话题专题

最核心的 ICT 产品与技术话题,干货云集,让你不虚此行
7 月 27 日,Cloud Insight Conference 2018 就要和大家见面了,除了新品发布与科技、创新的前沿话题之外,还将与参会者共同探讨最核心的 ICT 产品与技术话题:超融合与软件定义存储、容器与企业微服务治理、多云管理与应用云化、SDN & SD-WAN、全栈 ICT 服务助推企业构建『双核心』全模云等。 我们隆重邀请到来自政府、金融、教育、物流、制造、零售、医疗、能源等
【话题】提升开发效率的秘密武器:探索高效编程工具
目录 哪个编程工具让你的工作效率翻倍? 引言 方向一:工具介绍 方向二:效率对比 方向三:未来趋势 哪个编程工具让你的工作效率翻倍? 在日益繁忙的工作环境中,选择合适的编程工具已成为提升开发者工作效率的关键。不同的工具能够帮助我们简化代码编写、自动化任务、提升调试速度,甚至让团队协作更加顺畅。那么,哪款编程工具让你的工作效率翻倍?是智能的代码编辑器,强大的版本控制工具,还是那些让你事半功倍

微信搜一搜下面搜索发现是什么?收录规则因素有哪些?如何能被搜索发现话题标签收录?
前言:为什么想到写这个?上周白杨SEO玩赚流量群里的一个群友私下问我怎么能被微信里搜索发现这个话题标签收录,问规则是什么,所以今天就来简单分享一下,如果你也感兴趣,可以看看。 文章大纲: 1、微信搜一搜下搜索发现是什么? 2、微信搜索发现里话题标签收录规则是啥? 3、怎么能被微信搜索发现里话题标签收录? 4、搜索发现对做SEO与推荐流量有啥好处? 微信搜一搜下搜索发现是
微博话题正则表达式匹配 ##
import java.util.LinkedHashSet;import java.util.Set;import java.util.regex.Matcher;import java.util.regex.Pattern;/*** @author XXX* Date: 2019/3/20* Description:*/public class RegexpUtil {/***
程序员面试题之分布式锁,分布式场景中的数据一致性问题一直是一个比较重要的话题,其中的核心就是分布式锁。在大多数系统设计时我们一般会牺牲掉强一致性来保证数据的最终一致性,这需要我们合理地使用分布式锁
【常见的分布式锁】 当前比较常见的分布式锁主要有基于Redis分布式锁、基于zookeeper分布式锁以及数据库乐观锁。 基于数据库的实现方式的核心思想是:在数据库中创建一个表,表中包含方法名等字段,并在方法名字段上创建唯一索引,想要执行某个方法,就使用这个方法名向表中插入数据,成功插入则获取锁,执行完成后删除对应的行数据释放锁。

ROStopic话题发布与订阅
ROS系统中依靠订阅同一个话题而实现不同包之间的节点通讯,分为话题的发布者(publisher)和话题订阅者(subscriber)。 发布者代码(publisher) #include <ros/ros.h>#include <std_msgs/String.h>int main(int argc, char* argv[]){ros::init(argc

