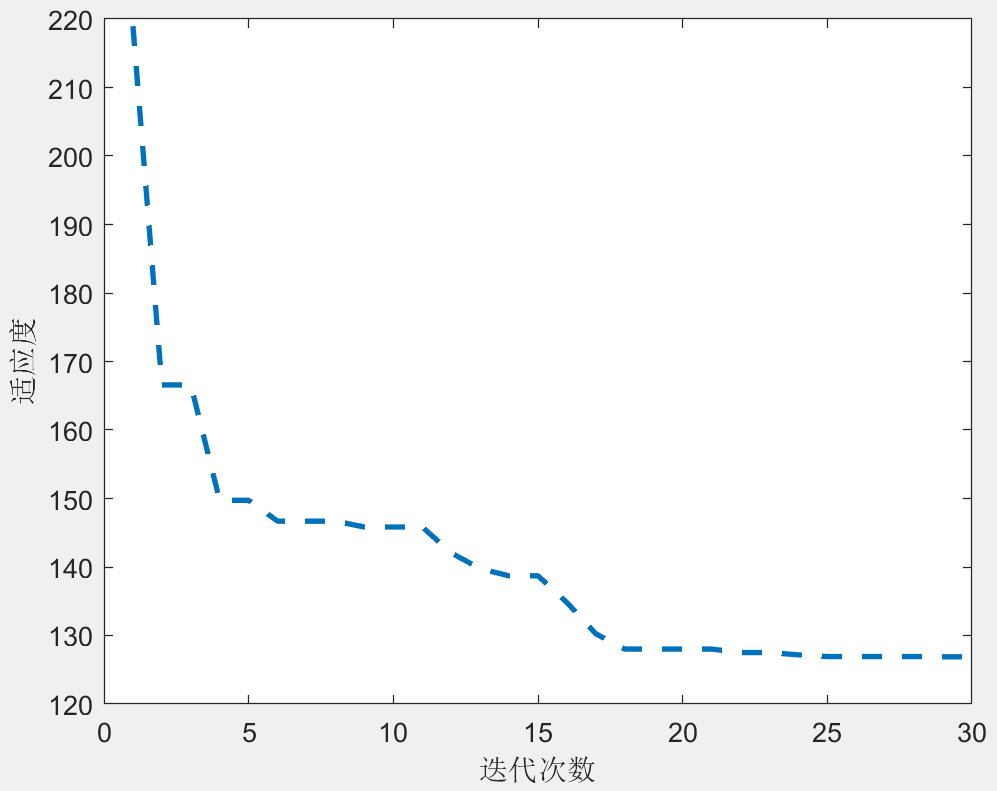
3.结果展示


4.参考文献
[1] 刘永兰,李为民,吴虎胜,等.基于狼群算法的无人机航迹规划[J].系统仿真学报,2015,27(08):1838-1843.
[2] 解瑞云,海本斋.多策略鼠群优化算法的无人机三维航迹规划[J/OL].机械设计与制造,1-8[2024-05-28].
5.代码获取
资源清单
这篇关于【智能算法应用】灰狼算法GWO求解三维路径规划问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









