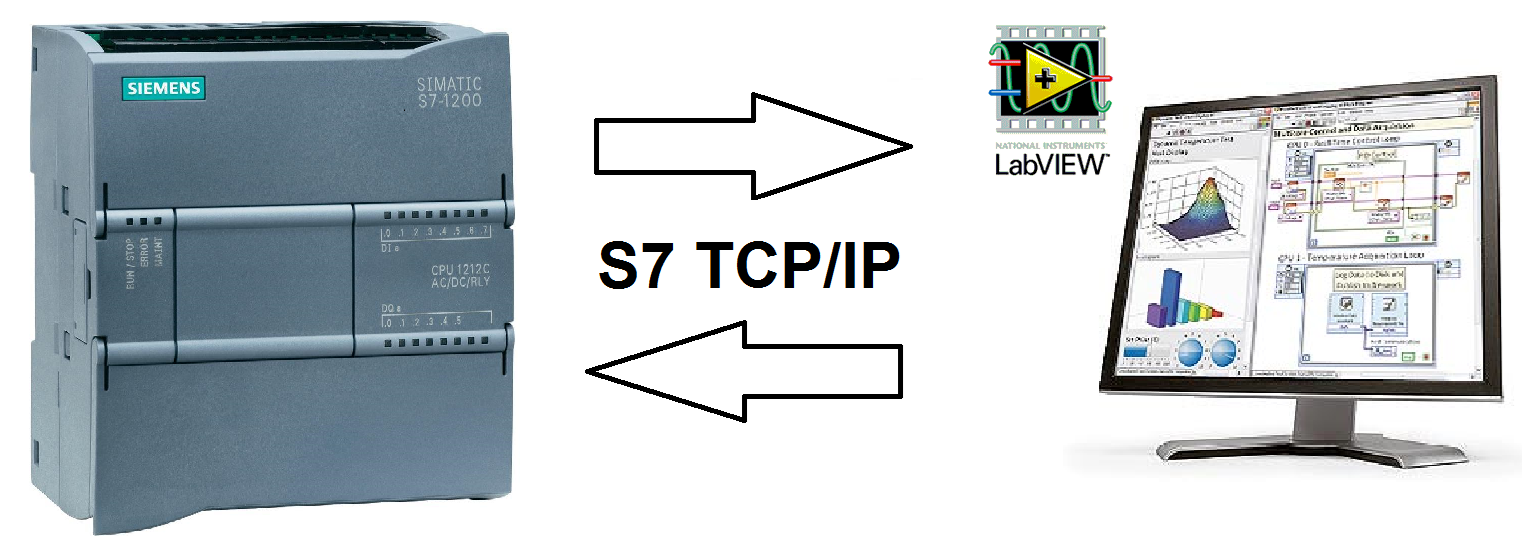
本文主要是介绍LabVIEW通过以太网控制PLC程序开发,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在使用LabVIEW通过以太网控制PLC程序开发时,需要综合考虑硬件、软件和通信协议的协调工作。以下是详细步骤、注意事项、重点和难点分析,以及几种实现方式及其特点的概述。
实现步骤
-
确定硬件和软件环境:
-
确定PLC型号和品牌(如西门子、欧姆龙、施耐德等)。
-
确认PLC支持以太网通信(例如Modbus TCP/IP、Ethernet/IP等)。
-
安装LabVIEW软件及相关的工具包,如LabVIEW DSC模块、NI OPC服务器、NI Modbus库等。
-
-
配置PLC:
-
配置PLC的网络参数(IP地址、子网掩码、网关等)。
-
配置PLC的通信协议(如Modbus TCP/IP或Ethernet/IP)。
-
-
配置LabVIEW:
-
安装和配置所需的LabVIEW模块和驱动。
-
在LabVIEW中创建通信VI,配置TCP/IP连接参数。
-
使用LabVIEW的功能块(如TCP/IP功能块、Modbus功能块)编写控制程序。
-
-
建立通信:
-
使用LabVIEW的TCP/IP或相关协议功能块,与PLC建立连接。
-
发送和接收数据,确保PLC和LabVIEW之间的通信畅通。
-
-
调试和优化:
-
调试通信程序,检查数据传输的正确性和稳定性。
-
优化程序以提高通信效率和可靠性。
-
注意事项
-
协议选择:确保PLC和LabVIEW使用的通信协议一致并兼容。
-
实时性:注意实时性要求,选择适当的通信周期和数据刷新率。
-
网络配置:避免IP地址冲突,确保网络连接稳定。
-
安全性:考虑网络安全问题,如使用防火墙和加密通信等措施。
重点和难点
-
通信协议实现:掌握Modbus TCP/IP或Ethernet/IP协议的具体实现和配置。
-
数据同步与一致性:确保LabVIEW和PLC之间的数据同步和一致性,防止数据丢失或错乱。
-
实时性保证:特别是在高实时性要求的应用场景下,优化通信效率和响应速度。
-
故障处理:处理通信中断、数据丢失等异常情况,并实现相应的恢复机制。
实现方式及特点
-
直接TCP/IP通信:
-
特点:直接使用LabVIEW的TCP/IP功能块进行通信。
-
优点:简单、直观,适用于基本的读写操作。
-
缺点:需要自行处理通信协议的细节,适用范围较窄。
-
-
使用Modbus TCP/IP协议:
-
特点:使用LabVIEW的Modbus库,与支持Modbus TCP/IP的PLC进行通信。
-
优点:标准化协议,广泛支持,较容易实现。
-
缺点:需要了解Modbus协议的具体细节。
-
-
使用OPC(OLE for Process Control)服务器:
-
特点:通过OPC服务器实现LabVIEW与PLC的通信。
-
优点:适用于复杂的工业控制系统,支持多种PLC品牌和型号,易于扩展和维护。
-
缺点:需要配置和维护OPC服务器,可能增加系统复杂性
-
这篇关于LabVIEW通过以太网控制PLC程序开发的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!