一周一话题之四(JavaScript、Dom、Jquery全面复习总结js篇)
一、 JavaScript 做BS系统,JavaScript的使用是少不了的;本文就带你快速回顾一下JavaScript的基本知识,看看哪些基础知识是你所遗漏的 1. js介绍 ① js是一种基于对象和事件的脚本语言,使用浏览器来执行。 ② js是解释型语言,无需编译就可随时运行。 ③ 安全性:不允许访问本地硬盘;跨平台:有支持js的浏览器即可。 ④ 在网页中编写js代码推荐使用外部引用的方
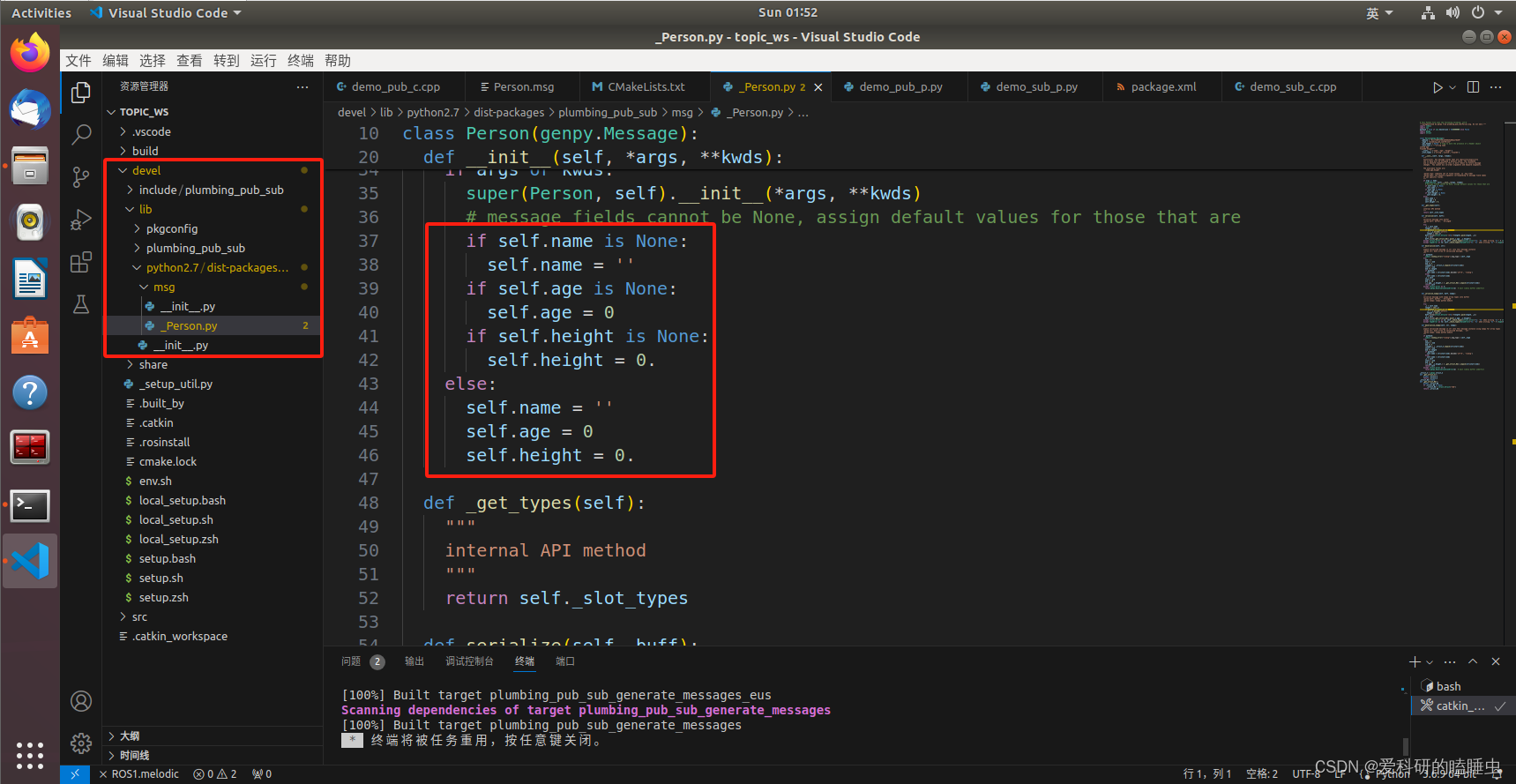
ROS话题通信流程自定义数据格式
ROS话题通信流程自定义数据格式 需求流程实现步骤定义msg文件编辑配置文件编译 在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如:
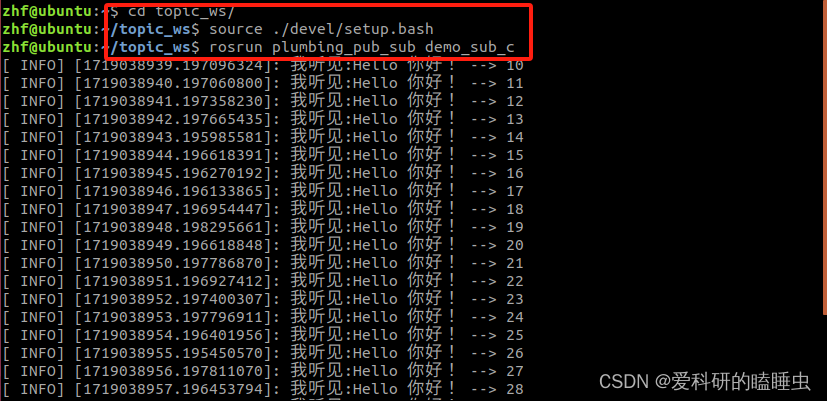
ROS话题通信机制实操C++
ROS话题通信机制实操C++ 创建ROS工程发布方(二狗子)订阅方(翠花)编辑配置文件编译并执行注意订阅的第一条数据丢失 ROS话题通信的理论查阅ROS话题通信流程理论 在ROS话题通信机制实现中,ROS master 不需要实现,且连接的建立也已经被封装了,需要关注的关键点有三个: 发布方(二狗子)订阅方(翠花)数据(此处为普通文本) 创建ROS工程 创建一个ROS工程
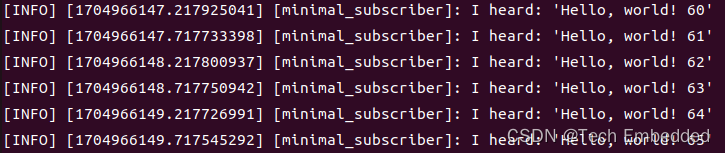
ROS2学习笔记三:话题Service
目录 前言 1 话题简介 2 常用指令 3 RCLCPP实现实现话题 3.1 创建工作空间 3.2 代码编写 3.2.1 发布端编写 3.2.2 发布端编写 前言 Service是ROS 2提供的一种通信机制,用于在不同节点之间进行请求和响应。 Service允许一个节点向另一个节点发送请求,并等待对方节点响应的消息。这种通信方式适用于需要交互式的、即时的通信场景,
使用 rosbag play 更改bag包发布的话题名称
在ROS开发中,有时我们需要回放已记录的ROS包文件(.bag),并将其中某个话题的数据重新映射到一个新的话题。这在数据处理、调试和系统集成时非常有用。例如,我们可能有一个记录了点云数据的ROS包文件,其中点云数据发布在 /kitti/velo/pointcloud 话题上,但我们的系统期望从 /velodyne_points 话题接收点云数据。这时,我们可以使用 rosbag play 命令来
ROS——自定义话题消息和使用方法
定义Person话题 定义Person发布者 /*** 该例程将发布/person_info话题,自定义消息类型: test_topic::Person*/#include <ros/ros.h>#include <test_topic/Person.h>//包含的头文件,ros相关的头文件,及自定义头文件int main(int argc, char **argv){// ROS节

