陀螺仪专题
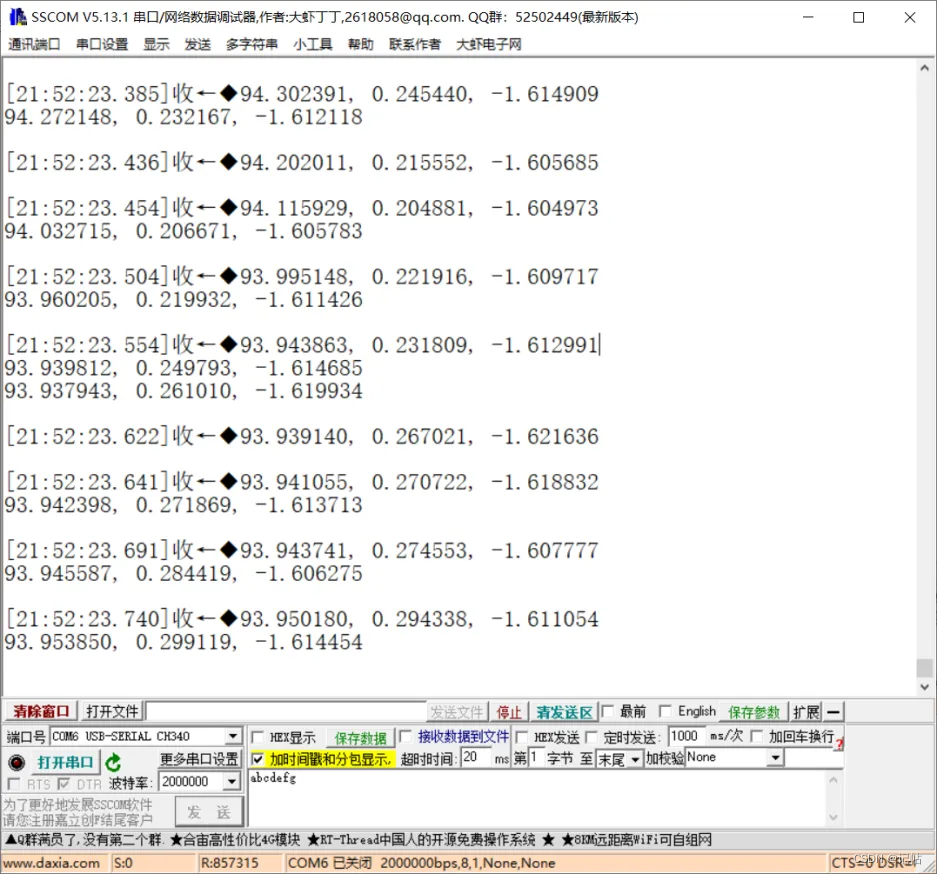
陀螺仪LSM6DSV16X与AI集成(8)----MotionFX库解析空间坐标
陀螺仪LSM6DSV16X与AI集成.8--MotionFX库解析空间坐标 概述视频教学样品申请源码下载开启CRC串口设置开启X-CUBE-MEMS1设置加速度和角速度量程速率选择设置FIFO速率设置FIFO时间戳批处理速率配置过滤链初始化定义MotionFX文件卡尔曼滤波算法主程序执行流程lsm6dsv16x_motion_fx_determin欧拉角简介演示 概述 本文将探讨

陀螺仪LSM6DSV16X与AI集成(7)----FIFO数据读取与配置
陀螺仪LSM6DSV16X与AI集成.6--检测自由落体 概述视频教学样品申请源码下载主要内容生成STM32CUBEMX串口配置IIC配置CS和SA0设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置设置量程设置FIFO水印设置速率使用流模式设置FIFO时间戳批处理速率使能时间戳FIFO状态寄存器演示 概述 LSM6DSV16X是一款高性能、低功耗的6轴IMU传感器,集成
MEMS六轴陀螺仪工作原理介绍
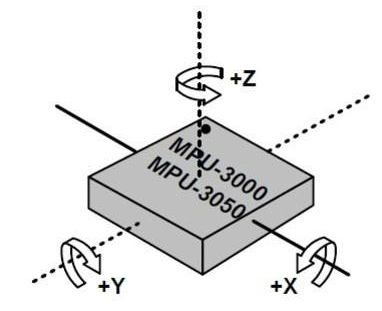
MEMS(微机电系统)六轴陀螺仪主要包括三轴陀螺仪和三轴加速度计,以下是其工作原理的简要介绍: 三轴陀螺仪工作原理: 陀螺仪利用科里奥利力原理来测量角速度。它通常有一个可振动的质量块,当物体绕着某个轴旋转时,质量块在旋转坐标系中会受到科里奥利力的作用而产生位移或振动。通过检测这种位移或振动的变化,就可以测量出相应轴上的角速度。每个轴上

