adrc专题

我已经多次看到ADRC(自抗干扰控制)
最开始是看到无名用ADRC 无名似乎17年就开始弄ADRC了 http://www.docin.com/p-2101934503.html ACfly和无名他们确实早就认识 https://blog.csdn.net/wang2012113132/article/details/78935444?utm_medium=distribute.pc_re
自抗扰控制理论(四)ADRC控制串级系统
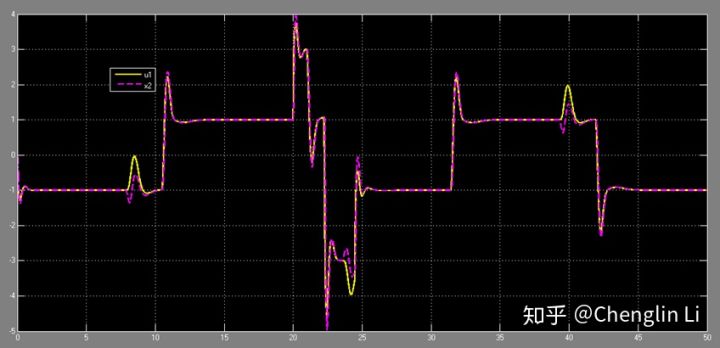
刚刚优酷里面看到一个用串级ADRC弄无人机的视频 https://v.youku.com/v_show/id_XNDA5MTY5ODQxNg==.html 摘自:https://zhuanlan.zhihu.com/p/115344982 自抗扰控制理论(四)ADRC控制串级系统 Chenglin Li 厦门大学 飞行器设计硕士在读 1 概念 用控制量u驱动其中

开源飞控ACFLY:ADRC安排过渡过程
摘自:https://blog.csdn.net/weixin_40767422/article/details/87651614 开源飞控ACFLY:ADRC安排过渡过程 置顶 ACFLY开源飞控 2019-02-24 13:05:39 3466 收藏 13 分类专栏: ADRC自抗扰控制 文章标签: ADRC 自抗扰控制 过渡过程 ACFLY 跟踪微分器 版权