【让AI写高考AI话题作文】看各大模型的回答
文章目录 命题chatGPT问题的消失,思考的萎缩 通义千问标题:在信息洪流中寻找智慧之光 文心一言探寻未知,拥抱无限的问题 命题 阅读下面的材料,根据要求写作。(60分) 随着互联网的普及、人工智能的应用,越来越多的问题能很快得到答案。那么,我们的问题是否会越来越少? 以上材料引发了你怎样的联想和思考?请写一篇文章。 要求:选准角度,确定立意,明确文体,自拟标题;不要套
【ROS使用记录】—— ros使用过程中的rosbag录制播放和ros话题信息相关的指令与操作记录
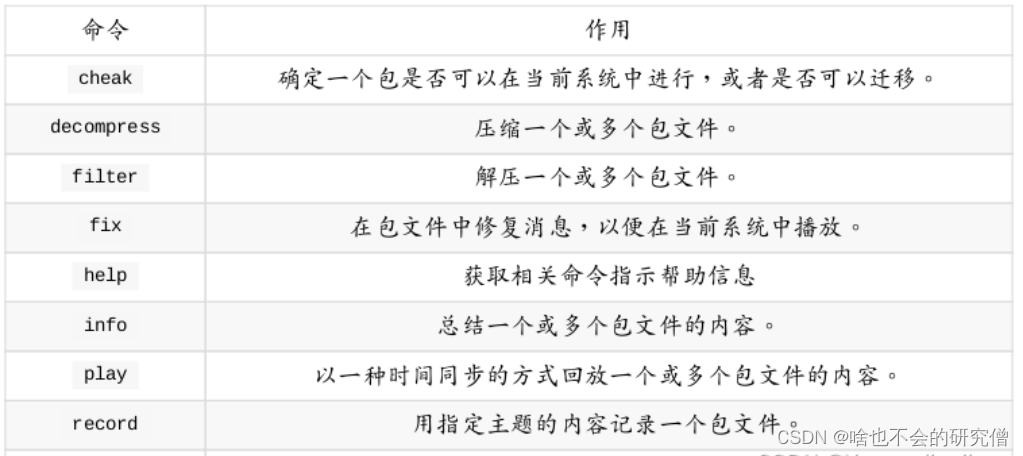
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、rosbag的介绍二、rosbag的在线和离线录制三、rosbag的播放相关的指令四、其他rosbag和ros话题相关的指令总结 前言 rosbag是ROS(机器人操作系统)中用于记录和回放数据的工具。录制数据可以帮助开发者在不同时间重新播放和分析实验数据,便于调试和验证算法。通过记录