【PX4-AutoPilot教程-TIPS】PX4加速度计陀螺仪滤波器参数设置
PX4加速度计陀螺仪滤波器参数设置 前期准备滤波前FFT图滤波后FFT图 环境: 日志分析软件 : Flight Review PX4 :1.13.0 前期准备 进行滤波器参数设置的前提是飞机简单调试过PID已经可以稳定起飞,开源飞控的很多默认参数是可以让飞机平稳起飞的。 修改参数SDLOG_PROFILE,勾选High rate选项。以最大频率来记录数据,这就方便我们

SGPM02陀螺仪模块通过惯性导航助力AGV小车的发展
之前我们介绍过SGPM01系列陀螺仪模块在智能泳池清洁机器人导航的方案(SGPM01)。这款惯性导航模块收到了许多企业的欢迎。由此,爱普生推出了SGPM02系列陀螺仪模块通过惯性导航,助力AGV小车的发展。 AGV是一种用于运输材料的无人驾驶车辆,并且AGV是复杂的机器。它代表了一个完整的系统、物料处理解决方案,在
解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法:1.零位校准(Zero Calibration):陀螺仪在使用前可以进行零位校准,即在没有角速度输入时,将测量值归零。通过定期进行零位校准,可以减少角度漂移的影响。2.温度补偿(Temperature Compensation):陀螺仪的性能受环境温度的影响较

MEMS 陀螺仪资料整理之《MEMS 陀螺仪简介及其应用》
一、MEMS是什么? MEMS是英文MicroElectro Mechanical systems的缩写,即微电子机械系统。微电子机械系统(MEMS)技术是建立在微米/纳米技术(micro/nanotechnology)基础上的 21世纪前沿技术,是指对微米/纳米材料进行设计、加工、制造、测量和控制的技术。它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。这种微电子机械系
用于割草机器人,商用服务型机器人的陀螺仪
介绍一款EPSON推出适用于割草机器人,商用服务型机器人的高精度陀螺仪模组GGPM61,具体型号为GGPM61-C01。模组GGPM61是一款基于QMEMS传感器的低成本航向角输出的传感器模组,它可以输出加速度、角速度及姿态角等信息,为控制机器人运动提供了精准的姿态信息。已广泛应用于商场、酒店、医院及银行等各大公共场所中提供各种不同类型的服务,为人民的出行生活带来了极大的便利。GGPM61-C01

