本文主要是介绍自适应容积卡尔曼滤波|(自适应CKF)的MATLAB源代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
介绍
容积卡尔曼滤波在理论上拥有比UKF更高的精度和稳定性,本自适应算法通过对观测残差的计算,在观测协方差R不准确或无法获得时,对R进行调节,以起到降低估计误差的作用。
模型
使用的是三维的非线性模型,经过适当修改,可用于组合导航等领域。
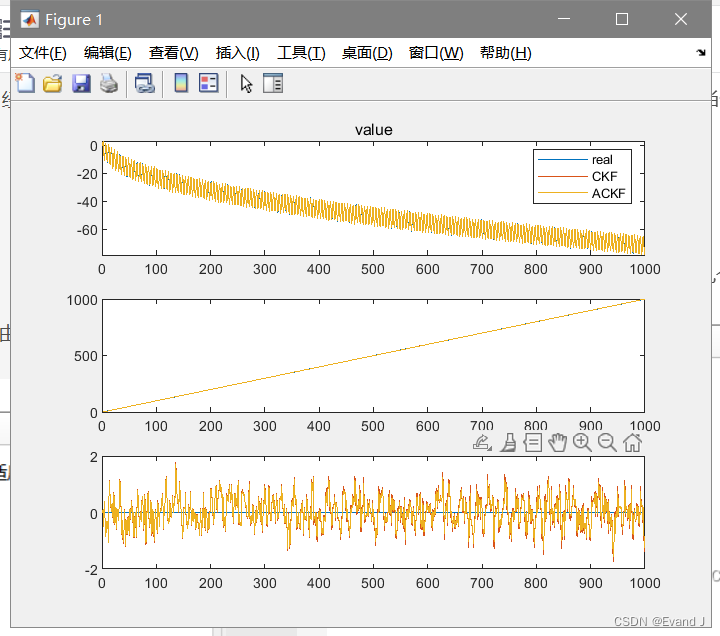
三轴滤波结果如下:
代码组成部分
只有一个m文件,方便运行。由以下几个部分组成:
运行结果
单轴的误差对比:
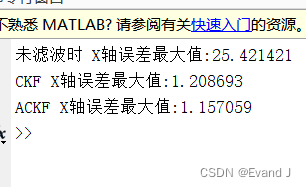
未滤波>CKF>ACKF(A是adaptive,自适应)
三轴误差对比图像:

程序部分代码
给出部分代码,以便读者获取运动模型
% CKF与ACKF效果对比,自适应调节R
% Evand©2024
% 2024-5-26/Ver1/
clear;clc;close all;
rng(0);
%% 滤波模型初始化
t = 1:1:1000;
Q0 = 1*diag([1,1,1]);w=sqrt(Q0)*randn(size(Q0,1),length(t));
R0 = 1*diag([1,1,1]);v=sqrt(R0)*randn(size(R0,1),length(t));
P0 = 1*eye(3);
X=zeros(3,length(t));
X_ekf=zeros(3,length(t));
X_ekf(:,1)=X(:,1);
Z=zeros(3,length(t)); %定义观测值形式
Z(:,1)=[X(1,1)^2/20;X(2,1);X(3,1)]+v(:,1); %观测量
%% 运动模型
X_=zeros(3,length(t));
X_(:,1)=X(:,1);
for i1 = 2:length(t)X(:,i1) = [X(1,i1-1) + (2.5 * X(1,i1-1) / (1 + X(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));X(2,i1-1)+1;X(3,i1-1)]; %真实值X_(:,i1) = [X_(1,i1-1) + (2.5 * X_(1,i1-1) / (1 + X_(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));X_(2,i1-1)+1;X_(3,i1-1)] + w(:,i1-1);%未滤波的值Z(:,i1) = [X(1,i1).^2 / 20;X(2,i1);X(3,i1)] + v(i1); %观测值
end完整代码下载链接
https://download.csdn.net/download/callmeup/89364975
这篇关于自适应容积卡尔曼滤波|(自适应CKF)的MATLAB源代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