(第13章)高级指针话题
文章目录 1.指向指针的指针2.高级声明3.函数指针(1)用途1:回调函数(2)用途2:转移表 4.传递命令行参数5.字符串常量6.总结 1.指向指针的指针 看eg: int i;int *pi;int **ppi;ppi=π//把ppi初始化为指向变量pi*ppi=&i;//把pi(通过ppi的间接访问)初始化为指向变量i,这里的*ppi指针就是pi指针//变量
在ros中获取话题的发布节点名称(C++)
文章目录 概要CMakeLists.txt主要代码效果 概要 在ROS中,直接从订阅回调函数中获取发布该话题的节点信息并不直接支持。ROS设计的发布-订阅机制并没有直接提供在回调函数中获取发布节点的接口。发布节点的信息主要通过rosgraph等工具来获取。 不过,可以通过以下几种方式间接实现: 记录发布节点的信息:如果你能够控制发布节点,你可以在消息中包含发布节点的信息。例

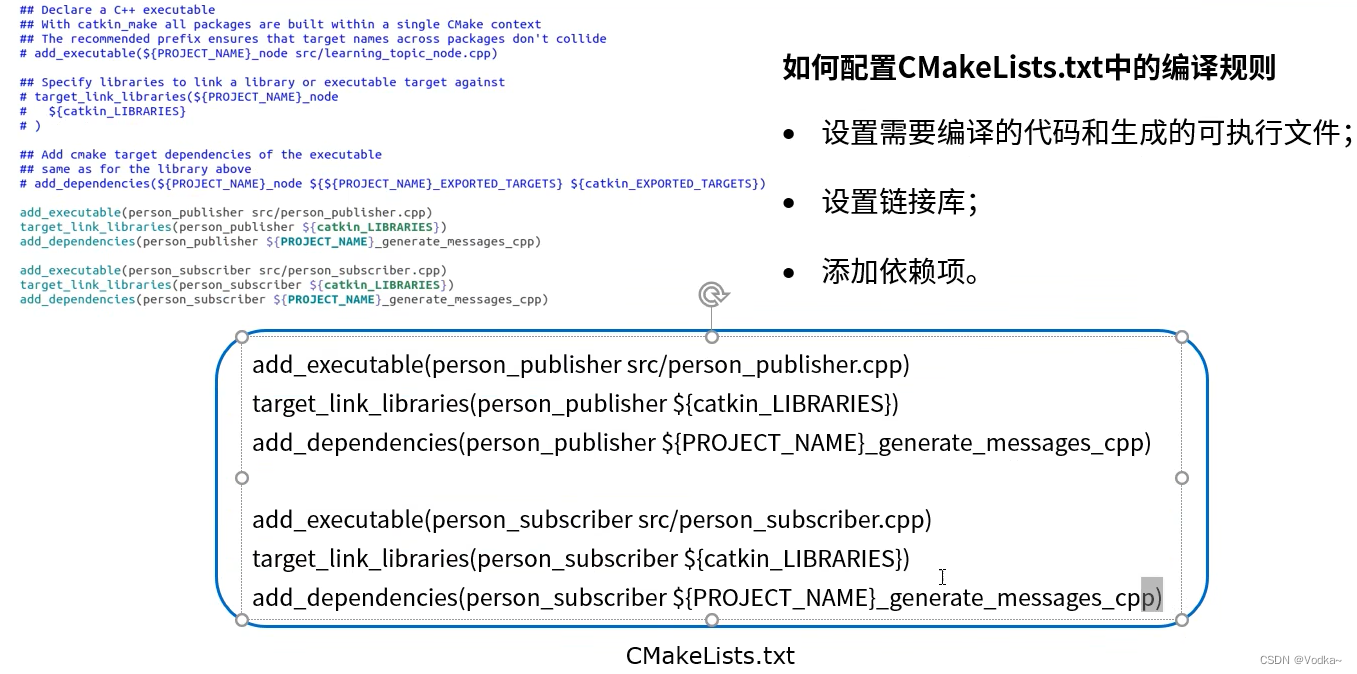
C++入门 ros自定义msg话题通信
一、 开发环境 ubuntu20.04 ros版本noetic 参考视频 https://www.bilibili.com/video/BV1Ci4y1L7ZZ/?p=52&spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=4cd1b6f268e2a29a11bea5d2568836ee 二、 编