用于自动化机器陀螺仪传感器:XV7081BB
介绍一款用于自动化机器的数字输出型陀螺仪传感器XV7081BB。这款新推出的陀螺仪XV7081BB到底有什么魅力呢?我们可以用常用款用于智能割草机的XV7011BB作对比:XV7081BB提供16位或24位分辨率的角速率输出速率范围为+400°s。而XV7011BB采用16位角速度输出,检测范围为+100°/s。这么一比较差距就出来了,而且XV7081BB具有出色的偏置温度系数,典型值0.0024
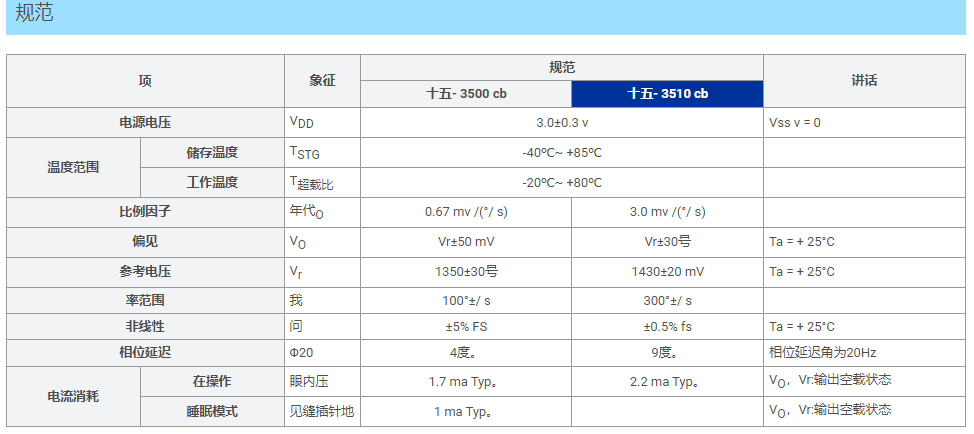
EPSON陀螺仪传感器XV-3510CB
自主精密农业机械、智能施工机械和无人机应用的快速发展,以及工作环境的恶劣和空间的逼仄,对于小型陀螺仪传感器的需求与日俱增。在这种环境之下,爱普生(EPSON)推出了陀螺仪传感器--XV-3510CB。 产品外观 1.首先便是非常小巧的封装尺寸:XV-3510CB采用了超小的SMD封装尺寸,为5.0x3.2x1.3mm。这种小巧的尺寸使得它非常适合于空间受限的应用环境,如移动设备、小型机器人

用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G370
用于自动驾驶,无人驾驶的IMU惯导模块六轴陀螺仪传感器:M-G370。自2020年,自动驾驶,无人驾驶已经迎来新突破,自动驾驶汽车作为道路交通体系的一员,要能做到的就是先判断周边是否有障碍物,自身的行驶是否会对其他交通参与成员产生危险。这就需要所谓的定位导航。而定位导航的关键就在于汽车中的IMU惯导模块。那么为什么说惯导模块是自动驾驶,无人驾驶的安全防线呢?什么样的惯导模块用于自动驾驶和无人驾驶是

用于AGV物流机器人的爱普生陀螺仪传感器XV7000系列
适用于AGV物流机器人的爱普生陀螺仪传感器XV7000系列:XV7001BB,XV7011BB。以前我们都知道XV7001BB,XV7011BB适用于扫地机器人,其实对于AGV物流机器人来说,XV7000系列生陀螺仪传感器也是其中重要一环。AGV机器人又叫做AGV搬运机器人或AGV小车。随着物联网、大数据和移动应用等信息技术的快速发展,“机器人换人”正逐步在制造业实施,AGV机器人正在制造业的物料

树莓派串口读取陀螺仪ky9250(mpu9250)数据
9轴姿态角度传感器,其中ky9250陀螺仪由于自带卡尔曼动态滤波算法方便用户使用。ky9250陀螺仪基本可以在各个平台上进行数据的读取(如stm32\arduino\C#\Matlab\树莓\Unity3d\python\ROS\英飞凌\Nvidia jetson linux 等) 1、树莓派和ky9250的接线方式 树莓派和ky92509250的模块(VCC对3V3,RX对TX,
爱普生M-G365/M-G366 MEMS六轴陀螺仪替代光纤陀螺仪
爱普生M-G365/M-G366是一款性能达到光纤陀仪(FOG)级别的高性能性测量装置,作为新一代IMU标准,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器的高速DSP能以较低功耗提供高精度实时姿态角输出(横滚角/俯仰角/偏航角),可广泛适用于汽车等车辆、船只及其他多种工业产品和系统。用来测量数据和控制运动等,而且系统端不再需要动态姿态角的高速计算,从而减小了系统载荷和功

iPhone 4陀螺仪和方向感應器
http://blog.csdn.net/lijing_hi/article/details/7252954# 首先我们来看看陀螺仪传感器和加速度传感器都是用来做什么的。 陀螺仪芯片 陀螺仪传感器最终输出的是什么样的数据呢?是运动轨迹。 而加速度传感器输出的又是什么样数据呢?是角度。 有了这两个作为基础,接下来我们来看看,为什么会把陀螺仪跟角度联系到一起呢?
IOS -- 加速计、陀螺仪
加速计是用来检测手机受到的加速度的大小和方向的,而手机静置的时候,只受到重力加速度,所以很多人又把加速计功能称为重力感应功能。 加速计的强项在于测量设备的重力方向。但是对于运动过程中的受力情况就无法准确地识别。所以对于运动过程中的方向感应,我们使用陀螺仪。 iPhone提供了内置的加速计,也叫方向感应器,是通过感知特定方向的惯力总量,测量出加速度和重力的,是IOS很重要的特色功能之

