软体专题

实战篇(一):软体2D模拟详解
import java.util.ArrayList;import com.thomasdiewald.pixelflow.java.DwPixelFlow;import com.thomasdiewald.pixelflow.java

Aigtek:介电弹性体高压放大器在软体机器人研究中的应用
近年来软体机器人的研究成为目前机器人研究领域的热点,由于软体材料的自由度可以根据需求自由变化,因此软体机器人有着极高的灵活性,而且软体机器人因其材料的柔软性有着很好的人机交互性能和安全性。它的出现成功解决了传统的刚性机器人人机交互性不足,适用范围窄的问题。今天Aigtek安泰电子将就介电弹性体高压放大器在软体机器人研究中的应用进行介绍。 同时软体机器人还可以完成一些非规律型的工作
Unity实现布料效果(软体效果)
原理 很好奇糖豆人这种软体效果是怎么实现的,于是查看了一些资料了解到可以通过改变mesh来使物体产生不一样的渲染效果。 主要通过类似弹簧的效果,点击物体后改变该物体的vertices,某个点离施力点越近则给它的初速度越大。初速度根据该点移动的距离慢慢减小,当减小为0后再次反弹至原点。 实现 外部接口为AddForce函数 using UnityEngine;public class
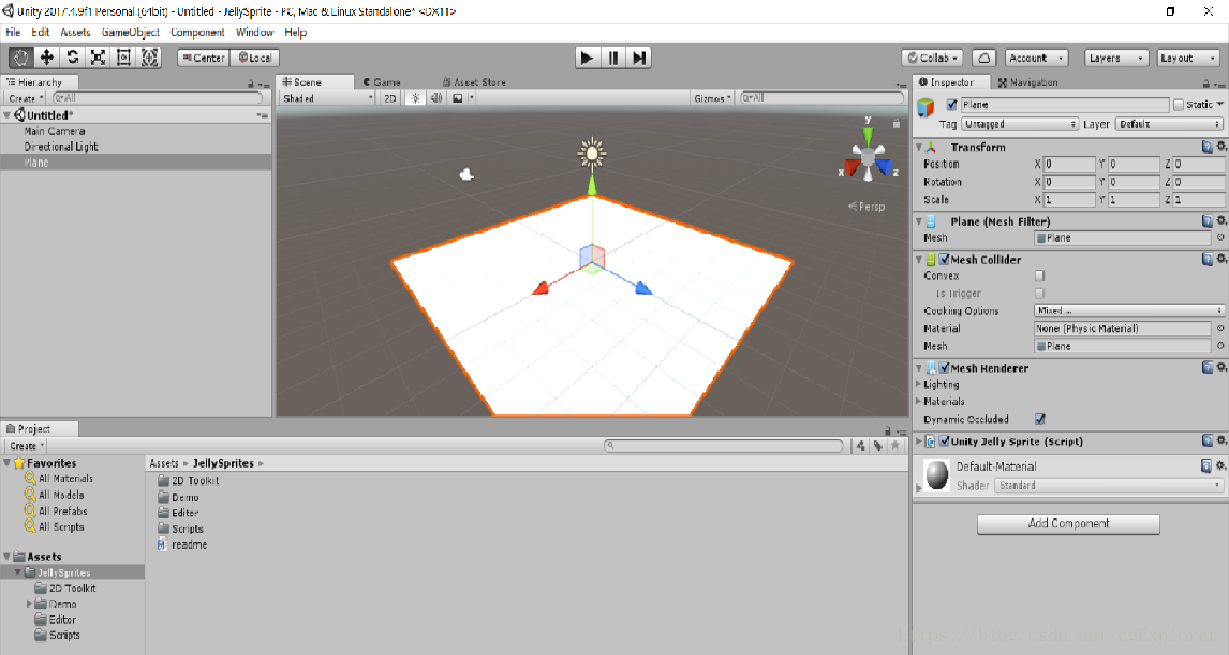
unity软体控制详解(1)——2D软体控制JellySprite使用
最近在网上看到了三个比较有趣的unity插件,分别是2d软体控制JellySprite、3d软体控制PSoftBody、变形控制Mega。本章主要讲解JellySprite插件。其实所有软体的实现都是基于刚体,想象在一个物体里面放很多刚体,物体运动的时候带动刚体运动,刚体之间相互碰撞运动带动所影响物体的区域运动,这样看物体的时候就像是一个软体,而2d的软体就相当于在一张图片中放置很多刚体,举例创建

多模态系统下软体机械手对多种意图的精准实时控制
脑机接口(BCI)技术在运动康复中表现出广泛的潜力,主要依靠神经可塑性来恢复运动功能并改善中风患者术后的生活质量。不过一般单纯依靠EEG信号输入的BCI系统通常很难自然地实时传达多任务软体机器人所需的各种控制命令。而多模态人机界面系统(mHMI),集合眼电信号(EOG)、脑电图(EEG)和肌电图(EMG)的特征来生成多维控制指令,有助于构建更友好、人性化的BCI辅助系统,帮助残疾人及运动障碍患
高压放大器在软体机器人领域的应用
软体机器人是一种新型机器人技术,与传统的硬体机器人有着很大的不同。软体机器人通常由柔软的材料制成,具有高度的柔韧性和灵活性,并且可以实现多种形状和动作。但是,软体机器人的发展面临很多技术挑战,其中之一就是控制系统的设计和优化。在软体机器人领域的研究中,高压放大器起到了非常重要的作用。 图:软体机器人 软体机器人的控制系统需要确保机器人能够协调和控制其柔性材料的形状和动作,以实现