ROS基础学习-话题通信机制研究
研究ROS通信机制 研究ROS通信机制 0.前言1.话题通信1.1 理论模型1.2 话题通讯的基本操作1.2.1 C++1.2.2 Python中使用自己的虚拟环境包1.2.2.1 参考11.2.2.2 参考21.2.2.3 /usr/bin/env:“python”:没有那个文件或目录 1.2.3 Python1.2.2.1 发布方1.2.2.2 订阅方1.2.2.3 添加可执行权
Chrome DevTools攻略(话题文章)
目录 Chrome DevTools 概览 访问 DevTools DevTools 窗口 审查DOM元素和样式 使用Console 调试 JavaScript 提高网络性能 监听 提高渲染性能 JavaScript & CSS 性能 审查存储

【话题】AIGC行业现在适合进入吗
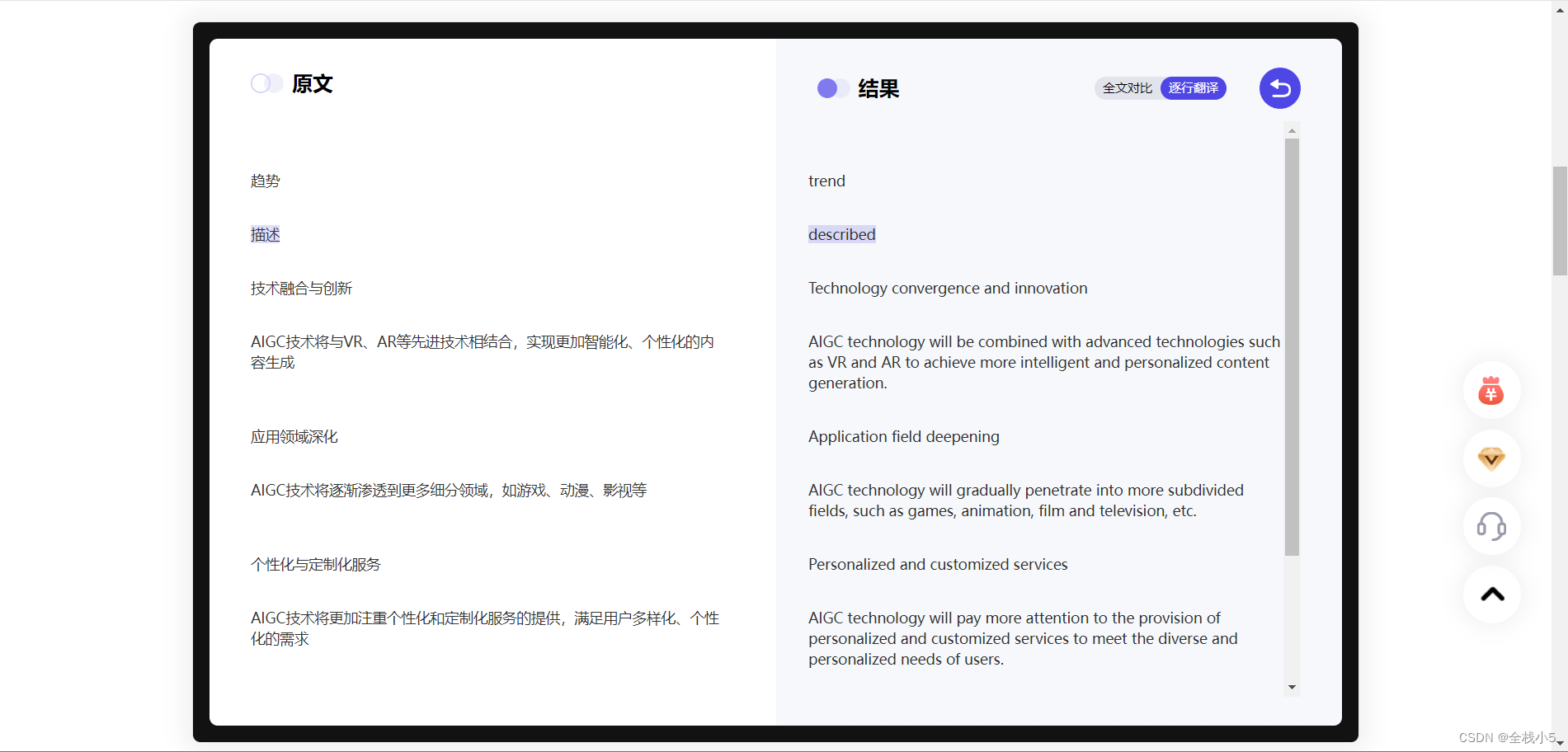
大家好,我是全栈小5,欢迎阅读小5的系列文章,这是《话题》系列文章 目录 引言AIGC的发展阶段市场需求时机是否合适优势挑战 文章推荐 引言 在撰写关于当前是否适合进入AIGC(人工智能生成内容)行业的文章之前,我们需要先了解AIGC的定义、发展阶段以及市场需求。AIGC是指利用人工智能技术自动生成内容,包括文本、图像、视频、音频等形式。随着机器学习和深度学习技术的进步

