速腾专题

速腾32线激光雷达使用方法
速腾32线激光雷达 + 12V电源 + 实体机ubuntu22.04 + ROS2-humble 一、软件安装 mkdir robosense_wscd robosense_wsmkdir src && cd src/git clone https://github.com/RoboSense-LiDAR/rslidar_msg.gitgit clone https://githu
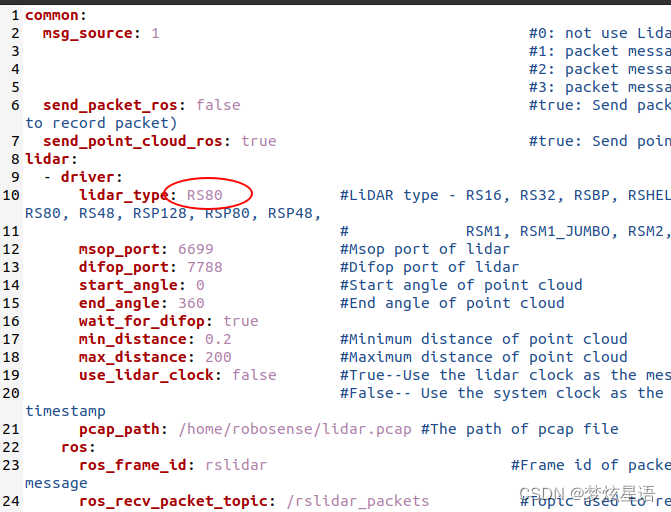
ubuntu20.04 ROS 环境下使用速腾80线激光雷达
1.相关系统环境 系统版本:ubuntu 20.04 ROS版本:ROS1 - noetic 激光雷达型号:RoboSense Ruby (更新于2024.5.14) 2.网口配置: 将PC/工控机的网口配置为: ipv4,方式设置为手动 ip地址、掩码以及网关设置成下图 可以ping雷达的IP地址,我的是192.168.1.200 $ ping 192.168.1.200 出现以

Dora-rs 机器人框架学习教程(4)——速腾激光雷达驱动
文章目录 1、rslidar 雷达官方驱动2、rslidar dora 框架驱动2.1 驱动代码2.2 编译rslidar驱动2.3 编写rslidar_test.yml文件2.4 启动节点 3、rslidar Debug节点3.1 新建调试程序3.2 启动节点 参考资料 目标:编写一个C++节点读取速腾雷达数据。 程序的基本思路是新建一个C++ dora节点,在该节点中调用rsl

速腾聚创IPO:增加刚需性、提升附加值,激光雷达下阶段的竞争主题?
长江后浪推前浪,这句话放在激光雷达行业最适合不过了。 作为激光雷达的发明者,六年前占据全球激光雷达市场约70%份额的Velodyne,如今已经退出舞台。全球首个车规级激光雷达量产企业Ibeo也在去年启动破产程序。昔日英雄黯然离场,一批国内车载激光雷达新锐却踏上第一波量产浪潮,冲刺IPO。 近日,激光雷达企业速腾聚创正式递交港股上市申请,摩根大通、华兴资本为其联席保荐人。这是继禾赛科技今年2月成

RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示
在学习ROS的cartographer建图时,基本都是仿真去实现的。近期公司项目有采购一个RoboSense(速腾)16线激光雷达,尝试接入激光雷达,在windows及Ubuntu18+ROS melodic下展示实时数据,并成功建图,现将实践历程分享记录在此。 一. 使用RSView工具实时展示RoboSense16的雷达数据 首先分享RoboSense16激光雷达相关资料,其中包括用户手册

基于ROS的Mako相机,Basler相机,禾赛激光雷达,Velodyne激光雷达,速腾激光雷达,Delphi毫米波雷达安装驱动,运行与调试教程
把大象放冰箱分为几步?三部,那么我们对传感器进行安装调试分为几步?答案也是三步。 第一步,安装驱动 第二步,运行ROS代码 第三步,调试效果 用到的传感器型号与官网如下: 传感器型号官网Basler相机GiE ace 1920-50gchttps://www.baslerweb.com/cn/Mako相机G-192Chttps://www.alliedvision.com/cn/禾赛激光雷达p