如何用UNITY3D编写陀螺仪控制器
如何用编写陀螺仪控制器 陀螺仪为开发者提供了各种各样令人兴奋的控制变化。但当涉及到相机控制器的集成和实现时,会发生很多奇怪和神奇的事情。开发人员必须处理不同的设备导向,初始相机位置,当然还有四元数。我很高兴分享我的经验,并描述我们如何在Heyworks中解决这些问题。希望这能帮助那些第一次使用陀螺仪的人减轻工作和辛苦。 在我的例子中,我想演示如何在摄像机控制器中实现以

Android+vuforia+unity开发手机添加陀螺仪效果后,模型总是出现在北方
公司做一个效果,unity+vuforia进行的开发,但是开发过程中遇到一个问题,加上陀螺仪之后,模型的位置总是出现在北方,然后我就一直尝试着修改陀螺仪的代码,但是网上查了好多帖子,怎么修改都不行,后来就换了一个思路,查了一下vuforia是否能进行配置实现陀螺仪效果,结果还真有,就配置一个参数就可以,有时候还是得转换一下思路,下面就是vuforia配置的地方 把 World Center

加速计_陀螺仪_磁力计
在Build Phases 下的Link Binary With Libraries (1 item)中加入 CoreMotion.framework文件包 #import "ViewController.h"#import <CoreMotion/CoreMotion.h>@interface ViewController ()@property(nonatomic, strong)UI
Android使用陀螺仪
Android使用陀螺仪 陀螺仪基础运用与理解 在Android应用中使用陀螺仪可以帮助实现各种功能,比如游戏控制、虚拟现实体验、运动追踪等。以下是使用Android陀螺仪的基本步骤: 获取传感器服务: 首先,需要获取设备上的陀螺仪传感器服务。可以通过SensorManager类来获取。 注册监听器: 使用SensorManager注册一个陀螺仪传感器监听器,以便获取传感器数据。监听器会

姿态传感器MPU6050模块之陀螺仪、加速度计、磁力计
MEMS技术 微机电系统(MEMS, Micro-Electro-Mechanical System),也叫做微电子机械系统、微系统、微机械等,指尺寸在几毫米乃至更小的高科技装置。微机电系统其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。 微机电系统是在微电子技术(半导体制造技术)基础上发展起来的,融合了光刻、腐蚀、薄膜、LIGA、硅微加工、非硅微加工和精密机械加工等技术制作的高科技电

三轴陀螺仪与加速度计如何辅助Iphone定位
原文地址:http://www.aiw3.com/iphone/0520987.html 三轴陀螺仪与加速度计如何辅助Iphone定位 三轴陀螺仪与加速度计如何辅助Iphone定位内容导读: 去年的6月8日,伟大的苹果公司发布了最新一代iPhone 4G,这款新机器有很多硬件方面的升级,其中对游戏玩家来说来说,最大的一个“三轴陀螺仪”!... 去年的6月8日,

加速度计与陀螺仪数据融合解算姿态
加计和陀螺仪都能计算出姿态,但为何要对它们融合呢,是因为加速度计对振动之类的扰动很敏感,但长期数据计算出的姿态可信,而陀螺仪虽然对振动这些不敏感,但长期使用陀螺仪会出现漂移,因此我们要进行互补,短期相信陀螺,长期相信加计。不过,其实加计无法对航向角进行修正,修正航向角需要磁力计,也就是下次要总结的9轴数据融合。 在融合之前先要对传感器原始数据进行一些处理。理想情况下,加速度计水平放置时,XY轴应

Unity3D基于陀螺仪实现VR相机功能(转)
转至https://blog.csdn.net/m0_37998140/article/details/78255978?utm_source=blogxgwz7 Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下: 打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图: 代码如下: using Un

Unity3D基于陀螺仪实现VR相机功能
Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下: 打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图: 代码如下:using UnityEngine;using System.Collections;public class GyroController : MonoBehaviour{