ROS总结——ROS话题
理解ROS话题 本博客是对http://wiki.ros.org/上ROS教程的学习总结,欢迎大家交流学习。本节介绍ROS话题(topics)以及如何使用rostopic 和 rxplot 命令行工具。 1.运行turtlesim 首先确保roscore已经运行, 打开一个新的终端: $ roscore 在一个新的终端中运行: $ rosrun turtlesim turtlesi
从ROS到数据库:用Python将ROS话题消息保存到数据库
观前提醒:本博客介绍如何使用Python订阅ROS话题,并将接收到的消息保存到SQL数据库中,包括MySQL和SQL Server两种情况。 使用Python订阅ROS话题并将消息保存至MySQL数据库 下面我们将详细介绍如何使用Python订阅ROS话题,并将接收的数据保存到MySQL数据库中。这种技术可以用于机器人数据的记录、分析和回放。 第一步:安装Python依赖库 我们将使用ro
【话题】软件开发的航海图:程序员的实用神器探秘
大家好,我是全栈小5,欢迎阅读小5的系列文章,这是《话题》系列文章 目录 背景一、代码编写二、版本控制三、测试与调试四、部署与运维五、总结文章推荐 背景 在软件开发的广阔海洋中,每一位程序员都是一位勇敢的航海家,他们驾驭着代码的巨轮,穿越逻辑的漩涡,与时间的潮汐搏斗。 在这片无边无际的海洋上,没有一成不变的航线,但有了那些实用的开发工具,就如同拥有了航海中的指南针,它
【话题】你用过最好用的AI工具有那些
大家好,我是全栈小5,欢迎阅读小5的系列文章,这是《话题》系列文章 目录 背景一、C知道二、CSDN工具集三、AI工具的普及与受欢迎程度四、AI工具的实际应用与影响五、总结与展望文章推荐 背景 探讨人们在使用AI工具时,最喜欢的和认为最好用的工具是哪些,展示AI技术的实际应用和影响。 在数字时代的浪潮中,人工智能(AI)技术的快速发展和应用,正在深刻改变着我们的工作和生

Spring高级话题-计划任务-@EnableScheduling
【Spring】Spring高级话题-计划任务-@EnableScheduling 2 分析 要实现计划任务,首先通过在配置类注解@EnableScheduling来开启对计划任务的支持,然后在要执行计划任务的方法上注解@Scheduled,声明这是一个计划任务。 Spring通过@Scheduled支持多种类型的计划任务,包含cron、fixDelay、fixR

话题模型-topic model
reference:http://blog.csdn.net/xianlingmao/article/details/7076165 http://blog.sina.com.cn/s/blog_5033f3b40101flbj.html 1. 话题模型(topic model)的提出及发展历史 topic model 是一种应用十分广泛的产