开源飞控ACFLY:ADRC离散系统最速控制综合函数的理解
摘自:https://blog.csdn.net/weixin_40767422/article/details/86709848 ACFLY原创文章,转载请说明出处https://blog.csdn.net/weixin_40767422/article/details/86709848 ADRC相关论文资料请加q群:180319060下载 最近在看韩京清教授的自抗扰论文,里面关于最速

我对ADRC的一些整理(很多来自其他博客)
ADRC控制中包含三个主要的部分: 跟踪微分器,非线性状态反馈(非线性组合),扩张观测器。 https://blog.csdn.net/sinat_16643223/article/details/107857559 他这里让我很好理解了跟踪微分器 话说PID不是有微分先行的PID么,起到的作用是不是和这里的跟踪微分器类似?这是我在看一个硕士论文时发现的

无名的飞控默认是用的PID,没用ADRC,可以改变宏定义切换。而且只在角速度环用ADRC。
看了下代码,默认是PID模式,所以实际那飞的效果是PID。 而且从它这宏定义看书,无名只是把ADRC用在角速度环上面,角速度环的控制可以用ADRC或者PID。 我是怎么一步步找到那的呢,先找到main.c 这里说 主要核心:传感器滤波、姿态解算、惯导、控制等代码在TIME.c里面运行 那就找到time.c 可以看到最关键的一段,把整个控制算法都

无名的ADRC的具体方案
https://v.youku.com/v_show/id_XMzMyOTMwNTMwOA==.html?spm=a2hzp.8253869.0.0 最开始只是在角速度环上ADRC,角度环实际只用个p 现在看代码似乎也是只在角速度环用ADRC,可以结合我这篇博文看 https://blog.csdn.net/sinat_16643223/article/details/10889133
ADRC自抗扰控制原理
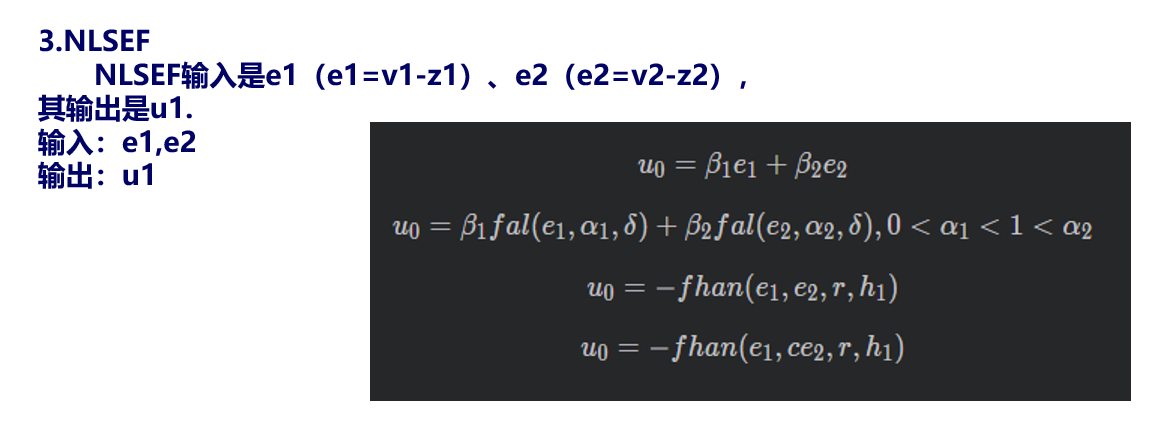
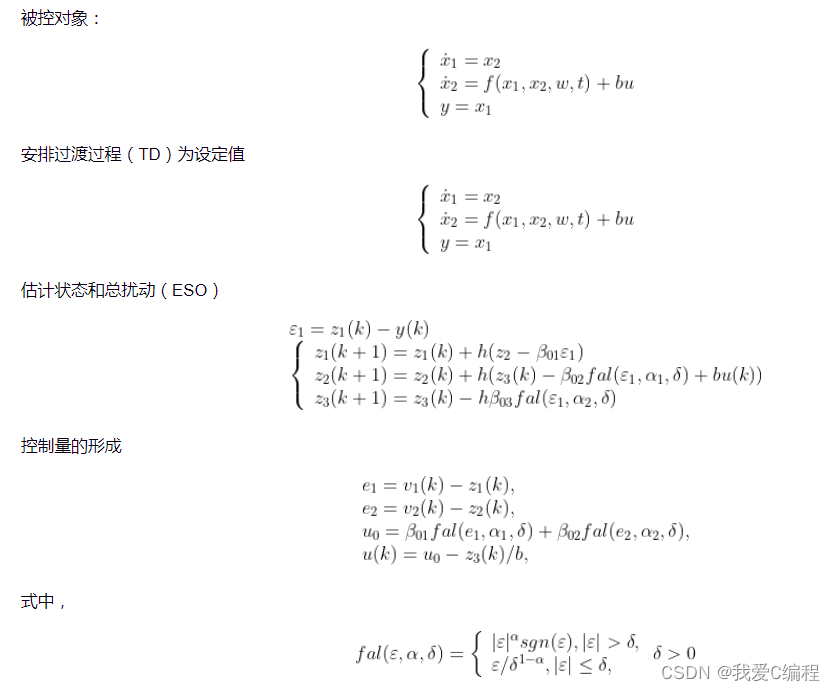
这里写目录标题 TD跟踪微分器ESONLSEF后续把公式的核心原理分析一下 参考链接:ADRC自抗扰控制,有手就行 ADRC是升级版的PID,由TD(跟踪微分器),ESO(扩张状态观测器),NLSEF(非线性控制律)。 其中TD主要是为了防止目标值突变而安排的过渡过程,ADRC的灵魂在于ESO,NLSEF则是改良PID直接线性加权(输出=比例+积分+微分)而引进的非线性
【自抗扰控制ADRC】扩张观测器ESO
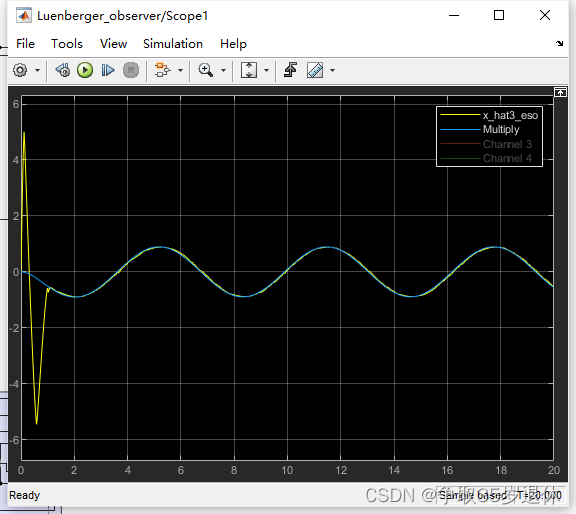
传送门 前言线性状态观测器龙伯格观测器 非线性状态观测器扩张状态观测器(ESO) 前言 扩张观测器ESO也属于状态观测器中的一种,因此在对ESO展开推导描述前,会以循序渐进的方式引出线性观测器等内容,最后再衍生出对ESO的描述和推导。 线性状态观测器 对于一个线性状态方程而已,它的输出不一定能够完全呈现所有状态变量,这就涉及到关于系统状态方程的可观测性。对于以下的状态方程
基于ADRC自抗扰控制器的simulink仿真,ESO和TD等模块使用S函数开发
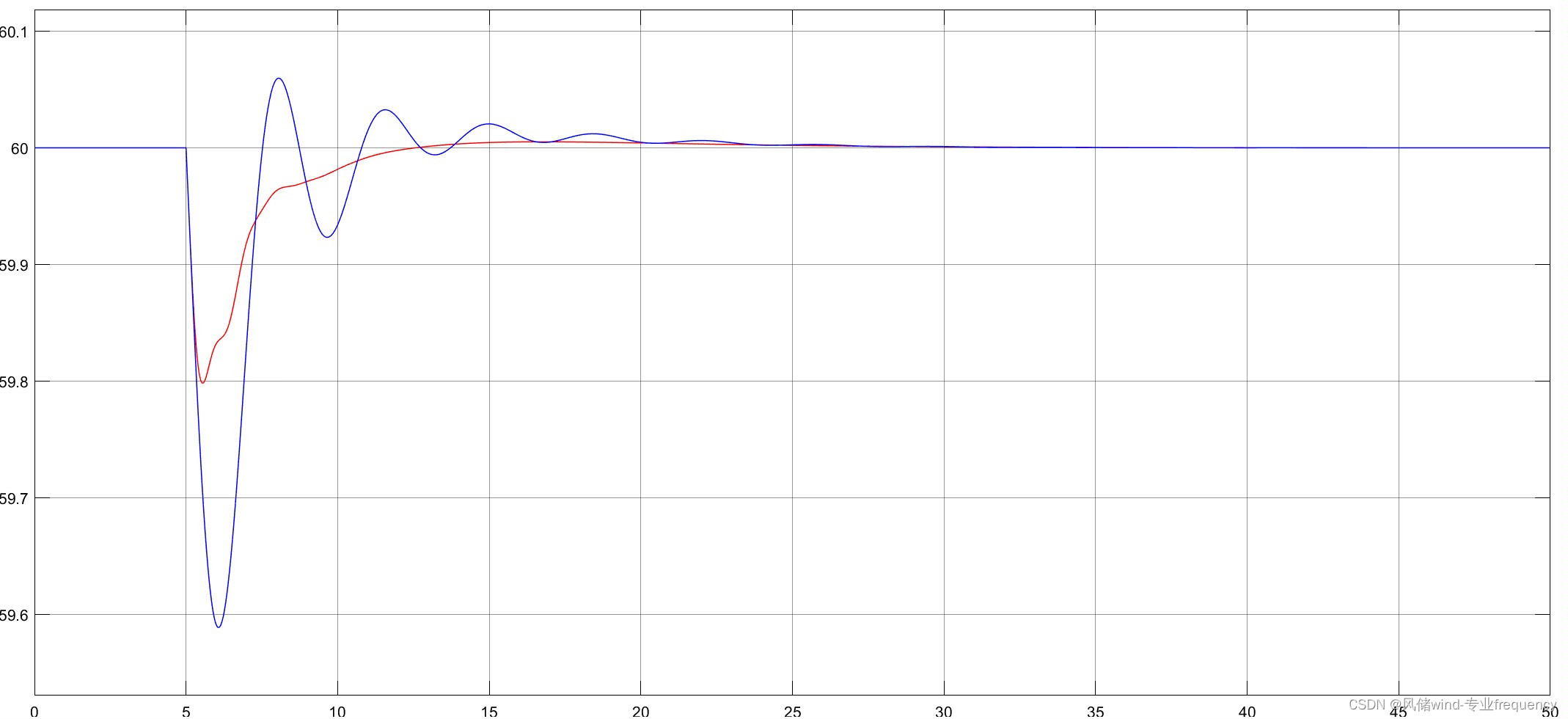
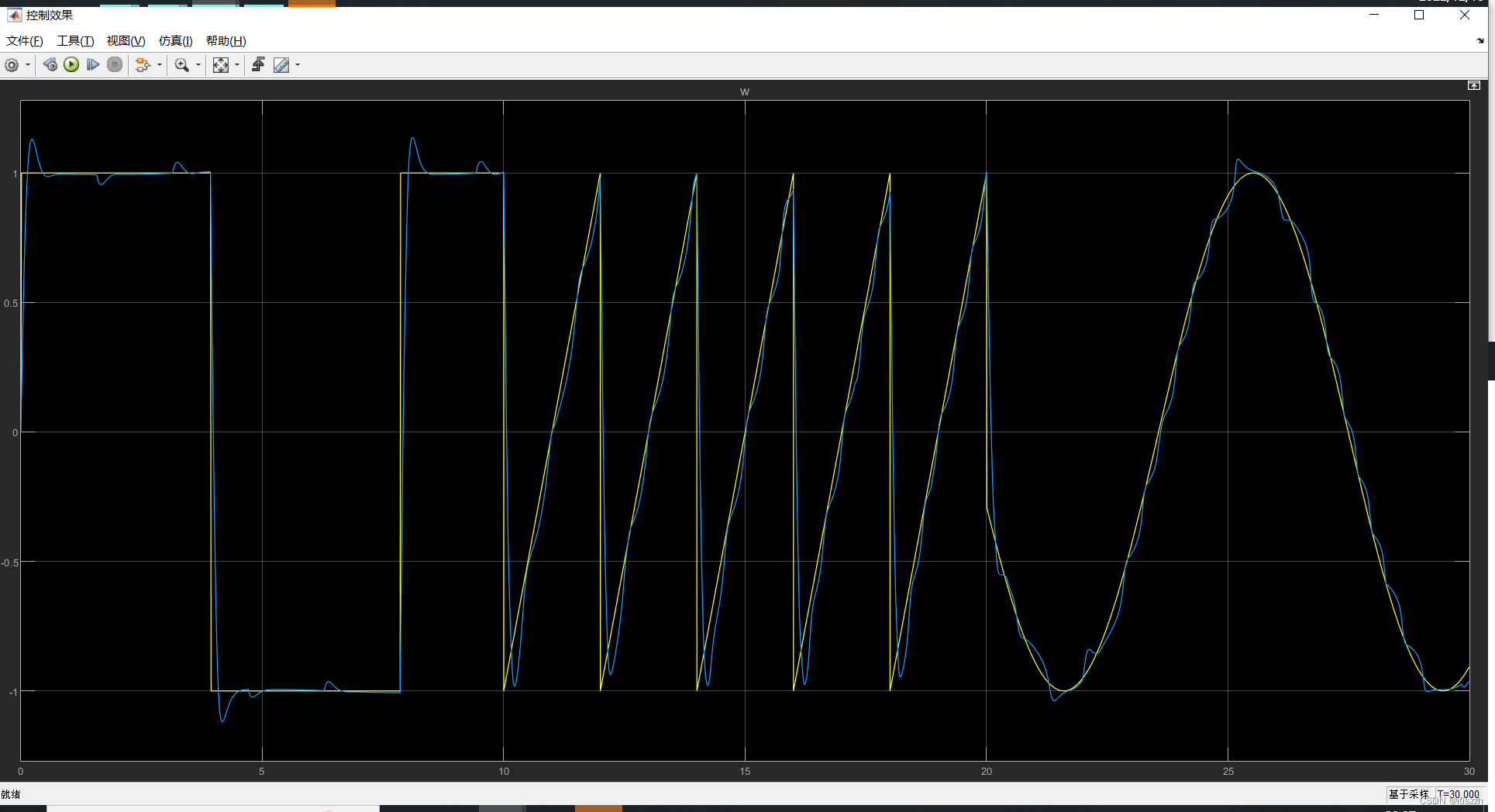
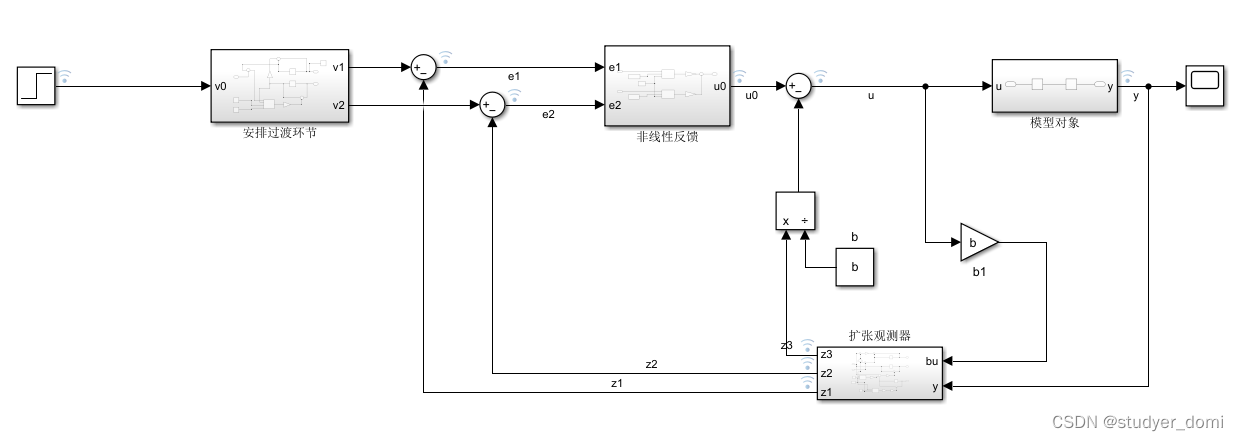
目录 1.算法仿真效果 2.MATLAB核心程序 3.算法涉及理论知识概要 4.完整MATLAB 1.算法仿真效果 matlab2022a仿真结果如下: 2.MATLAB核心程序 ..................................................function [sys,x0,str,ts] = mdlInitialize
ADRC——一阶ESO扩张状态观测器simulink实现及C语言代码
理论部分见我之前的博客,一阶ESO相比起来实现更简单,也更好理解,可帮助新手入门使用。虽然常见的物理系统,绝大多都是二阶系统,如F=ma, 做位置控制时,一般用二阶ESO。但是一阶ESO也有一定的用途,后面有空把之前做的一阶ESO的实际案例开源出来。 simulink模型已上传网盘 链接:https://pan.baidu.com/s/1q7zgYNjGXXrAHaaPCSZq

【2021研电赛】基于ADRC的双轴反作用轮自平衡杆
本作品介绍参与极术社区的有奖征集|分享研电赛作品扩大影响力,更有重磅电子产品免费领取! 论文题目: 基于ADRC的双轴反作用轮自平衡杆 Dual-axis reaction wheel self-balancing rod based on ADRC 参赛单位: 广西科技大学 队伍名称: 平衡空间 指导老师: 文家燕 参赛队员: 温林荣、陈家宝、闻海潮 完成时间: 2021.6.19
matlab simulink ADRC控制样例
1、内容简介 略 3-可以交流、咨询、答疑 2、内容说明 用adrc控制传递函数,保证输出达到预期 ADRC控制器、传递函数 3、仿真分析 4、参考论文 略
ADRC学习(1)系统在调节过程中安排过渡过程的作用
1.二阶系统的调节过程 考虑对于如下所示的二阶系统 { x ¨ = − a 1 ( x − v 0 ) − a 2 x ˙ y = x (1.1) \begin{cases} \ddot{x} = -a_1 (x - v_0) - a_{2} \dot{x}\\ \tag{1.1} y = x \end{cases} {x¨=−a1(x−v0)−a2x˙y=x(1.1) 输入单位阶跃信